 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAcme: A Research Framework for Distributed Reinforcement Learning
Jun 01, 2020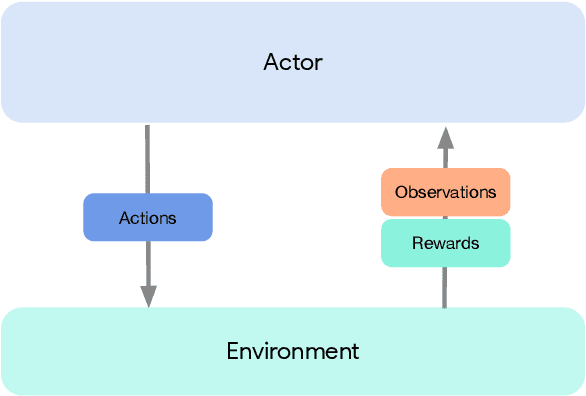
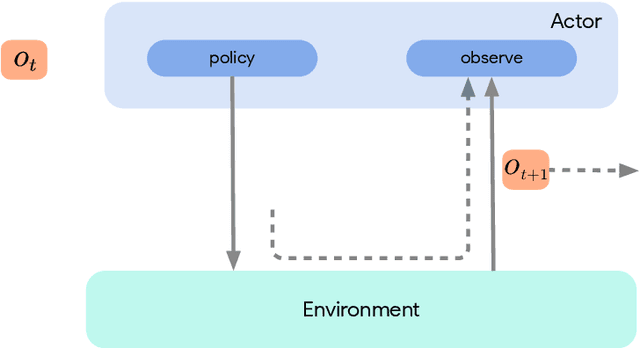
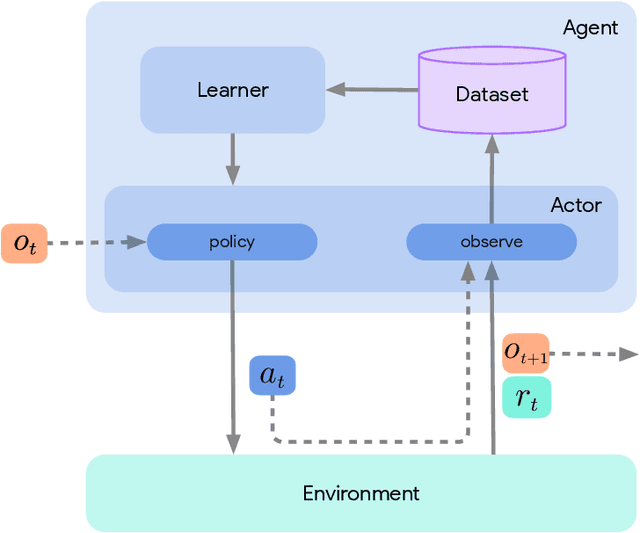
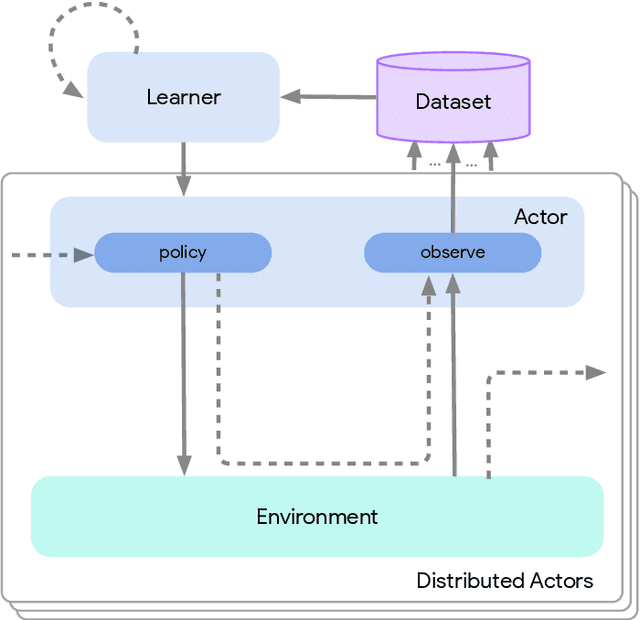
Deep reinforcement learning has led to many recent-and groundbreaking-advancements. However, these advances have often come at the cost of both the scale and complexity of the underlying RL algorithms. Increases in complexity have in turn made it more difficult for researchers to reproduce published RL algorithms or rapidly prototype ideas. To address this, we introduce Acme, a tool to simplify the development of novel RL algorithms that is specifically designed to enable simple agent implementations that can be run at various scales of execution. Our aim is also to make the results of various RL algorithms developed in academia and industrial labs easier to reproduce and extend. To this end we are releasing baseline implementations of various algorithms, created using our framework. In this work we introduce the major design decisions behind Acme and show how these are used to construct these baselines. We also experiment with these agents at different scales of both complexity and computation-including distributed versions. Ultimately, we show that the design decisions behind Acme lead to agents that can be scaled both up and down and that, for the most part, greater levels of parallelization result in agents with equivalent performance, just faster.
Task-Relevant Adversarial Imitation Learning
Oct 02, 2019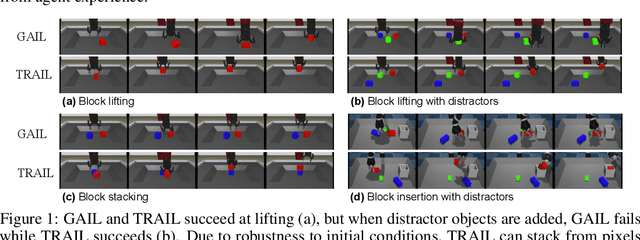
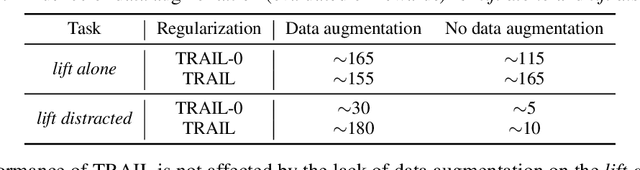
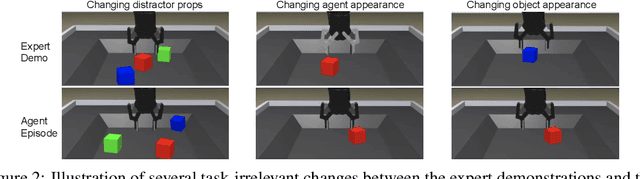
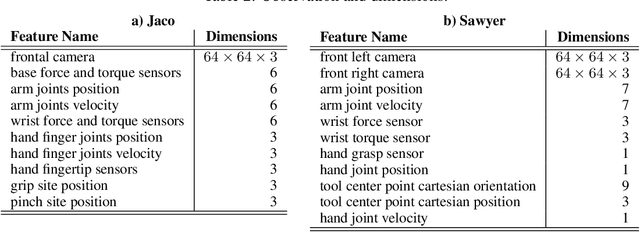
We show that a critical problem in adversarial imitation from high-dimensional sensory data is the tendency of discriminator networks to distinguish agent and expert behaviour using task-irrelevant features beyond the control of the agent. We analyze this problem in detail and propose a solution as well as several baselines that outperform standard Generative Adversarial Imitation Learning (GAIL). Our proposed solution, Task-Relevant Adversarial Imitation Learning (TRAIL), uses a constrained optimization objective to overcome task-irrelevant features. Comprehensive experiments show that TRAIL can solve challenging manipulation tasks from pixels by imitating human operators, where other agents such as behaviour cloning (BC), standard GAIL, improved GAIL variants including our newly proposed baselines, and Deterministic Policy Gradients from Demonstrations (DPGfD) fail to find solutions, even when the other agents have access to task reward.
A Framework for Data-Driven Robotics
Sep 26, 2019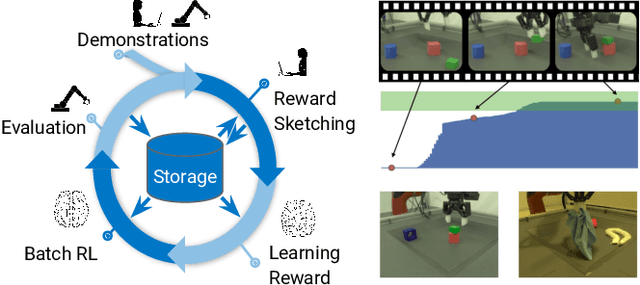
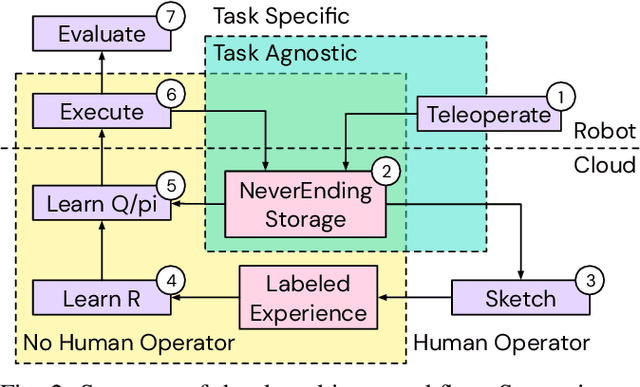
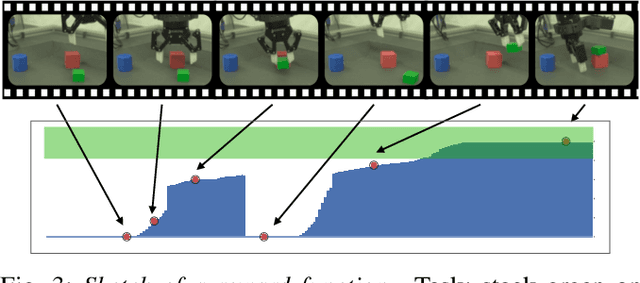
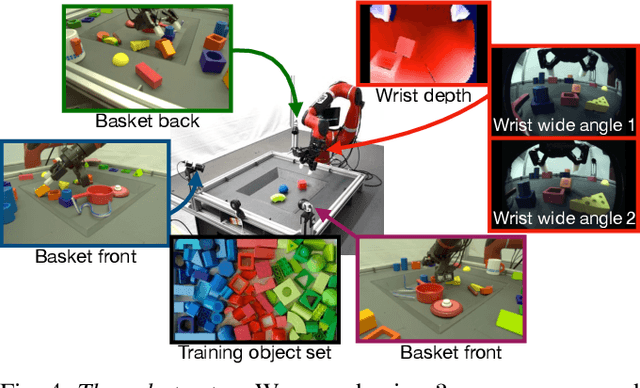
We present a framework for data-driven robotics that makes use of a large dataset of recorded robot experience and scales to several tasks using learned reward functions. We show how to apply this framework to accomplish three different object manipulation tasks on a real robot platform. Given demonstrations of a task together with task-agnostic recorded experience, we use a special form of human annotation as supervision to learn a reward function, which enables us to deal with real-world tasks where the reward signal cannot be acquired directly. Learned rewards are used in combination with a large dataset of experience from different tasks to learn a robot policy offline using batch RL. We show that using our approach it is possible to train agents to perform a variety of challenging manipulation tasks including stacking rigid objects and handling cloth.
Modular Meta-Learning with Shrinkage
Sep 12, 2019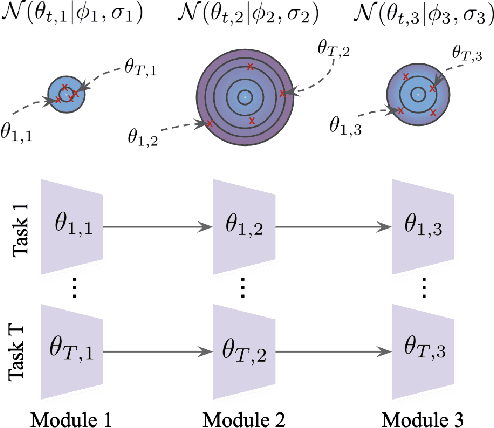
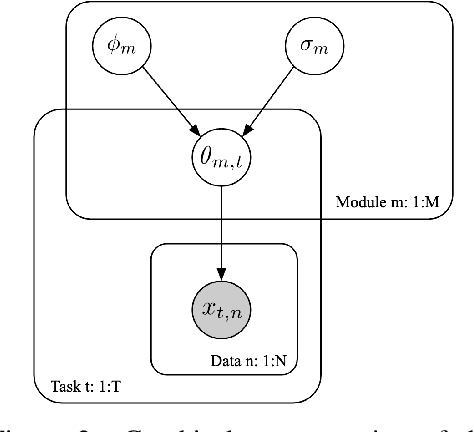
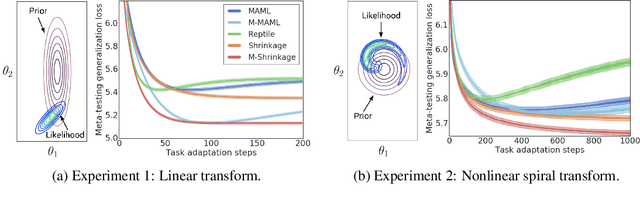
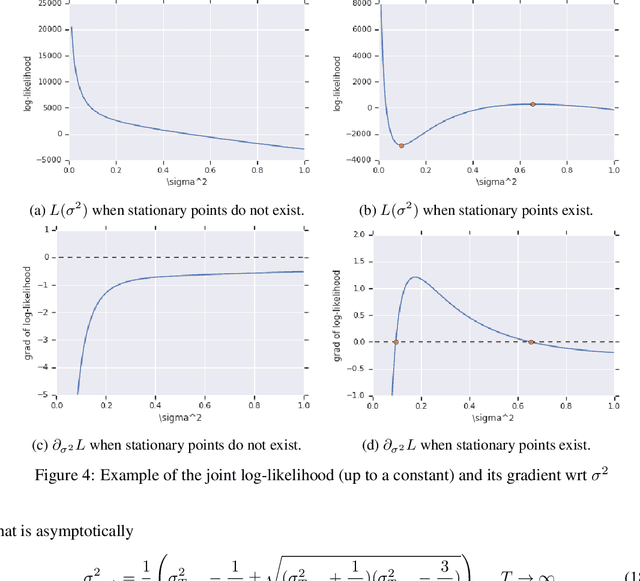
Most gradient-based approaches to meta-learning do not explicitly account for the fact that different parts of the underlying model adapt by different amounts when applied to a new task. For example, the input layers of an image classification convnet typically adapt very little, while the output layers can change significantly. This can cause parts of the model to begin to overfit while others underfit. To address this, we introduce a hierarchical Bayesian model with per-module shrinkage parameters, which we propose to learn by maximizing an approximation of the predictive likelihood using implicit differentiation. Our algorithm subsumes Reptile and outperforms variants of MAML on two synthetic few-shot meta-learning problems.
Making Efficient Use of Demonstrations to Solve Hard Exploration Problems
Sep 03, 2019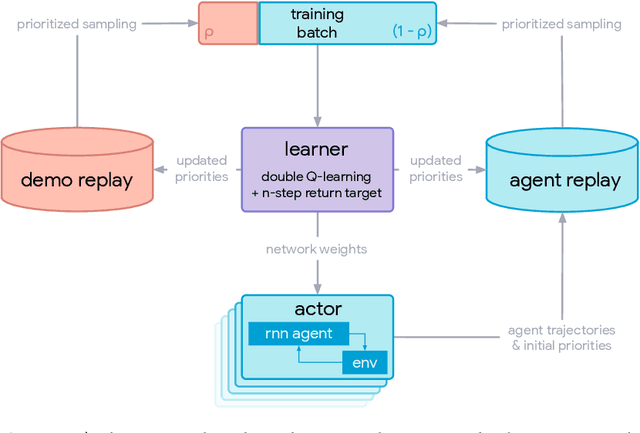
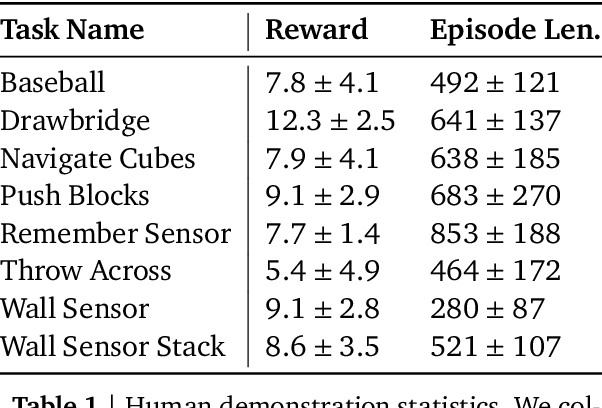
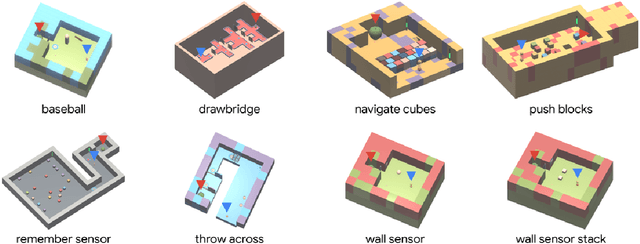
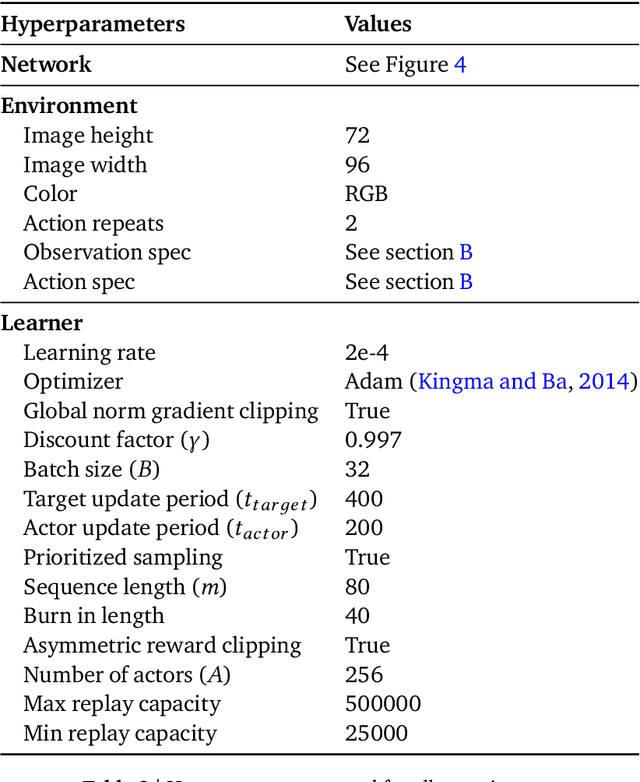
This paper introduces R2D3, an agent that makes efficient use of demonstrations to solve hard exploration problems in partially observable environments with highly variable initial conditions. We also introduce a suite of eight tasks that combine these three properties, and show that R2D3 can solve several of the tasks where other state of the art methods (both with and without demonstrations) fail to see even a single successful trajectory after tens of billions of steps of exploration.
Learning Compositional Neural Programs with Recursive Tree Search and Planning
May 30, 2019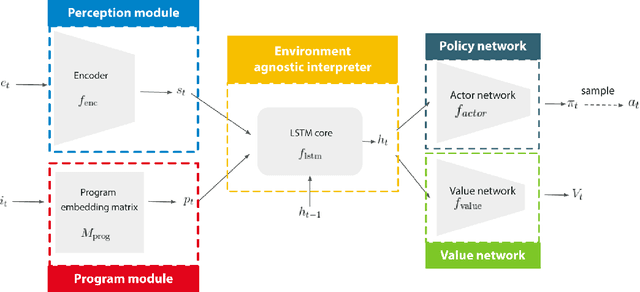
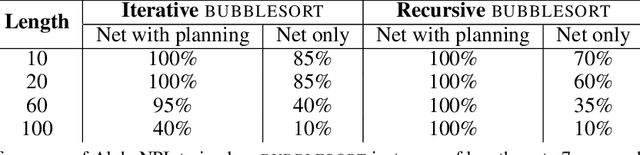
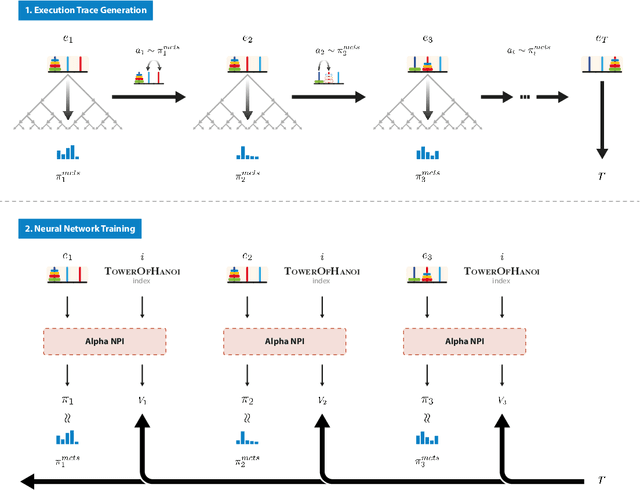
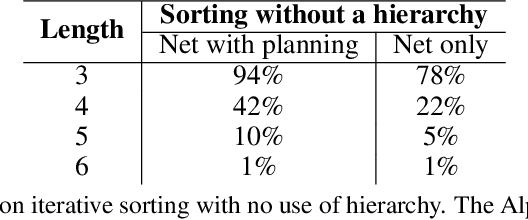
We propose a novel reinforcement learning algorithm, AlphaNPI, that incorporates the strengths of Neural Programmer-Interpreters (NPI) and AlphaZero. NPI contributes structural biases in the form of modularity, hierarchy and recursion, which are helpful to reduce sample complexity, improve generalization and increase interpretability. AlphaZero contributes powerful neural network guided search algorithms, which we augment with recursion. AlphaNPI only assumes a hierarchical program specification with sparse rewards: 1 when the program execution satisfies the specification, and 0 otherwise. Using this specification, AlphaNPI is able to train NPI models effectively with RL for the first time, completely eliminating the need for strong supervision in the form of execution traces. The experiments show that AlphaNPI can sort as well as previous strongly supervised NPI variants. The AlphaNPI agent is also trained on a Tower of Hanoi puzzle with two disks and is shown to generalize to puzzles with an arbitrary number of disk
Meta-learning of Sequential Strategies
May 08, 2019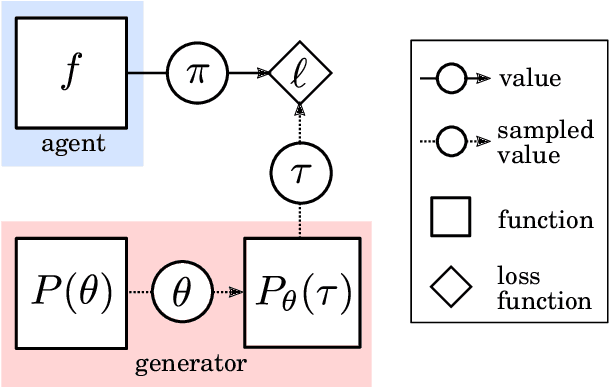
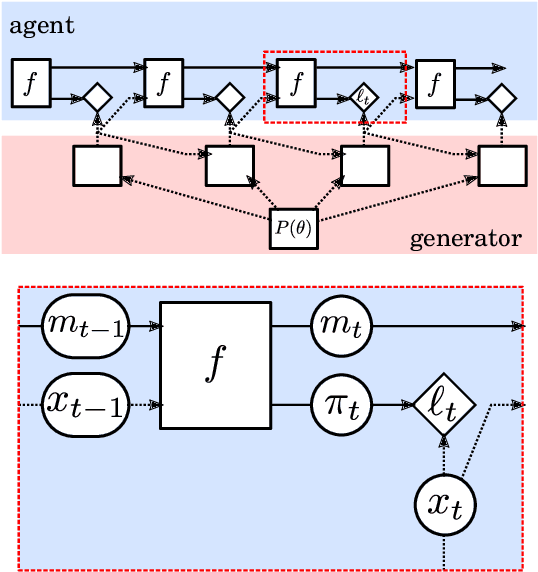
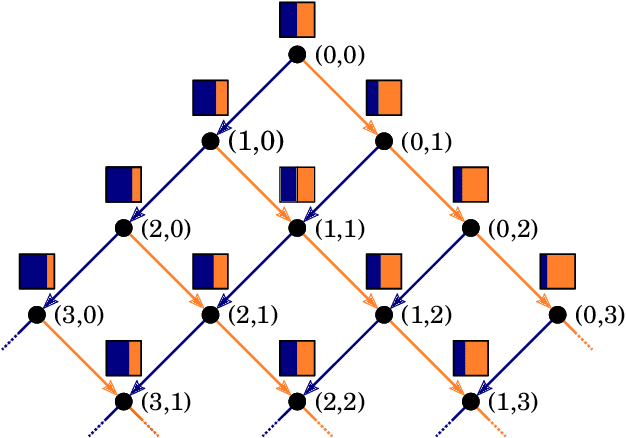
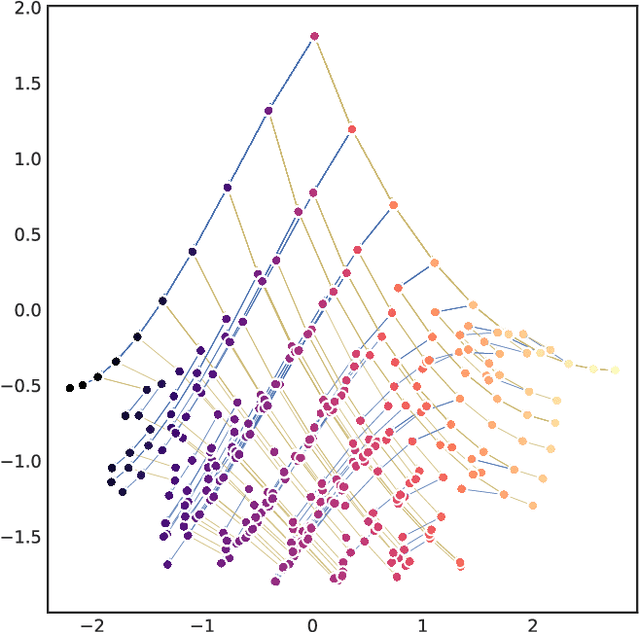
In this report we review memory-based meta-learning as a tool for building sample-efficient strategies that learn from past experience to adapt to any task within a target class. Our goal is to equip the reader with the conceptual foundations of this tool for building new, scalable agents that operate on broad domains. To do so, we present basic algorithmic templates for building near-optimal predictors and reinforcement learners which behave as if they had a probabilistic model that allowed them to efficiently exploit task structure. Furthermore, we recast memory-based meta-learning within a Bayesian framework, showing that the meta-learned strategies are near-optimal because they amortize Bayes-filtered data, where the adaptation is implemented in the memory dynamics as a state-machine of sufficient statistics. Essentially, memory-based meta-learning translates the hard problem of probabilistic sequential inference into a regression problem.
Bayesian Optimization in AlphaGo
Dec 17, 2018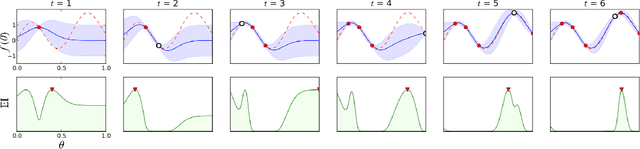
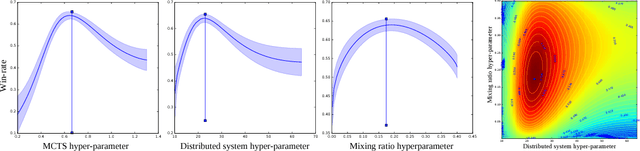
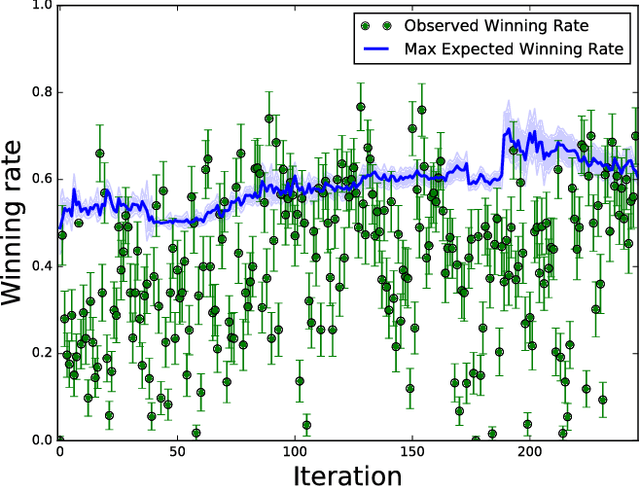
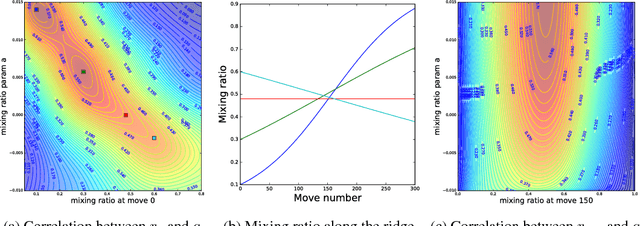
During the development of AlphaGo, its many hyper-parameters were tuned with Bayesian optimization multiple times. This automatic tuning process resulted in substantial improvements in playing strength. For example, prior to the match with Lee Sedol, we tuned the latest AlphaGo agent and this improved its win-rate from 50% to 66.5% in self-play games. This tuned version was deployed in the final match. Of course, since we tuned AlphaGo many times during its development cycle, the compounded contribution was even higher than this percentage. It is our hope that this brief case study will be of interest to Go fans, and also provide Bayesian optimization practitioners with some insights and inspiration.
Intrinsic Social Motivation via Causal Influence in Multi-Agent RL
Oct 19, 2018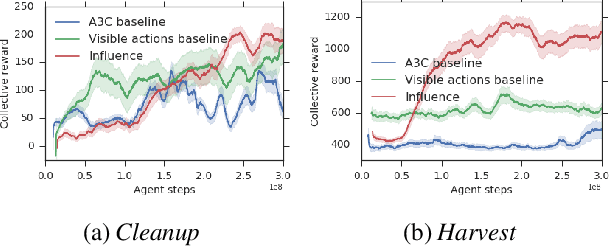
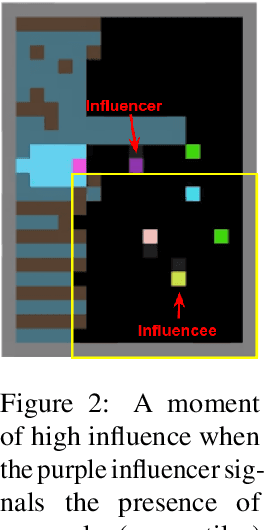
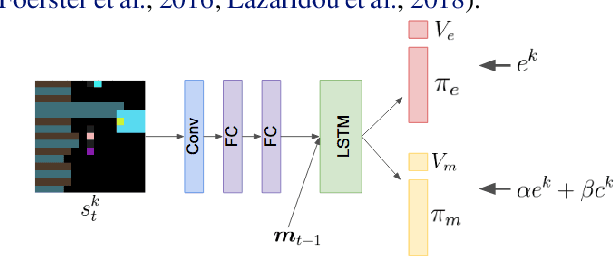
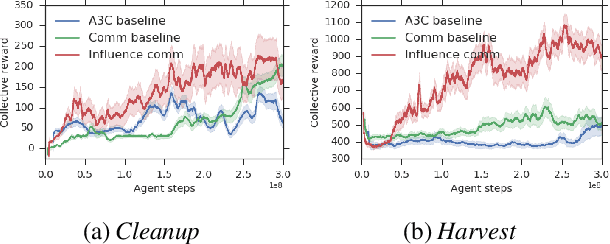
We derive a new intrinsic social motivation for multi-agent reinforcement learning (MARL), in which agents are rewarded for having causal influence over another agent's actions. Causal influence is assessed using counterfactual reasoning. The reward does not depend on observing another agent's reward function, and is thus a more realistic approach to MARL than taken in previous work. We show that the causal influence reward is related to maximizing the mutual information between agents' actions. We test the approach in challenging social dilemma environments, where it consistently leads to enhanced cooperation between agents and higher collective reward. Moreover, we find that rewarding influence can lead agents to develop emergent communication protocols. We therefore employ influence to train agents to use an explicit communication channel, and find that it leads to more effective communication and higher collective reward. Finally, we show that influence can be computed by equipping each agent with an internal model that predicts the actions of other agents. This allows the social influence reward to be computed without the use of a centralised controller, and as such represents a significantly more general and scalable inductive bias for MARL with independent agents.
One-Shot High-Fidelity Imitation: Training Large-Scale Deep Nets with RL
Oct 11, 2018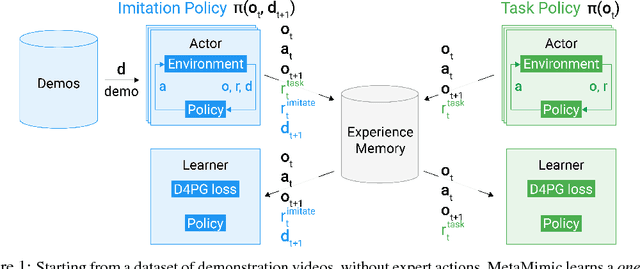
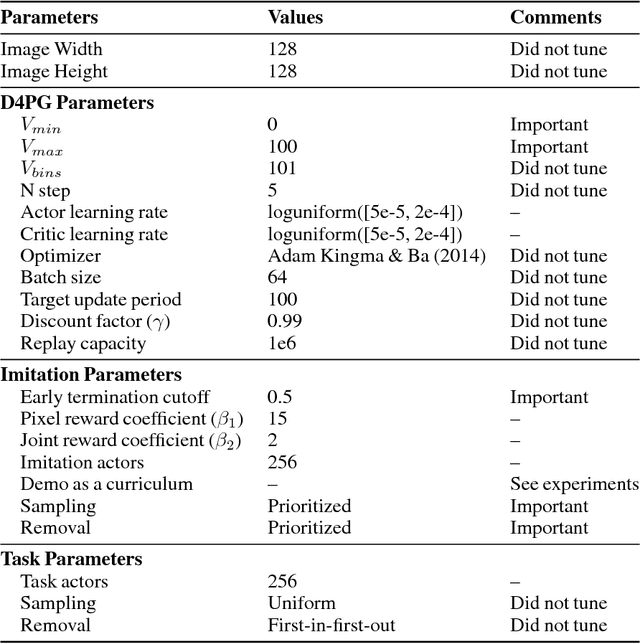
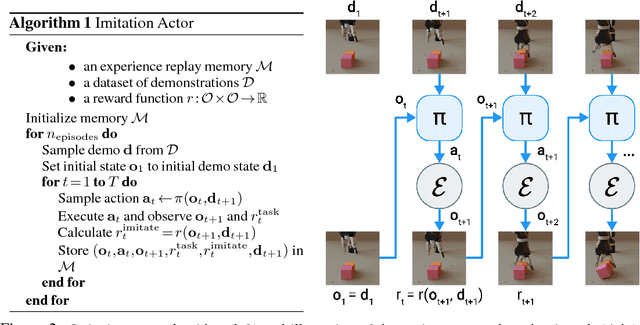
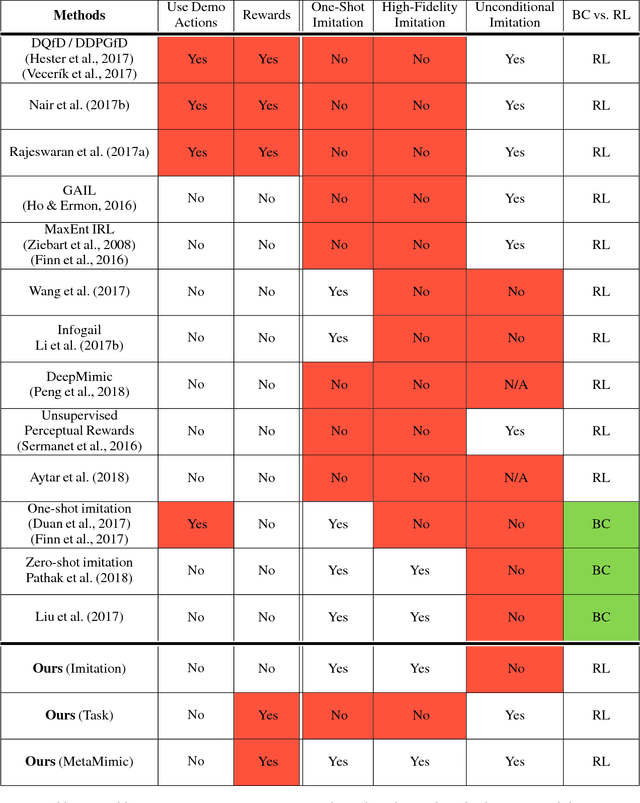
Humans are experts at high-fidelity imitation -- closely mimicking a demonstration, often in one attempt. Humans use this ability to quickly solve a task instance, and to bootstrap learning of new tasks. Achieving these abilities in autonomous agents is an open problem. In this paper, we introduce an off-policy RL algorithm (MetaMimic) to narrow this gap. MetaMimic can learn both (i) policies for high-fidelity one-shot imitation of diverse novel skills, and (ii) policies that enable the agent to solve tasks more efficiently than the demonstrators. MetaMimic relies on the principle of storing all experiences in a memory and replaying these to learn massive deep neural network policies by off-policy RL. This paper introduces, to the best of our knowledge, the largest existing neural networks for deep RL and shows that larger networks with normalization are needed to achieve one-shot high-fidelity imitation on a challenging manipulation task. The results also show that both types of policy can be learned from vision, in spite of the task rewards being sparse, and without access to demonstrator actions.