 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHow Can Reinforcement Learning Achieve Expert-level Placement?
Apr 28, 2026Chip placement is a critical step in physical design. While reinforcement learning (RL)-based methods have recently emerged, their training primarily focuses on wirelength optimization, and therefore often fail to achieve expert-quality layouts. We identify the reward design as the primary cause for the performance gap with experts, and instead of formalizing intricate processes, we circumvent this by directly learning from expert layouts to derive a reward model. Our approach starts from the final expert layouts to infer step-by-step expert trajectories. Using these trajectories as demonstrations or preferences, we train a model that captures the latent implicit rewards in expert results. Experiments show that our framework can efficiently learn from even a single design and generalize well to unseen cases.
FlowPlace: Flow Matching for Chip Placement
Apr 26, 2026Chip placement plays an important role in physical design. While generative models like diffusion models offer promising learning-based solutions, current methods have the following limitations: they use random synthetic data for pre-training, require long sampling times, and often result in overlaps due to their dependence on gradient-based solvers during the sampling process. To overcome these issues, we propose FlowPlace, which features mask-guided synthetic data generation, flow-based efficient training with flexible prior injection, and hard constraint sampling for overlap-free layouts. Experiments on OpenROAD and ICCAD 2015 benchmarks show FlowPlace achieves better PPA metrics, 10-50$\times$ faster sampling efficiency, and zero overlaps.
Data-Driven Reachability Analysis via Diffusion Models with PAC Guarantees
Mar 31, 2026We present a data-driven framework for reachability analysis of nonlinear dynamical systems that requires no explicit model. A denoising diffusion probabilistic model learns the time-evolving state distribution of a dynamical system from trajectory data alone. The predicted reachable set takes the form of a sublevel set of a nonconformity score derived from the reconstruction error, with the threshold calibrated via the Learn Then Test procedure so that the probability of excluding a reachable state is bounded with high probability. Experiments on three nonlinear systems, a forced Duffing oscillator, a planar quadrotor, and a high-dimensional reaction-diffusion system, confirm that the empirical miss rate remains below the Probably Approximately Correct (PAC) bound while scaling to state dimensions beyond the reach of classical grid-based and polynomial methods.
GNN-DIP: Neural Corridor Selection for Decomposition-Based Motion Planning
Mar 12, 2026Motion planning through narrow passages remains a core challenge: sampling-based planners rarely place samples inside these narrow but critical regions, and even when samples land inside a passage, the straight-line connections between them run close to obstacle boundaries and are frequently rejected by collision checking. Decomposition-based planners resolve both issues by partitioning free space into convex cells -- every passage is captured exactly as a cell boundary, and any path within a cell is collision-free by construction. However, the number of candidate corridors through the cell graph grows combinatorially with environment complexity, creating a bottleneck in corridor selection. We present GNN-DIP, a framework that addresses this by integrating a Graph Neural Network (GNN) with a two-phase Decomposition-Informed Planner (DIP). The GNN predicts portal scores on the cell adjacency graph to bias corridor search toward near-optimal regions while preserving completeness. In 2D, Constrained Delaunay Triangulation (CDT) with the Funnel algorithm yields exact shortest paths within corridors; in 3D, Slab convex decomposition with portal-face sampling provides near-optimal path evaluation. Benchmarks on 2D narrow-passage scenarios, 3D bottleneck environments with up to 246 obstacles, and dynamic 2D settings show that GNN-DIP achieves 99--100% success rates with 2--280 times speedup over sampling-based baselines.
Chain of Attack: On the Robustness of Vision-Language Models Against Transfer-Based Adversarial Attacks
Nov 24, 2024



Pre-trained vision-language models (VLMs) have showcased remarkable performance in image and natural language understanding, such as image captioning and response generation. As the practical applications of vision-language models become increasingly widespread, their potential safety and robustness issues raise concerns that adversaries may evade the system and cause these models to generate toxic content through malicious attacks. Therefore, evaluating the robustness of open-source VLMs against adversarial attacks has garnered growing attention, with transfer-based attacks as a representative black-box attacking strategy. However, most existing transfer-based attacks neglect the importance of the semantic correlations between vision and text modalities, leading to sub-optimal adversarial example generation and attack performance. To address this issue, we present Chain of Attack (CoA), which iteratively enhances the generation of adversarial examples based on the multi-modal semantic update using a series of intermediate attacking steps, achieving superior adversarial transferability and efficiency. A unified attack success rate computing method is further proposed for automatic evasion evaluation. Extensive experiments conducted under the most realistic and high-stakes scenario, demonstrate that our attacking strategy can effectively mislead models to generate targeted responses using only black-box attacks without any knowledge of the victim models. The comprehensive robustness evaluation in our paper provides insight into the vulnerabilities of VLMs and offers a reference for the safety considerations of future model developments.
UMOD: A Novel and Effective Urban Metro Origin-Destination Flow Prediction Method
Sep 08, 2024



Accurate prediction of metro Origin-Destination (OD) flow is essential for the development of intelligent transportation systems and effective urban traffic management. Existing approaches typically either predict passenger outflow of departure stations or inflow of destination stations. However, we argue that travelers generally have clearly defined departure and arrival stations, making these OD pairs inherently interconnected. Consequently, considering OD pairs as a unified entity more accurately reflects actual metro travel patterns and allows for analyzing potential spatio-temporal correlations between different OD pairs. To address these challenges, we propose a novel and effective urban metro OD flow prediction method (UMOD), comprising three core modules: a data embedding module, a temporal relation module, and a spatial relation module. The data embedding module projects raw OD pair inputs into hidden space representations, which are subsequently processed by the temporal and spatial relation modules to capture both inter-pair and intra-pair spatio-temporal dependencies. Experimental results on two real-world urban metro OD flow datasets demonstrate that adopting the OD pairs perspective is critical for accurate metro OD flow prediction. Our method outperforms existing approaches, delivering superior predictive performance.
Whisper-MCE: Whisper Model Finetuned for Better Performance with Mixed Languages
Oct 27, 2023



Recently Whisper has approached human-level robustness and accuracy in English automatic speech recognition (ASR), while in minor language and mixed language speech recognition, there remains a compelling need for further improvement. In this work, we present the impressive results of Whisper-MCE, our finetuned Whisper model, which was trained using our self-collected dataset, Mixed Cantonese and English audio dataset (MCE). Meanwhile, considering word error rate (WER) poses challenges when it comes to evaluating its effectiveness in minor language and mixed-language contexts, we present a novel rating mechanism. By comparing our model to the baseline whisper-large-v2 model, we demonstrate its superior ability to accurately capture the content of the original audio, achieve higher recognition accuracy, and exhibit faster recognition speed. Notably, our model outperforms other existing models in the specific task of recognizing mixed language.
Spatio-Temporal Dynamic Graph Relation Learning for Urban Metro Flow Prediction
Apr 06, 2022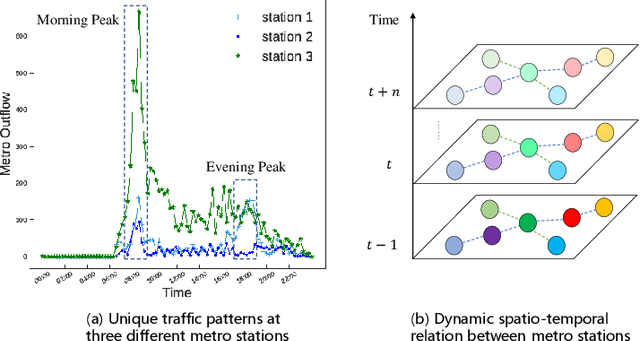

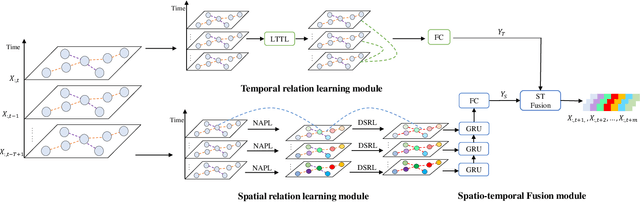
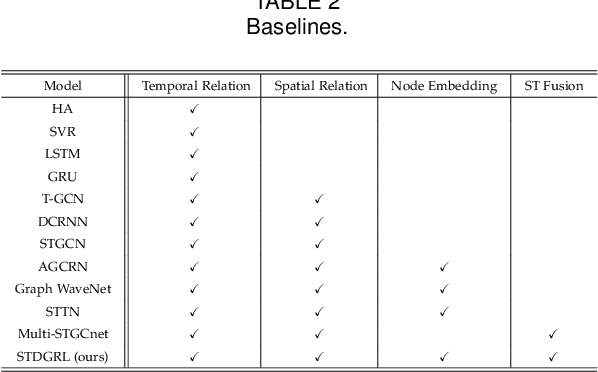
Urban metro flow prediction is of great value for metro operation scheduling, passenger flow management and personal travel planning. However, it faces two main challenges. First, different metro stations, e.g. transfer stations and non-transfer stations, have unique traffic patterns. Second, it is challenging to model complex spatio-temporal dynamic relation of metro stations. To address these challenges, we develop a spatio-temporal dynamic graph relational learning model (STDGRL) to predict urban metro station flow. First, we propose a spatio-temporal node embedding representation module to capture the traffic patterns of different stations. Second, we employ a dynamic graph relationship learning module to learn dynamic spatial relationships between metro stations without a predefined graph adjacency matrix. Finally, we provide a transformer-based long-term relationship prediction module for long-term metro flow prediction. Extensive experiments are conducted based on metro data in Beijing, Shanghai, Chongqing and Hangzhou. Experimental results show the advantages of our method beyond 11 baselines for urban metro flow prediction.
HiSTGNN: Hierarchical Spatio-temporal Graph Neural Networks for Weather Forecasting
Jan 22, 2022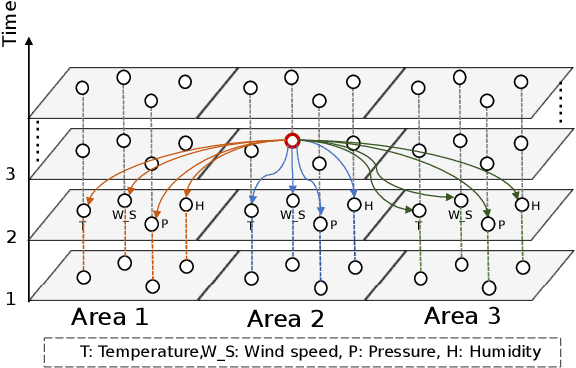
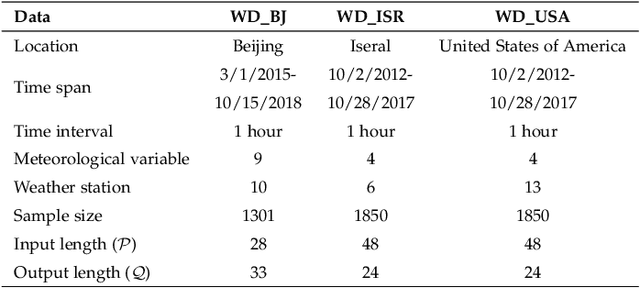
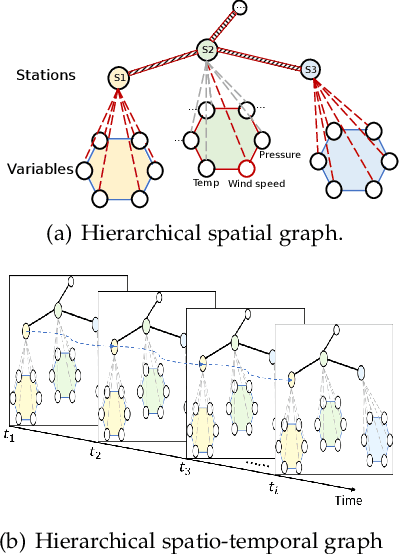
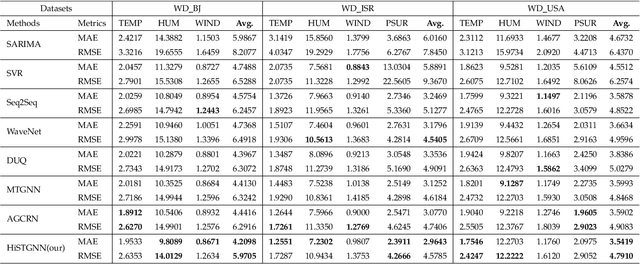
Weather Forecasting is an attractive challengeable task due to its influence on human life and complexity in atmospheric motion. Supported by massive historical observed time series data, the task is suitable for data-driven approaches, especially deep neural networks. Recently, the Graph Neural Networks (GNNs) based methods have achieved excellent performance for spatio-temporal forecasting. However, the canonical GNNs-based methods only individually model the local graph of meteorological variables per station or the global graph of whole stations, lacking information interaction between meteorological variables in different stations. In this paper, we propose a novel Hierarchical Spatio-Temporal Graph Neural Network (HiSTGNN) to model cross-regional spatio-temporal correlations among meteorological variables in multiple stations. An adaptive graph learning layer and spatial graph convolution are employed to construct self-learning graph and study hidden dependency among nodes of variable-level and station-level graph. For capturing temporal pattern, the dilated inception as the backbone of gate temporal convolution is designed to model long and various meteorological trends. Moreover, a dynamic interaction learning is proposed to build bidirectional information passing in hierarchical graph. Experimental results on three real-world meteorological datasets demonstrate the superior performance of HiSTGNN beyond 7 baselines and it reduces the errors by 4.2% to 11.6% especially compared to state-of-the-art weather forecasting method.
Exploring Multi-dimensional Data via Subset Embedding
Apr 24, 2021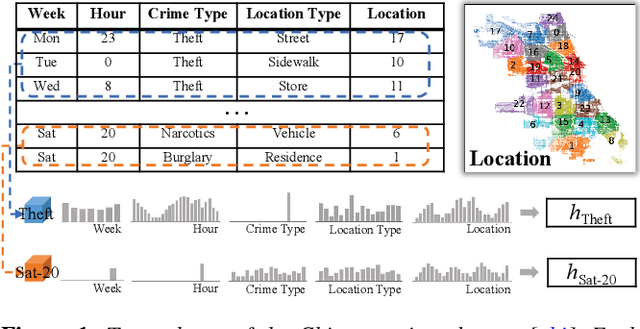
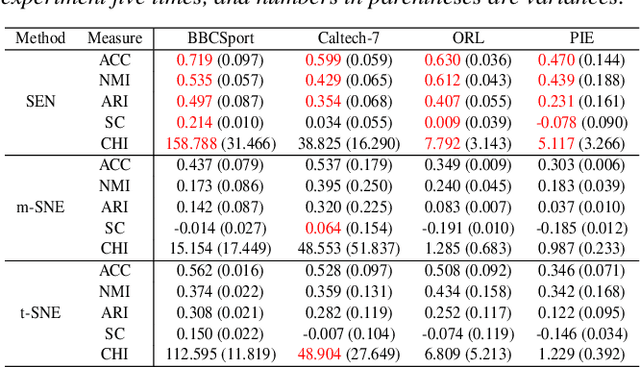
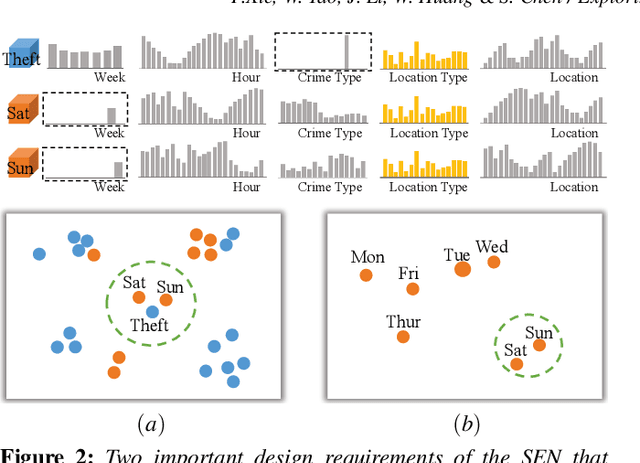

Multi-dimensional data exploration is a classic research topic in visualization. Most existing approaches are designed for identifying record patterns in dimensional space or subspace. In this paper, we propose a visual analytics approach to exploring subset patterns. The core of the approach is a subset embedding network (SEN) that represents a group of subsets as uniformly-formatted embeddings. We implement the SEN as multiple subnets with separate loss functions. The design enables to handle arbitrary subsets and capture the similarity of subsets on single features, thus achieving accurate pattern exploration, which in most cases is searching for subsets having similar values on few features. Moreover, each subnet is a fully-connected neural network with one hidden layer. The simple structure brings high training efficiency. We integrate the SEN into a visualization system that achieves a 3-step workflow. Specifically, analysts (1) partition the given dataset into subsets, (2) select portions in a projected latent space created using the SEN, and (3) determine the existence of patterns within selected subsets. Generally, the system combines visualizations, interactions, automatic methods, and quantitative measures to balance the exploration flexibility and operation efficiency, and improve the interpretability and faithfulness of the identified patterns. Case studies and quantitative experiments on multiple open datasets demonstrate the general applicability and effectiveness of our approach.