 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSWFormer: Sparse Window Transformer for 3D Object Detection in Point Clouds
Oct 13, 2022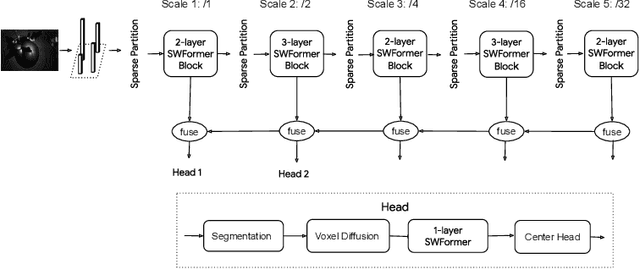
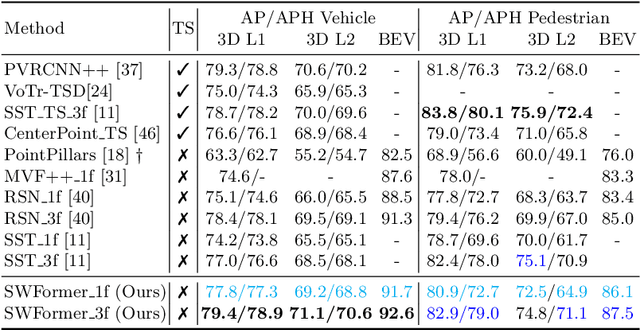
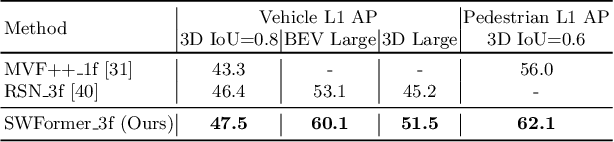
3D object detection in point clouds is a core component for modern robotics and autonomous driving systems. A key challenge in 3D object detection comes from the inherent sparse nature of point occupancy within the 3D scene. In this paper, we propose Sparse Window Transformer (SWFormer ), a scalable and accurate model for 3D object detection, which can take full advantage of the sparsity of point clouds. Built upon the idea of window-based Transformers, SWFormer converts 3D points into sparse voxels and windows, and then processes these variable-length sparse windows efficiently using a bucketing scheme. In addition to self-attention within each spatial window, our SWFormer also captures cross-window correlation with multi-scale feature fusion and window shifting operations. To further address the unique challenge of detecting 3D objects accurately from sparse features, we propose a new voxel diffusion technique. Experimental results on the Waymo Open Dataset show our SWFormer achieves state-of-the-art 73.36 L2 mAPH on vehicle and pedestrian for 3D object detection on the official test set, outperforming all previous single-stage and two-stage models, while being much more efficient.
LidarNAS: Unifying and Searching Neural Architectures for 3D Point Clouds
Oct 10, 2022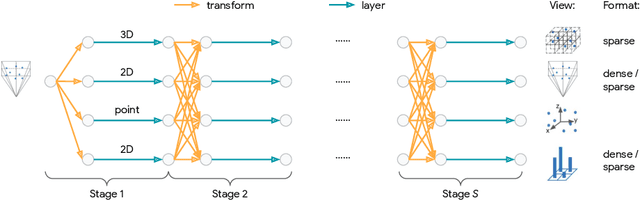
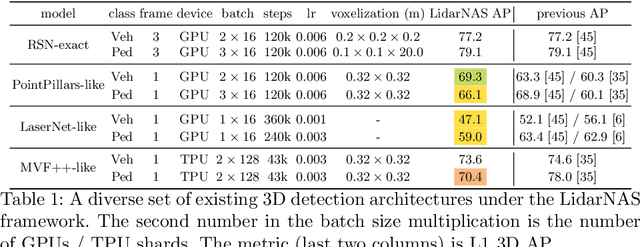

Developing neural models that accurately understand objects in 3D point clouds is essential for the success of robotics and autonomous driving. However, arguably due to the higher-dimensional nature of the data (as compared to images), existing neural architectures exhibit a large variety in their designs, including but not limited to the views considered, the format of the neural features, and the neural operations used. Lack of a unified framework and interpretation makes it hard to put these designs in perspective, as well as systematically explore new ones. In this paper, we begin by proposing a unified framework of such, with the key idea being factorizing the neural networks into a series of view transforms and neural layers. We demonstrate that this modular framework can reproduce a variety of existing works while allowing a fair comparison of backbone designs. Then, we show how this framework can easily materialize into a concrete neural architecture search (NAS) space, allowing a principled NAS-for-3D exploration. In performing evolutionary NAS on the 3D object detection task on the Waymo Open Dataset, not only do we outperform the state-of-the-art models, but also report the interesting finding that NAS tends to discover the same macro-level architecture concept for both the vehicle and pedestrian classes.
PolyLoss: A Polynomial Expansion Perspective of Classification Loss Functions
Apr 26, 2022
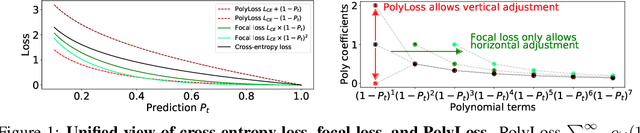

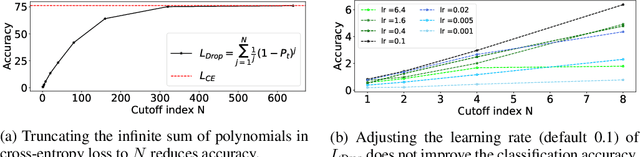
Cross-entropy loss and focal loss are the most common choices when training deep neural networks for classification problems. Generally speaking, however, a good loss function can take on much more flexible forms, and should be tailored for different tasks and datasets. Motivated by how functions can be approximated via Taylor expansion, we propose a simple framework, named PolyLoss, to view and design loss functions as a linear combination of polynomial functions. Our PolyLoss allows the importance of different polynomial bases to be easily adjusted depending on the targeting tasks and datasets, while naturally subsuming the aforementioned cross-entropy loss and focal loss as special cases. Extensive experimental results show that the optimal choice within the PolyLoss is indeed dependent on the task and dataset. Simply by introducing one extra hyperparameter and adding one line of code, our Poly-1 formulation outperforms the cross-entropy loss and focal loss on 2D image classification, instance segmentation, object detection, and 3D object detection tasks, sometimes by a large margin.
Revisiting Multi-Scale Feature Fusion for Semantic Segmentation
Mar 23, 2022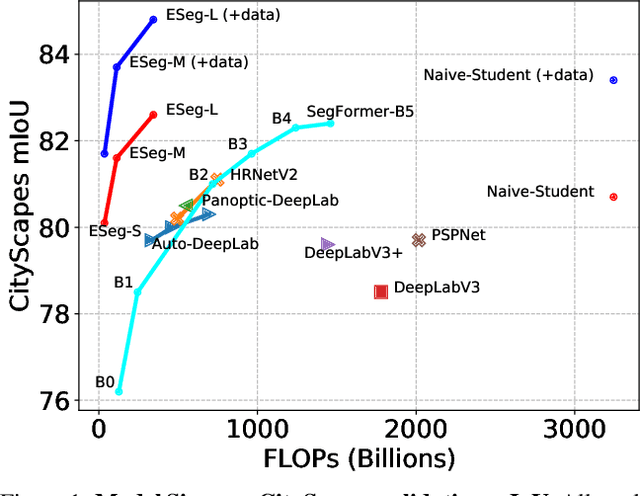
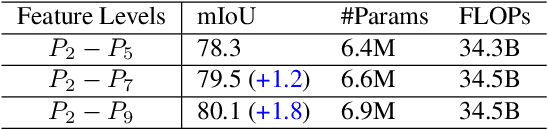
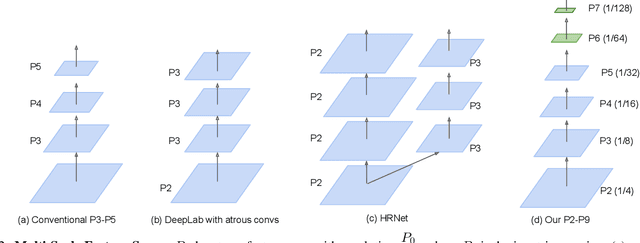
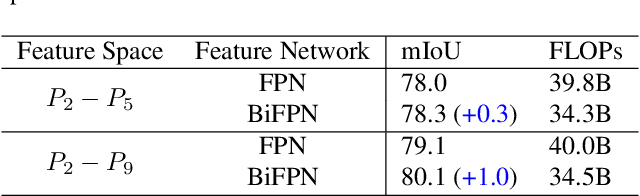
It is commonly believed that high internal resolution combined with expensive operations (e.g. atrous convolutions) are necessary for accurate semantic segmentation, resulting in slow speed and large memory usage. In this paper, we question this belief and demonstrate that neither high internal resolution nor atrous convolutions are necessary. Our intuition is that although segmentation is a dense per-pixel prediction task, the semantics of each pixel often depend on both nearby neighbors and far-away context; therefore, a more powerful multi-scale feature fusion network plays a critical role. Following this intuition, we revisit the conventional multi-scale feature space (typically capped at P5) and extend it to a much richer space, up to P9, where the smallest features are only 1/512 of the input size and thus have very large receptive fields. To process such a rich feature space, we leverage the recent BiFPN to fuse the multi-scale features. Based on these insights, we develop a simplified segmentation model, named ESeg, which has neither high internal resolution nor expensive atrous convolutions. Perhaps surprisingly, our simple method can achieve better accuracy with faster speed than prior art across multiple datasets. In real-time settings, ESeg-Lite-S achieves 76.0% mIoU on CityScapes [12] at 189 FPS, outperforming FasterSeg [9] (73.1% mIoU at 170 FPS). Our ESeg-Lite-L runs at 79 FPS and achieves 80.1% mIoU, largely closing the gap between real-time and high-performance segmentation models.
DeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection
Mar 15, 2022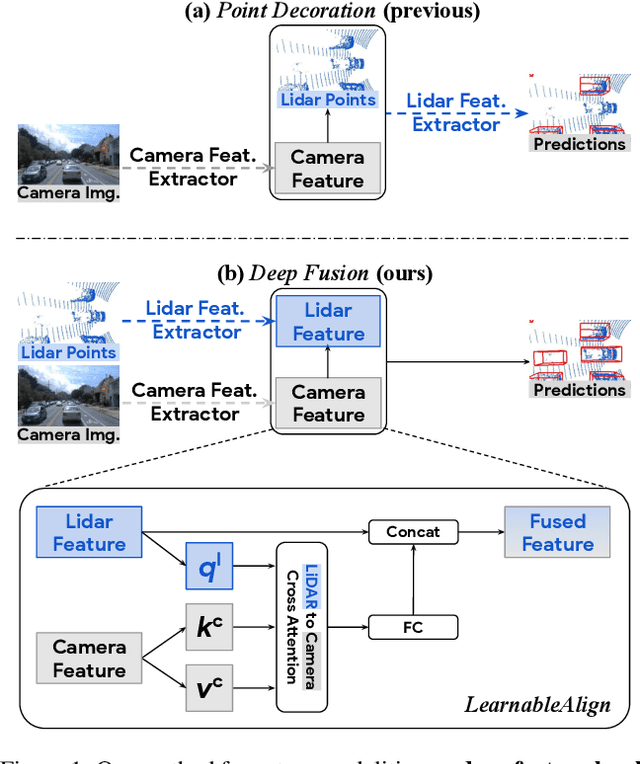
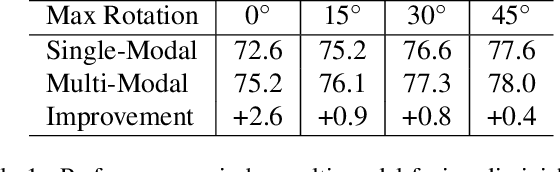
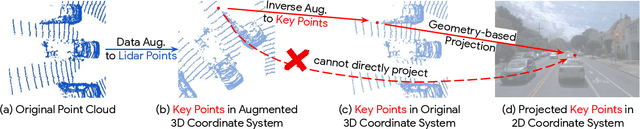
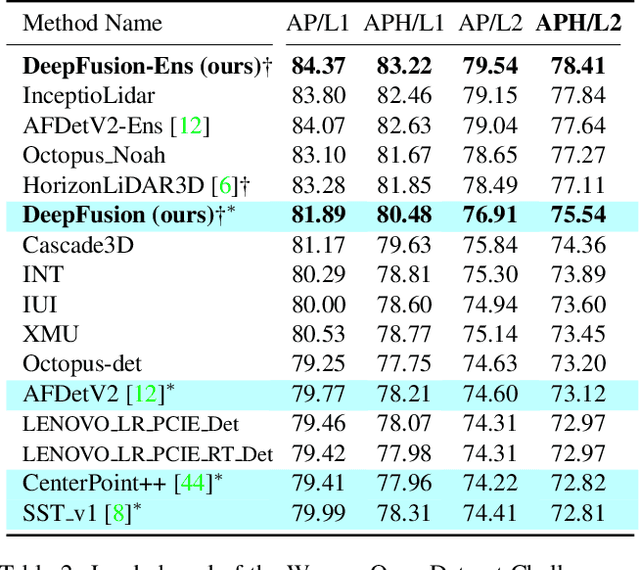
Lidars and cameras are critical sensors that provide complementary information for 3D detection in autonomous driving. While prevalent multi-modal methods simply decorate raw lidar point clouds with camera features and feed them directly to existing 3D detection models, our study shows that fusing camera features with deep lidar features instead of raw points, can lead to better performance. However, as those features are often augmented and aggregated, a key challenge in fusion is how to effectively align the transformed features from two modalities. In this paper, we propose two novel techniques: InverseAug that inverses geometric-related augmentations, e.g., rotation, to enable accurate geometric alignment between lidar points and image pixels, and LearnableAlign that leverages cross-attention to dynamically capture the correlations between image and lidar features during fusion. Based on InverseAug and LearnableAlign, we develop a family of generic multi-modal 3D detection models named DeepFusion, which is more accurate than previous methods. For example, DeepFusion improves PointPillars, CenterPoint, and 3D-MAN baselines on Pedestrian detection for 6.7, 8.9, and 6.2 LEVEL_2 APH, respectively. Notably, our models achieve state-of-the-art performance on Waymo Open Dataset, and show strong model robustness against input corruptions and out-of-distribution data. Code will be publicly available at https://github.com/tensorflow/lingvo/tree/master/lingvo/.
Occupancy Flow Fields for Motion Forecasting in Autonomous Driving
Mar 08, 2022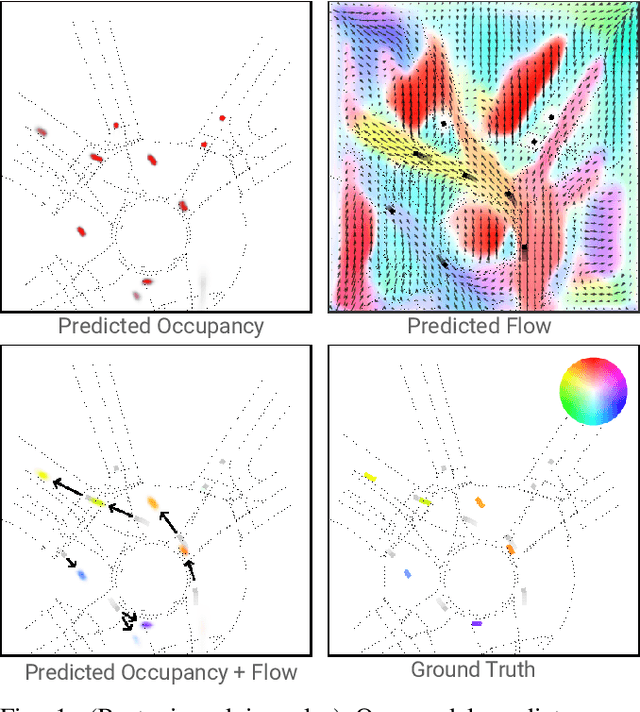
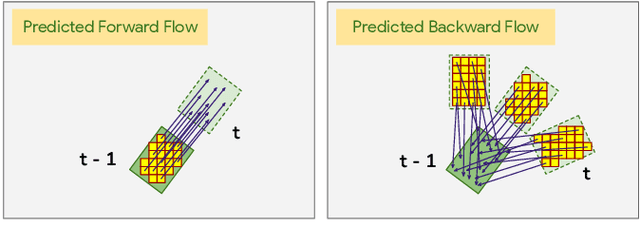
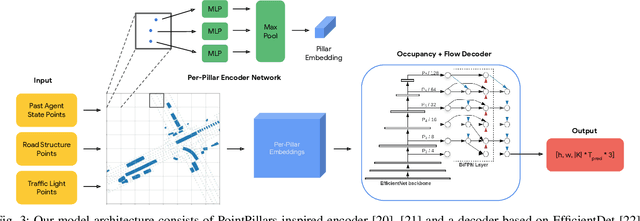
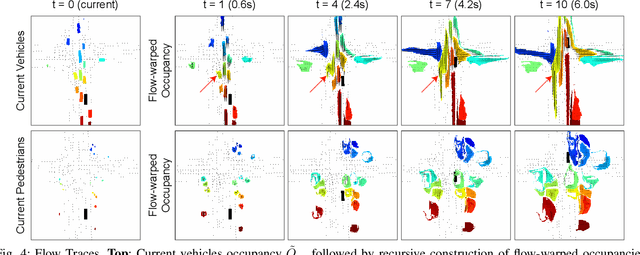
We propose Occupancy Flow Fields, a new representation for motion forecasting of multiple agents, an important task in autonomous driving. Our representation is a spatio-temporal grid with each grid cell containing both the probability of the cell being occupied by any agent, and a two-dimensional flow vector representing the direction and magnitude of the motion in that cell. Our method successfully mitigates shortcomings of the two most commonly-used representations for motion forecasting: trajectory sets and occupancy grids. Although occupancy grids efficiently represent the probabilistic location of many agents jointly, they do not capture agent motion and lose the agent identities. To this end, we propose a deep learning architecture that generates Occupancy Flow Fields with the help of a new flow trace loss that establishes consistency between the occupancy and flow predictions. We demonstrate the effectiveness of our approach using three metrics on occupancy prediction, motion estimation, and agent ID recovery. In addition, we introduce the problem of predicting speculative agents, which are currently-occluded agents that may appear in the future through dis-occlusion or by entering the field of view. We report experimental results on a large in-house autonomous driving dataset and the public INTERACTION dataset, and show that our model outperforms state-of-the-art models.
Combined Scaling for Zero-shot Transfer Learning
Nov 19, 2021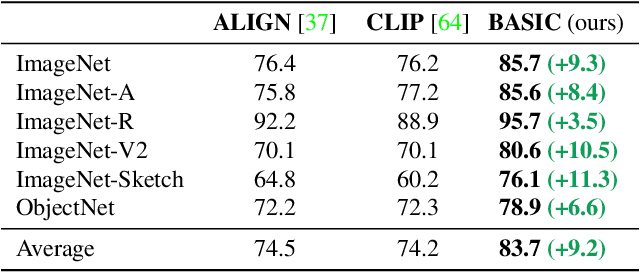
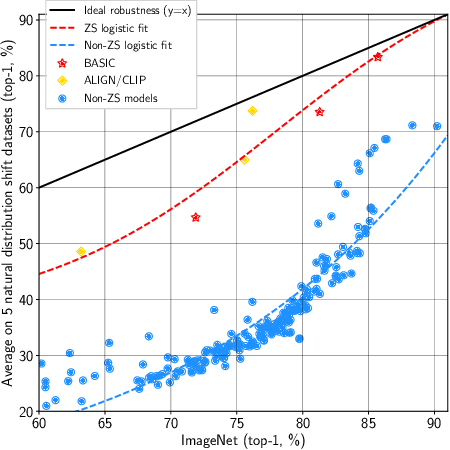

We present a combined scaling method called BASIC that achieves 85.7% top-1 zero-shot accuracy on the ImageNet ILSVRC-2012 validation set, surpassing the best-published zero-shot models - CLIP and ALIGN - by 9.3%. Our BASIC model also shows significant improvements in robustness benchmarks. For instance, on 5 test sets with natural distribution shifts such as ImageNet-{A,R,V2,Sketch} and ObjectNet, our model achieves 83.7% top-1 average accuracy, only a small drop from the its original ImageNet accuracy. To achieve these results, we scale up the contrastive learning framework of CLIP and ALIGN in three dimensions: data size, model size, and batch size. Our dataset has 6.6B noisy image-text pairs, which is 4x larger than ALIGN, and 16x larger than CLIP. Our largest model has 3B weights, which is 3.75x larger in parameters and 8x larger in FLOPs than ALIGN and CLIP. Our batch size is 65536 which is 2x more than CLIP and 4x more than ALIGN. The main challenge with scaling is the limited memory of our accelerators such as GPUs and TPUs. We hence propose a simple method of online gradient caching to overcome this limit.
CoAtNet: Marrying Convolution and Attention for All Data Sizes
Jun 09, 2021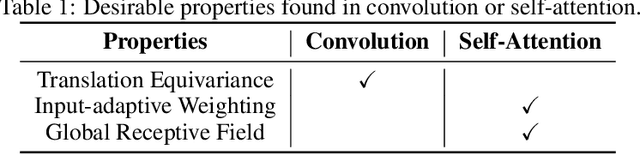
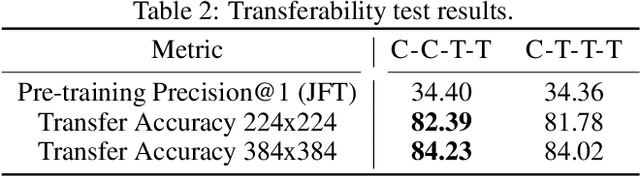
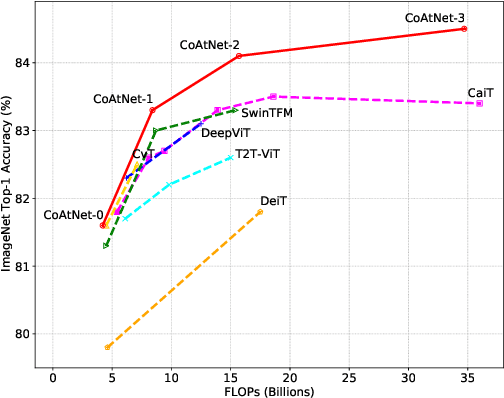
Transformers have attracted increasing interests in computer vision, but they still fall behind state-of-the-art convolutional networks. In this work, we show that while Transformers tend to have larger model capacity, their generalization can be worse than convolutional networks due to the lack of the right inductive bias. To effectively combine the strengths from both architectures, we present CoAtNets(pronounced "coat" nets), a family of hybrid models built from two key insights:(1) depthwise Convolution and self-Attention can be naturally unified via simple relative attention; (2) vertically stacking convolution layers and attention layers in a principled way is surprisingly effective in improving generalization, capacity and efficiency. Experiments show that our CoAtNets achieve state-of-the-art performance under different resource constraints across various datasets. For example, CoAtNet achieves 86.0% ImageNet top-1 accuracy without extra data, and 89.77% with extra JFT data, outperforming prior arts of both convolutional networks and Transformers. Notably, when pre-trained with 13M images fromImageNet-21K, our CoAtNet achieves 88.56% top-1 accuracy, matching ViT-huge pre-trained with 300M images from JFT while using 23x less data.
MoViNets: Mobile Video Networks for Efficient Video Recognition
Apr 18, 2021



We present Mobile Video Networks (MoViNets), a family of computation and memory efficient video networks that can operate on streaming video for online inference. 3D convolutional neural networks (CNNs) are accurate at video recognition but require large computation and memory budgets and do not support online inference, making them difficult to work on mobile devices. We propose a three-step approach to improve computational efficiency while substantially reducing the peak memory usage of 3D CNNs. First, we design a video network search space and employ neural architecture search to generate efficient and diverse 3D CNN architectures. Second, we introduce the Stream Buffer technique that decouples memory from video clip duration, allowing 3D CNNs to embed arbitrary-length streaming video sequences for both training and inference with a small constant memory footprint. Third, we propose a simple ensembling technique to improve accuracy further without sacrificing efficiency. These three progressive techniques allow MoViNets to achieve state-of-the-art accuracy and efficiency on the Kinetics, Moments in Time, and Charades video action recognition datasets. For instance, MoViNet-A5-Stream achieves the same accuracy as X3D-XL on Kinetics 600 while requiring 80% fewer FLOPs and 65% less memory. Code will be made available at https://github.com/tensorflow/models/tree/master/official/vision.
EfficientNetV2: Smaller Models and Faster Training
Apr 01, 2021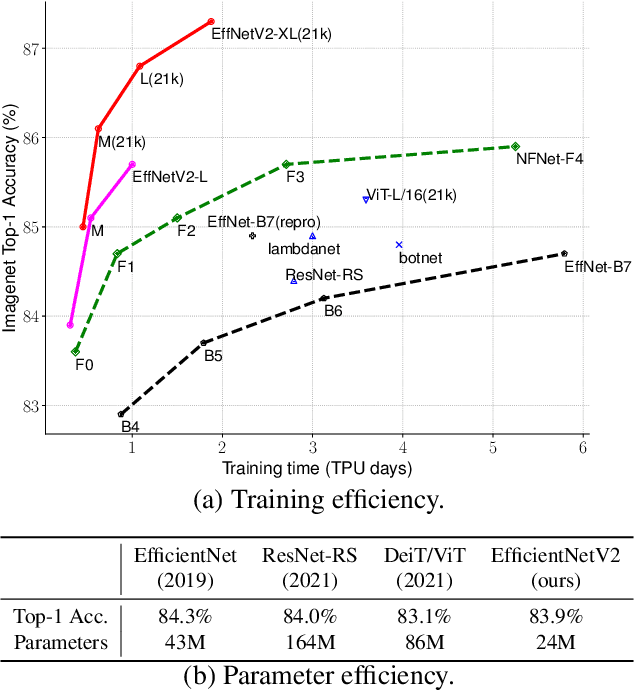
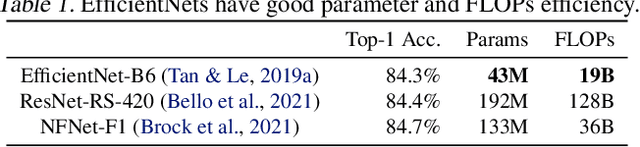
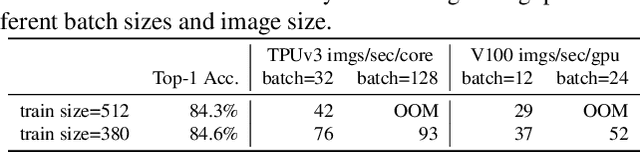
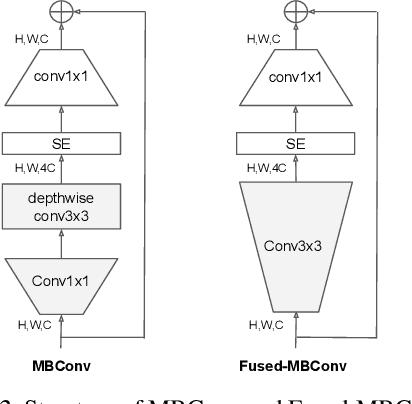
This paper introduces EfficientNetV2, a new family of convolutional networks that have faster training speed and better parameter efficiency than previous models. To develop this family of models, we use a combination of training-aware neural architecture search and scaling, to jointly optimize training speed and parameter efficiency. The models were searched from the search space enriched with new ops such as Fused-MBConv. Our experiments show that EfficientNetV2 models train much faster than state-of-the-art models while being up to 6.8x smaller. Our training can be further sped up by progressively increasing the image size during training, but it often causes a drop in accuracy. To compensate for this accuracy drop, we propose to adaptively adjust regularization (e.g., dropout and data augmentation) as well, such that we can achieve both fast training and good accuracy. With progressive learning, our EfficientNetV2 significantly outperforms previous models on ImageNet and CIFAR/Cars/Flowers datasets. By pretraining on the same ImageNet21k, our EfficientNetV2 achieves 87.3% top-1 accuracy on ImageNet ILSVRC2012, outperforming the recent ViT by 2.0% accuracy while training 5x-11x faster using the same computing resources. Code will be available at https://github.com/google/automl/efficientnetv2.