 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"What, not how": Solving an under-actuated insertion task from scratch
Oct 30, 2020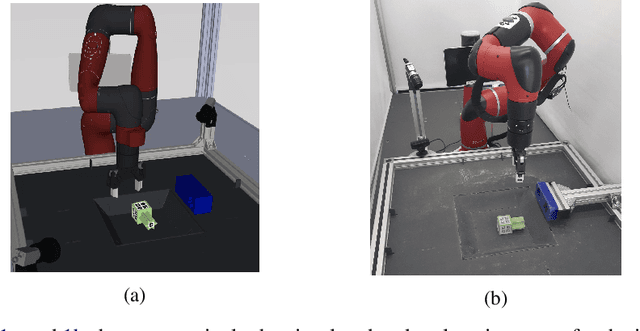
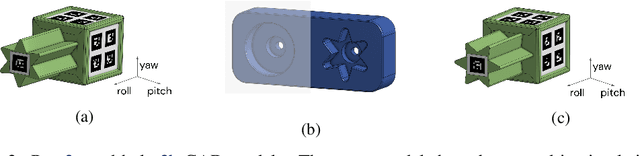
Robot manipulation requires a complex set of skills that need to be carefully combined and coordinated to solve a task. Yet, most ReinforcementLearning (RL) approaches in robotics study tasks which actually consist only of a single manipulation skill, such as grasping an object or inserting a pre-grasped object. As a result the skill ('how' to solve the task) but not the actual goal of a complete manipulation ('what' to solve) is specified. In contrast, we study a complex manipulation goal that requires an agent to learn and combine diverse manipulation skills. We propose a challenging, highly under-actuated peg-in-hole task with a free, rotational asymmetrical peg, requiring a broad range of manipulation skills. While correct peg (re-)orientation is a requirement for successful insertion, there is no reward associated with it. Hence an agent needs to understand this pre-condition and learn the skill to fulfil it. The final insertion reward is sparse, allowing freedom in the solution and leading to complex emerging behaviour not envisioned during the task design. We tackle the problem in a multi-task RL framework using Scheduled Auxiliary Control (SAC-X) combined with Regularized Hierarchical Policy Optimization (RHPO) which successfully solves the task in simulation and from scratch on a single robot where data is severely limited.
Towards General and Autonomous Learning of Core Skills: A Case Study in Locomotion
Aug 06, 2020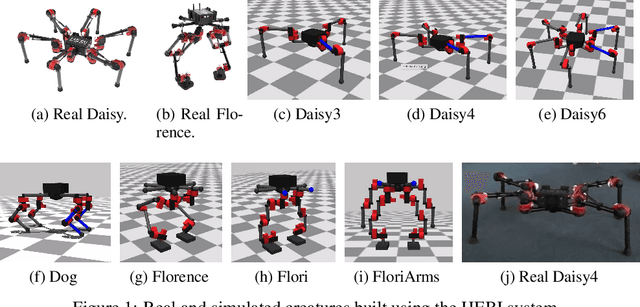
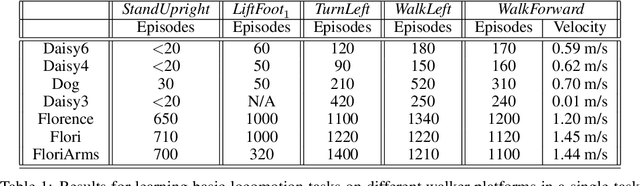
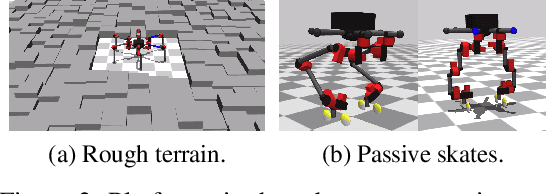
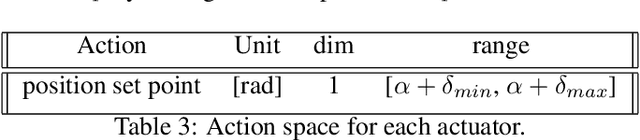
Modern Reinforcement Learning (RL) algorithms promise to solve difficult motor control problems directly from raw sensory inputs. Their attraction is due in part to the fact that they can represent a general class of methods that allow to learn a solution with a reasonably set reward and minimal prior knowledge, even in situations where it is difficult or expensive for a human expert. For RL to truly make good on this promise, however, we need algorithms and learning setups that can work across a broad range of problems with minimal problem specific adjustments or engineering. In this paper, we study this idea of generality in the locomotion domain. We develop a learning framework that can learn sophisticated locomotion behavior for a wide spectrum of legged robots, such as bipeds, tripeds, quadrupeds and hexapods, including wheeled variants. Our learning framework relies on a data-efficient, off-policy multi-task RL algorithm and a small set of reward functions that are semantically identical across robots. To underline the general applicability of the method, we keep the hyper-parameter settings and reward definitions constant across experiments and rely exclusively on on-board sensing. For nine different types of robots, including a real-world quadruped robot, we demonstrate that the same algorithm can rapidly learn diverse and reusable locomotion skills without any platform specific adjustments or additional instrumentation of the learning setup.
Data-efficient Hindsight Off-policy Option Learning
Jul 30, 2020
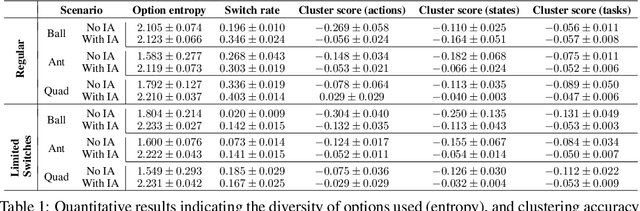

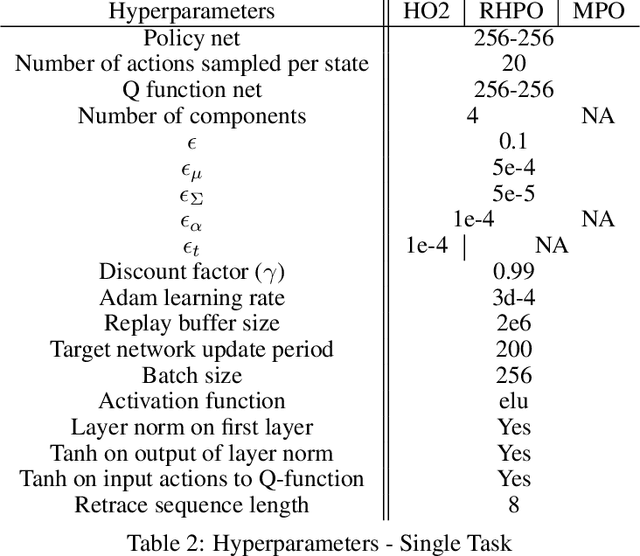
Solutions to most complex tasks can be decomposed into simpler, intermediate skills, reusable across wider ranges of problems. We follow this concept and introduce Hindsight Off-policy Options (HO2), a new algorithm for efficient and robust option learning. The algorithm relies on critic-weighted maximum likelihood estimation and an efficient dynamic programming inference procedure over off-policy trajectories. We can backpropagate through the inference procedure through time and the policy components for every time-step, making it possible to train all component's parameters off-policy, independently of the data-generating behavior policy. Experimentally, we demonstrate that HO2 outperforms competitive baselines and solves demanding robot stacking and ball-in-cup tasks from raw pixel inputs in simulation. We further compare autoregressive option policies with simple mixture policies, providing insights into the relative impact of two types of abstractions common in the options framework: action abstraction and temporal abstraction. Finally, we illustrate challenges caused by stale data in off-policy options learning and provide effective solutions.
Simple Sensor Intentions for Exploration
May 15, 2020
Modern reinforcement learning algorithms can learn solutions to increasingly difficult control problems while at the same time reduce the amount of prior knowledge needed for their application. One of the remaining challenges is the definition of reward schemes that appropriately facilitate exploration without biasing the solution in undesirable ways, and that can be implemented on real robotic systems without expensive instrumentation. In this paper we focus on a setting in which goal tasks are defined via simple sparse rewards, and exploration is facilitated via agent-internal auxiliary tasks. We introduce the idea of simple sensor intentions (SSIs) as a generic way to define auxiliary tasks. SSIs reduce the amount of prior knowledge that is required to define suitable rewards. They can further be computed directly from raw sensor streams and thus do not require expensive and possibly brittle state estimation on real systems. We demonstrate that a learning system based on these rewards can solve complex robotic tasks in simulation and in real world settings. In particular, we show that a real robotic arm can learn to grasp and lift and solve a Ball-in-a-Cup task from scratch, when only raw sensor streams are used for both controller input and in the auxiliary reward definition.
Continuous-Discrete Reinforcement Learning for Hybrid Control in Robotics
Jan 02, 2020

Many real-world control problems involve both discrete decision variables - such as the choice of control modes, gear switching or digital outputs - as well as continuous decision variables - such as velocity setpoints, control gains or analogue outputs. However, when defining the corresponding optimal control or reinforcement learning problem, it is commonly approximated with fully continuous or fully discrete action spaces. These simplifications aim at tailoring the problem to a particular algorithm or solver which may only support one type of action space. Alternatively, expert heuristics are used to remove discrete actions from an otherwise continuous space. In contrast, we propose to treat hybrid problems in their 'native' form by solving them with hybrid reinforcement learning, which optimizes for discrete and continuous actions simultaneously. In our experiments, we first demonstrate that the proposed approach efficiently solves such natively hybrid reinforcement learning problems. We then show, both in simulation and on robotic hardware, the benefits of removing possibly imperfect expert-designed heuristics. Lastly, hybrid reinforcement learning encourages us to rethink problem definitions. We propose reformulating control problems, e.g. by adding meta actions, to improve exploration or reduce mechanical wear and tear.
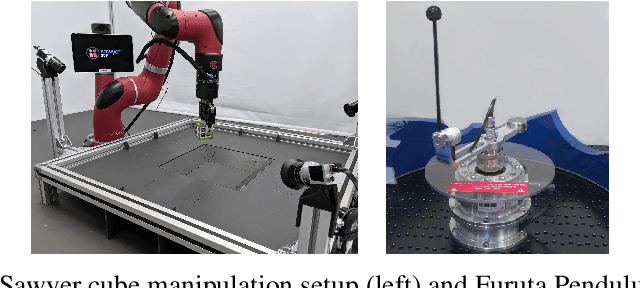
Disentangled Cumulants Help Successor Representations Transfer to New Tasks
Nov 25, 2019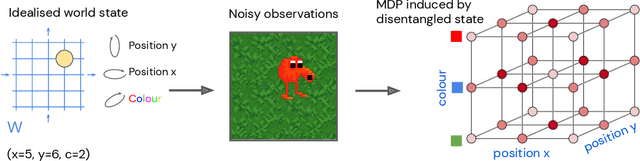
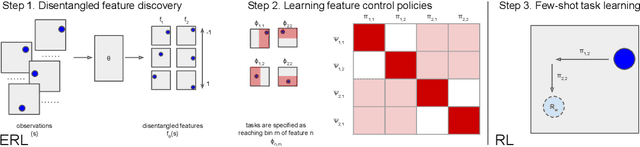
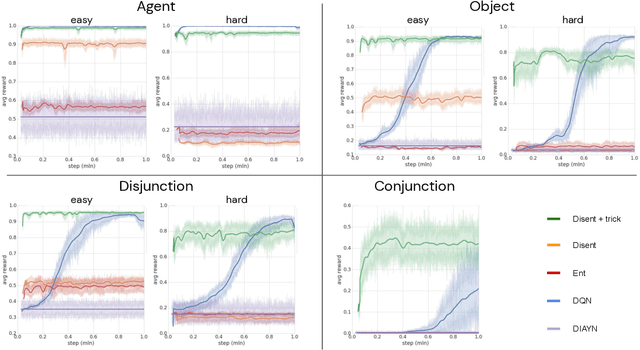
Biological intelligence can learn to solve many diverse tasks in a data efficient manner by re-using basic knowledge and skills from one task to another. Furthermore, many of such skills are acquired without explicit supervision in an intrinsically driven fashion. This is in contrast to the state-of-the-art reinforcement learning agents, which typically start learning each new task from scratch and struggle with knowledge transfer. In this paper we propose a principled way to learn a basis set of policies, which, when recombined through generalised policy improvement, come with guarantees on the coverage of the final task space. In particular, we concentrate on solving goal-based downstream tasks where the execution order of actions is not important. We demonstrate both theoretically and empirically that learning a small number of policies that reach intrinsically specified goal regions in a disentangled latent space can be re-used to quickly achieve a high level of performance on an exponentially larger number of externally specified, often significantly more complex downstream tasks. Our learning pipeline consists of two stages. First, the agent learns to perform intrinsically generated, goal-based tasks in the total absence of environmental rewards. Second, the agent leverages this experience to quickly achieve a high level of performance on numerous diverse externally specified tasks.
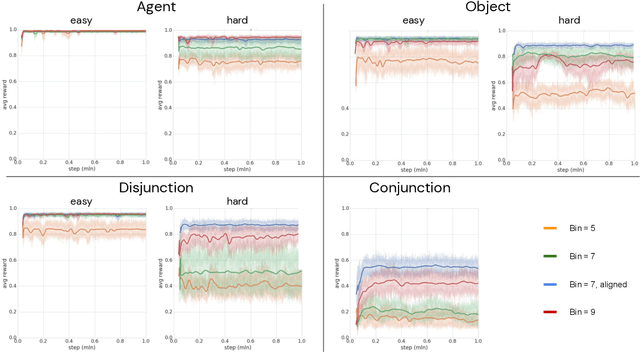
Attention Privileged Reinforcement Learning For Domain Transfer
Nov 19, 2019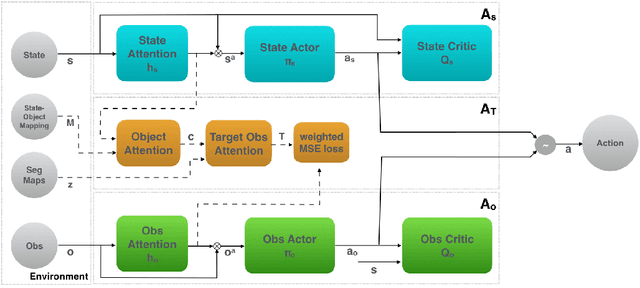
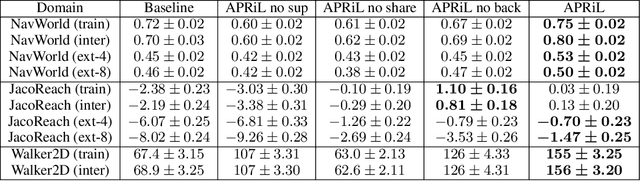
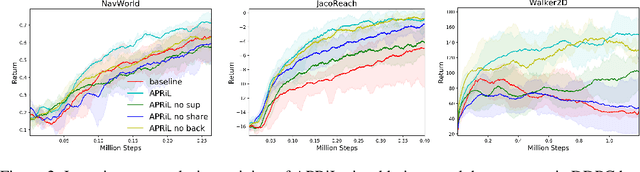
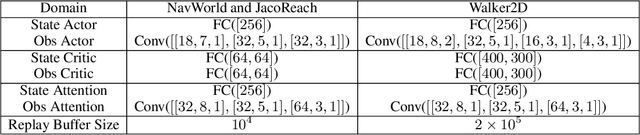
Applying reinforcement learning (RL) to physical systems presents notable challenges, given requirements regarding sample efficiency, safety, and physical constraints compared to simulated environments. To enable transfer of policies trained in simulation, randomising simulation parameters leads to more robust policies, but also significantly extends training time. In this paper, we exploit access to privileged information (such as environment states) often available in simulation, in order to improve and accelerate learning over randomised environments. We introduce Attention Privileged Reinforcement Learning (APRiL), which equips the agent with an attention mechanism and makes use of state information in simulation, learning to align attention between state- and image-based policies while additionally sharing generated data. During deployment we can apply the image-based policy to remove the requirement of access to additional information. We experimentally demonstrate accelerated and more robust learning on a number of diverse domains, leading to improved final performance for environments both within and outside the training distribution.
Regularized Hierarchical Policies for Compositional Transfer in Robotics
Jun 27, 2019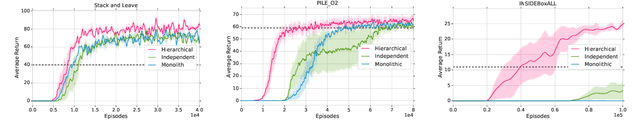
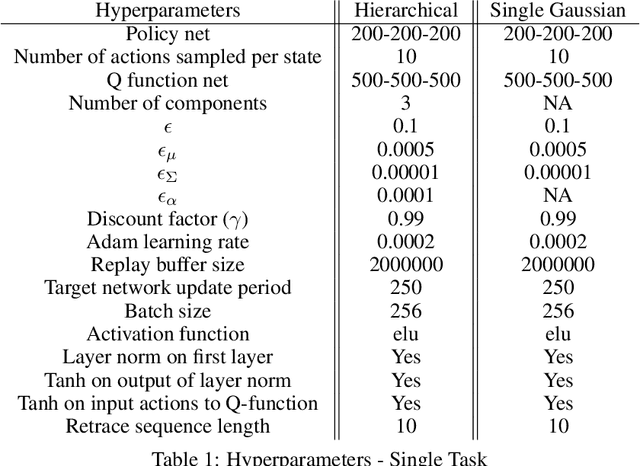
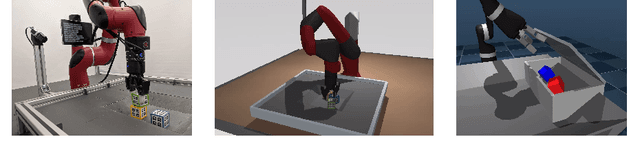
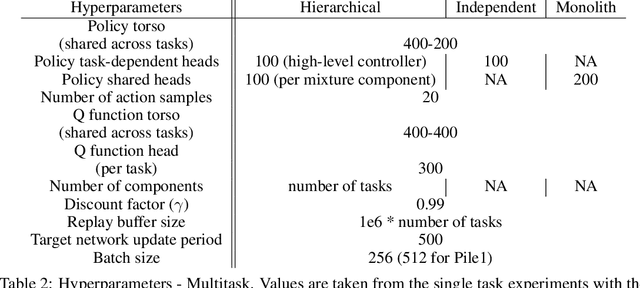
The successful application of flexible, general learning algorithms -- such as deep reinforcement learning -- to real-world robotics applications is often limited by their poor data-efficiency. Domains with more than a single dominant task of interest encourage algorithms that share partial solutions across tasks to limit the required experiment time. We develop and investigate simple hierarchical inductive biases -- in the form of structured policies -- as a mechanism for knowledge transfer across tasks in reinforcement learning (RL). To leverage the power of these structured policies we design an RL algorithm that enables stable and fast learning. We demonstrate the success of our method both in simulated robot environments (using locomotion and manipulation domains) as well as real robot experiments, demonstrating substantially better data-efficiency than competitive baselines.
Efficient Supervision for Robot Learning via Imitation, Simulation, and Adaptation
Apr 15, 2019
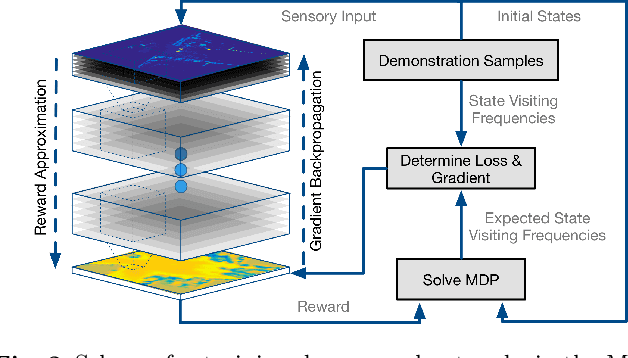
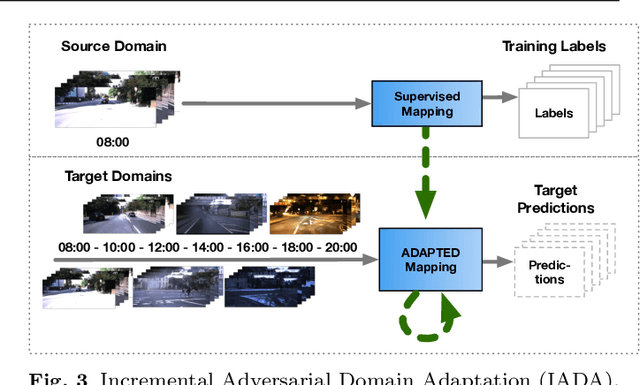
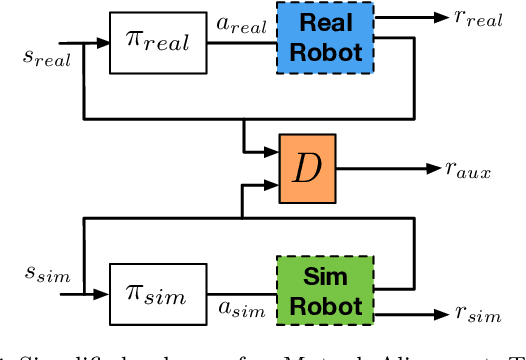
Recent successes in machine learning have led to a shift in the design of autonomous systems, improving performance on existing tasks and rendering new applications possible. Data-focused approaches gain relevance across diverse, intricate applications when developing data collection and curation pipelines becomes more effective than manual behaviour design. The following work aims at increasing the efficiency of this pipeline in two principal ways: by utilising more powerful sources of informative data and by extracting additional information from existing data. In particular, we target three orthogonal fronts: imitation learning, domain adaptation, and transfer from simulation.
TACO: Learning Task Decomposition via Temporal Alignment for Control
Aug 10, 2018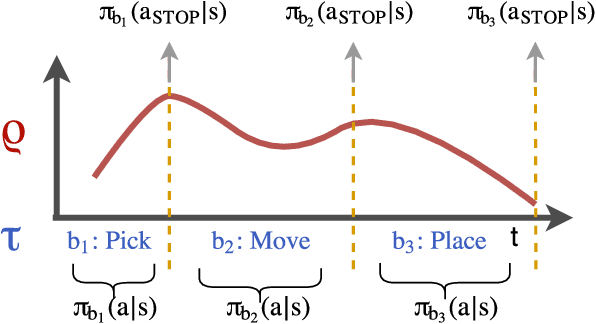
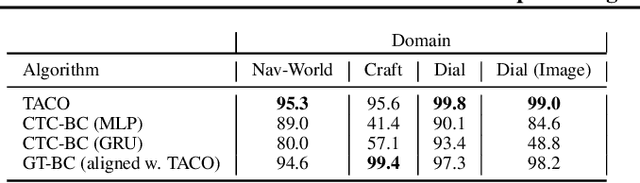
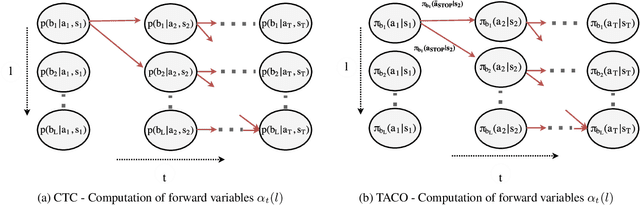
Many advanced Learning from Demonstration (LfD) methods consider the decomposition of complex, real-world tasks into simpler sub-tasks. By reusing the corresponding sub-policies within and between tasks, they provide training data for each policy from different high-level tasks and compose them to perform novel ones. Existing approaches to modular LfD focus either on learning a single high-level task or depend on domain knowledge and temporal segmentation. In contrast, we propose a weakly supervised, domain-agnostic approach based on task sketches, which include only the sequence of sub-tasks performed in each demonstration. Our approach simultaneously aligns the sketches with the observed demonstrations and learns the required sub-policies. This improves generalisation in comparison to separate optimisation procedures. We evaluate the approach on multiple domains, including a simulated 3D robot arm control task using purely image-based observations. The results show that our approach performs commensurately with fully supervised approaches, while requiring significantly less annotation effort.