 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeToward Achieving Formal Guarantees for Human-Aware Controllers in Human-Robot Interactions
Mar 04, 2019
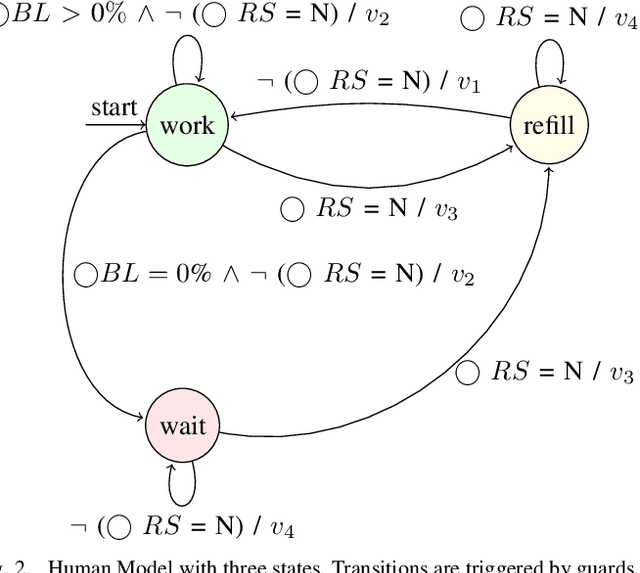
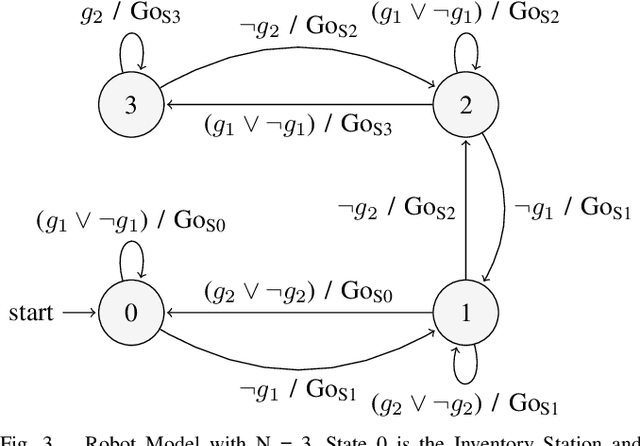
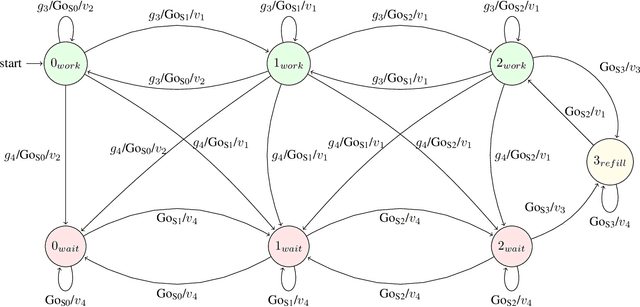
With the primary objective of human-robot interaction being to support humans' goals, there exists a need to formally synthesize robot controllers that can provide the desired service. Synthesis techniques have the benefit of providing formal guarantees for specification satisfaction. There is potential to apply these techniques for devising robot controllers whose specifications are coupled with human needs. This paper explores the use of formal methods to construct human-aware robot controllers to support the productivity requirements of humans. We tackle these types of scenarios via human workload-informed models and reactive synthesis. This strategy allows us to synthesize controllers that fulfill formal specifications that are expressed as linear temporal logic formulas. We present a case study in which we reason about a work delivery and pickup task such that the robot increases worker productivity, but not stress induced by high work backlog. We demonstrate our controller using the Toyota HSR, a mobile manipulator robot. The results demonstrate the realization of a robust robot controller that is guaranteed to properly reason and react in collaborative tasks with human partners.
A Versatile Framework for Robust and Adaptive Door Operation with a Mobile Manipulator Robot
Feb 25, 2019
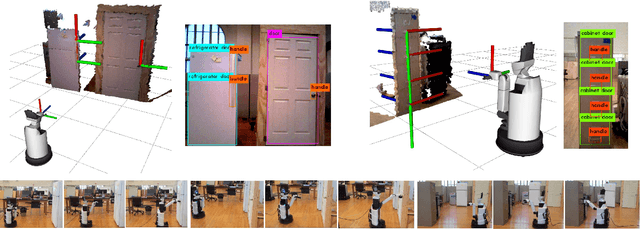
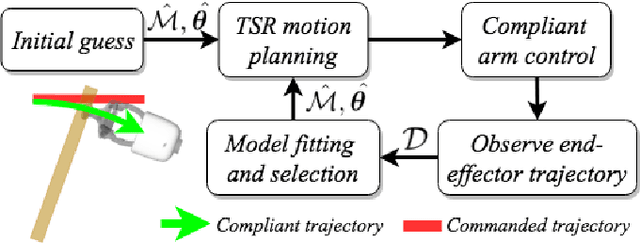
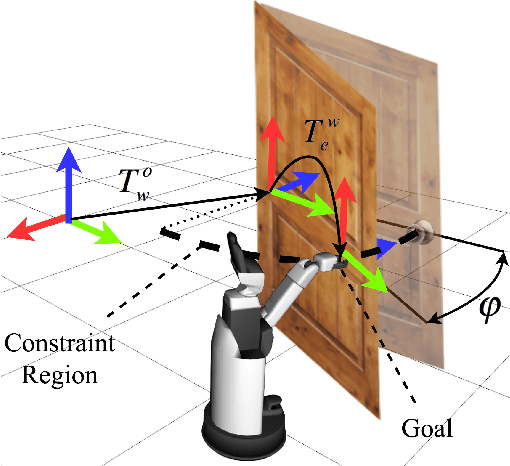
The ability to deal with articulated objects is very important for robots assisting humans. In this work a general framework for the robust operation of different types of doors using an autonomous robotic mobile manipulator is proposed. To push the state-of-the-art in robustness and speed performance, we devise a novel algorithm that fuses a convolutional neural network with efficient point cloud processing. This advancement allows for real-time grasping pose estimation of single or multiple handles from RGB-D images, providing a speed up for assistive human-centered behaviors. In addition, we propose a versatile Bayesian framework that endows the robot with the ability to infer the door kinematic model from observations of its motion while opening it and learn from previous experiences or human demonstrations. Combining this probabilistic approach with a state-of-the-art motion planner, we achieve efficient door grasping and subsequent door operation regardless of the kinematic model using the Toyota Human Support Robot.
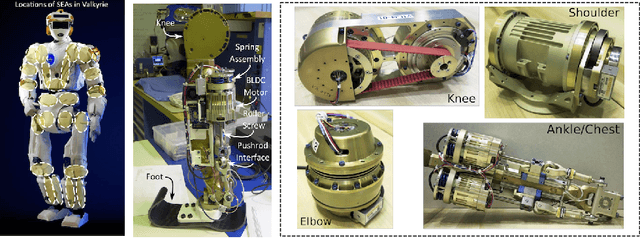
Thermal Recovery of Multi-Limbed Robots with Electric Actuators
Feb 04, 2019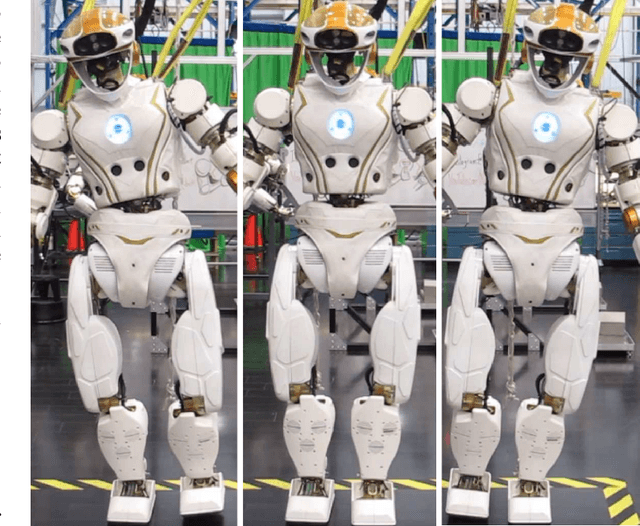
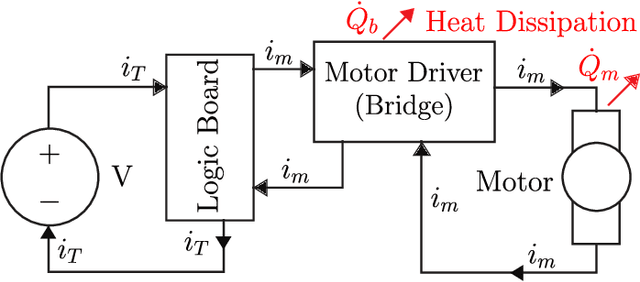
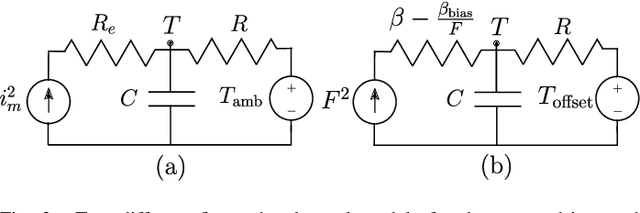
The problem of finding thermally minimizing configurations of a humanoid robot to recover its actuators from unsafe thermal states is addressed. A first-order, data-driven, effort-based, thermal model of the robot's actuators is devised, which is used to predict future thermal states. Given this predictive capability, a map between configurations and future temperatures is formulated to find what configurations, subject to valid contact constraints, can be taken now to minimize future thermal states. Effectively, this approach is a realization of a contact-constrained thermal inverse-kinematics (IK) process. Experimental validation of the proposed approach is performed on the NASA Valkyrie robot hardware.
Robot Economy: Ready or Not, Here It Comes
Jan 20, 2019
Automation is not a new phenomenon, and questions about its effects have long followed its advances. More than a half-century ago, US President Lyndon B. Johnson established a national commission to examine the impact of technology on the economy, declaring that automation "can be the ally of our prosperity if we will just look ahead". In this paper, our premise is that we are at a technological inflection point in which robots are developing the capacity to do greatly increase their cognitive and physical capabilities, and thus raising questions on labor dynamics. With increasing levels of autonomy and human-robot interaction, intelligent robots could soon accomplish new human-like capabilities such as engaging into social activities. Therefore, an increase in automation and autonomy capacity brings the question of robots directly participating in some economic activities as autonomous agents. In this paper, a technological framework describing a robot economy is outlined and the challenges it might represent in the current socio-economic scenario are pondered.
Distributed Impedance Control of Latency-Prone Robotic Systems with Series Elastic Actuation
Nov 27, 2018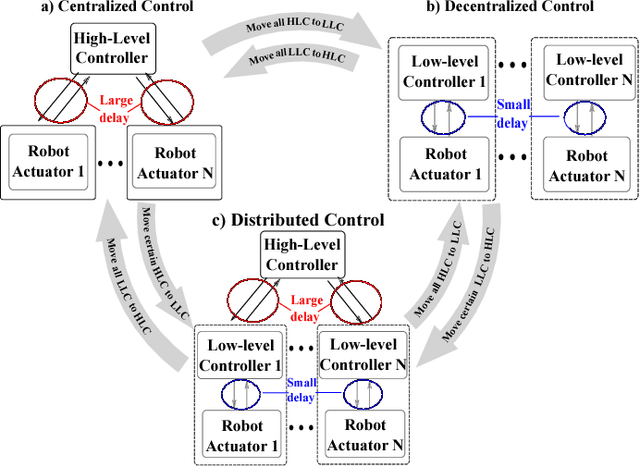
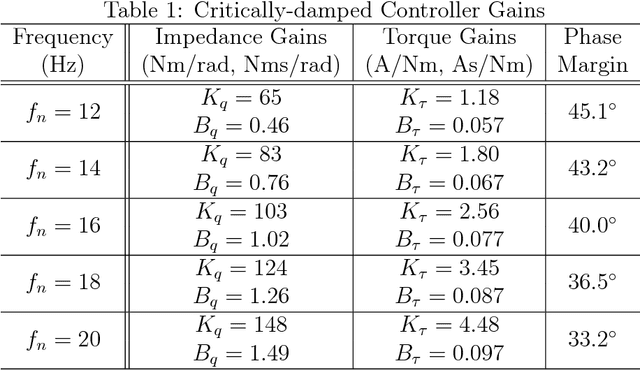
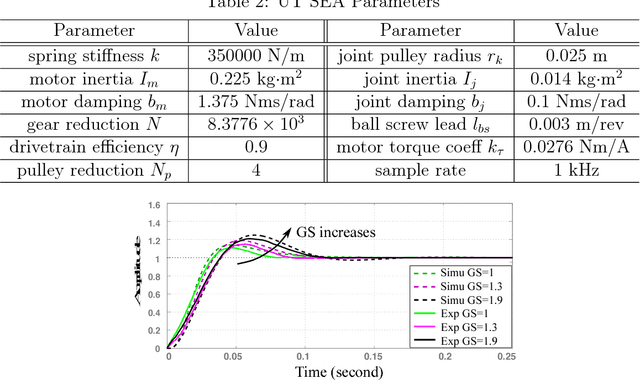
Robotic systems are increasingly relying on distributed feedback controllers to tackle complex and latency-prone sensing and decision problems. These demands come at the cost of a growing computational burden and, as a result, larger controller latencies. To maximize robustness to mechanical disturbances and achieve high control performance, we emphasize the necessity for executing damping feedback in close proximity to the control plant while allocating stiffness feedback in a latency-prone centralized control process. Additionally, series elastic actuators (SEAs) are becoming prevalent in torque-controlled robots during recent years to achieve compliant interactions with environments and humans. However, designing optimal impedance controllers and characterizing impedance performance for SEAs with time delays and filtering are still under-explored problems. The presented study addresses the optimal controller design problem by devising a critically-damped gain design method for a class of SEA cascaded control architectures, which is composed of outer-impedance and inner-torque feedback loops. Via the proposed controller design criterion, we adopt frequency-domain methods to thoroughly analyze the effects of time delays, filtering and load inertia on SEA impedance performance. These results are further validated through the analysis, simulation, and experimental testing on high-performance actuators and on an omnidirectional mobile base.
Reactive Task and Motion Planning for Robust Whole-Body Dynamic Locomotion in Constrained Environments
Nov 11, 2018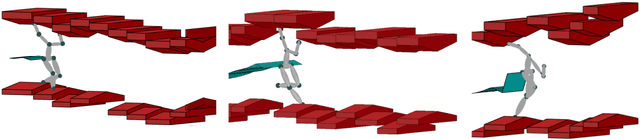

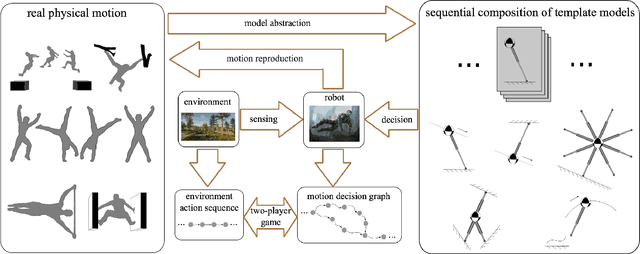
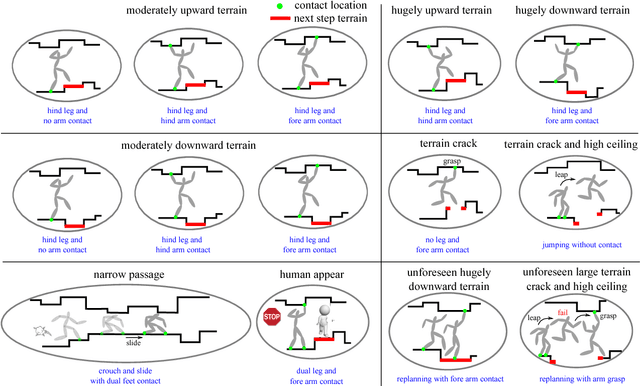
Contact-based decision and planning methods are becoming increasingly important to endow higher levels of autonomy for legged robots. Formal synthesis methods derived from symbolic systems have great potential for reasoning about high-level locomotion decisions and achieving complex maneuvering behaviors with correctness guarantees. This study takes a first step toward formally devising an architecture composed of task planning and control of whole-body dynamic locomotion behaviors in constrained and dynamically changing environments. At the high level, we formulate a two-player temporal logic game between the multi-limb locomotion planner and its dynamic environment to synthesize a winning strategy that delivers symbolic locomotion actions. These locomotion actions satisfy the desired high-level task specifications expressed in a fragment of temporal logic. Those actions are sent to a robust finite transition system that synthesizes a locomotion controller that fulfills state reachability constraints. This controller is further executed via a low-level motion planner that generates feasible locomotion trajectories. We construct a set of dynamic locomotion models for legged robots to serve as a template library for handling diverse environmental events. We devise a replanning strategy that takes into consideration sudden environmental changes or large state disturbances to increase the robustness of the resulting locomotion behaviors. We formally prove the correctness of the layered locomotion framework guaranteeing a robust implementation by the motion planning layer. Simulations of reactive locomotion behaviors in diverse environments indicate that our framework has the potential to serve as a theoretical foundation for intelligent locomotion behaviors.
LAAIR: A Layered Architecture for Autonomous Interactive Robots
Nov 09, 2018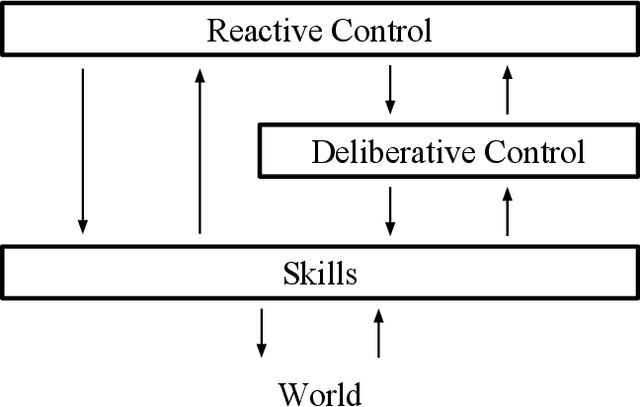
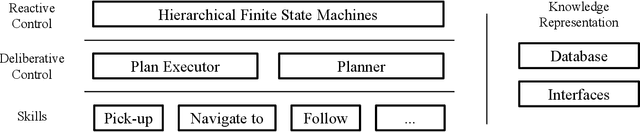
When developing general purpose robots, the overarching software architecture can greatly affect the ease of accomplishing various tasks. Initial efforts to create unified robot systems in the 1990s led to hybrid architectures, emphasizing a hierarchy in which deliberative plans direct the use of reactive skills. However, since that time there has been significant progress in the low-level skills available to robots, including manipulation and perception, making it newly feasible to accomplish many more tasks in real-world domains. There is thus renewed optimism that robots will be able to perform a wide array of tasks while maintaining responsiveness to human operators. However, the top layer in traditional hybrid architectures, designed to achieve long-term goals, can make it difficult to react quickly to human interactions during goal-driven execution. To mitigate this difficulty, we propose a novel architecture that supports such transitions by adding a top-level reactive module which has flexible access to both reactive skills and a deliberative control module. To validate this architecture, we present a case study of its application on a domestic service robot platform.
Trajectory Generation for Robotic Systems with Contact Force Constraints
Sep 27, 2018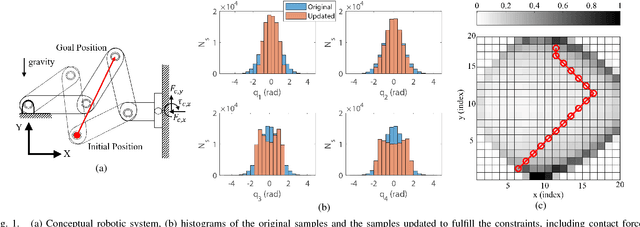
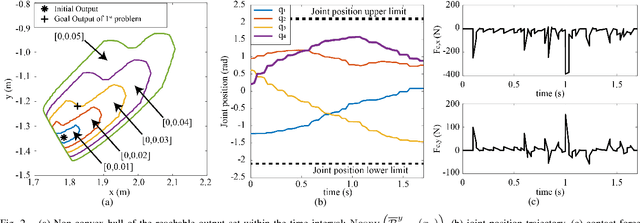
This paper presents a trajectory generation method for contact-constrained robotic systems such as manipulators and legged robots. Contact-constrained systems are affected by the interaction forces between the robot and the environment. In turn, these forces determine and constrain state reachability of the robot parts or end effectors. Our study subdivides the trajectory generation problem and the supporting reachability analysis into tractable subproblems consisting of a sampling problem, a convex optimization problem, and a nonlinear programming problem. Our method leads to significant reduction of computational cost. The proposed approach is validated using a realistic simulated contact-constrained robotic system.
An Architecture for Person-Following using Active Target Search
Sep 24, 2018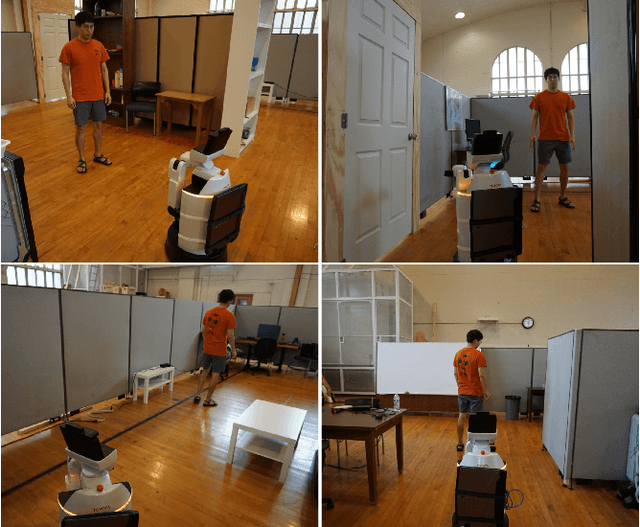
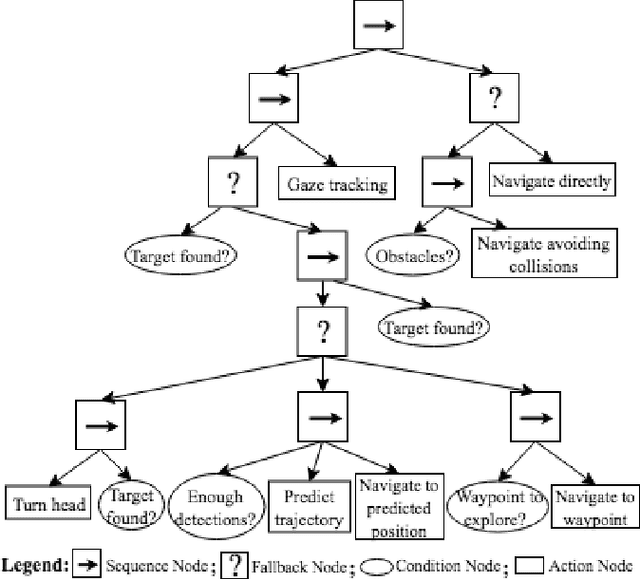
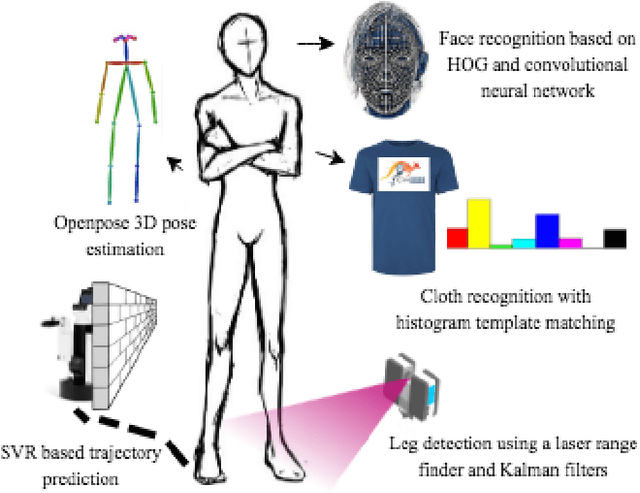
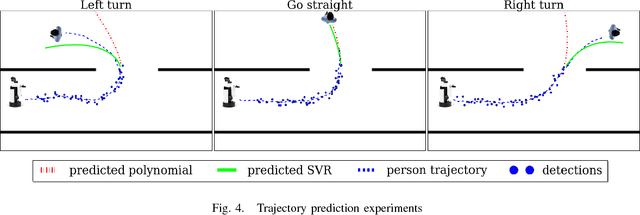
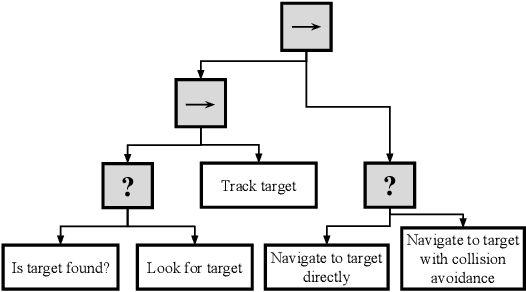
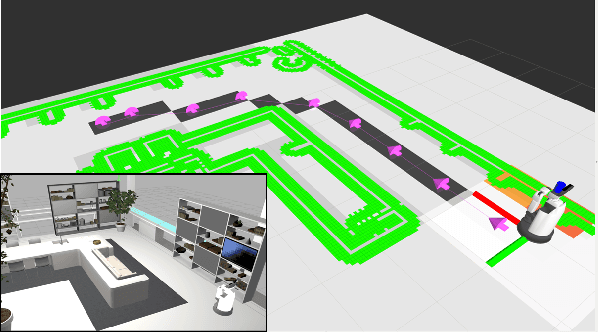
This paper addresses a novel architecture for person-following robots using active search. The proposed system can be applied in real-time to general mobile robots for learning features of a human, detecting and tracking, and finally navigating towards that person. To succeed at person-following, perception, planning, and robot behavior need to be integrated properly. Toward this end, an active target searching capability, including prediction and navigation toward vantage locations for finding human targets, is proposed. The proposed capability aims at improving the robustness and efficiency for tracking and following people under dynamic conditions such as crowded environments. A multi-modal sensor information approach including fusing an RGB-D sensor and a laser scanner, is pursued to robustly track and identify human targets. Bayesian filtering for keeping track of human and a regression algorithm to predict the trajectory of people are investigated. In order to make the robot autonomous, the proposed framework relies on a behavior-tree structure. Using Toyota Human Support Robot (HSR), real-time experiments demonstrate that the proposed architecture can generate fast, efficient person-following behaviors.
Social Navigation Planning Based on People's Awareness of Robots
Sep 24, 2018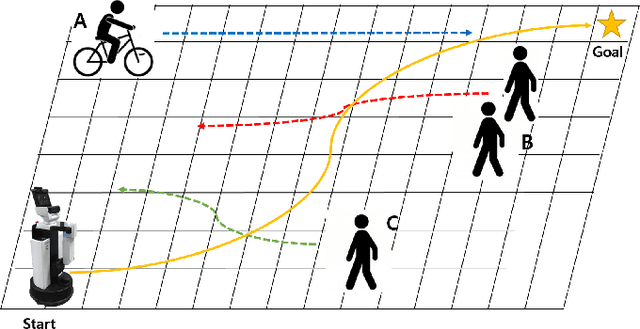
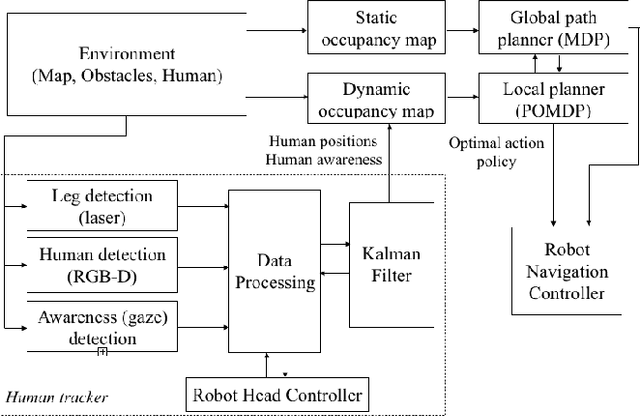
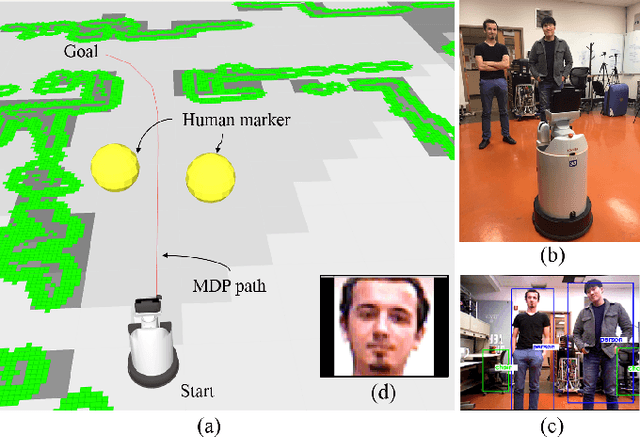
When mobile robots maneuver near people, they run the risk of rudely blocking their paths; but not all people behave the same around robots. People that have not noticed the robot are the most difficult to predict. This paper investigates how mobile robots can generate acceptable paths in dynamic environments by predicting human behavior. Here, human behavior may include both physical and mental behavior, we focus on the latter. We introduce a simple safe interaction model: when a human seems unaware of the robot, it should avoid going too close. In this study, people around robots are detected and tracked using sensor fusion and filtering techniques. To handle uncertainties in the dynamic environment, a Partially-Observable Markov Decision Process Model (POMDP) is used to formulate a navigation planning problem in the shared environment. People's awareness of robots is inferred and included as a state and reward model in the POMDP. The proposed planner enables a robot to change its navigation plan based on its perception of each person's robot-awareness. As far as we can tell, this is a new capability. We conduct simulation and experiments using the Toyota Human Support Robot (HSR) to validate our approach. We demonstrate that the proposed framework is capable of running in real-time.