 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Online Multi-Sensor Depth Fusion
Apr 07, 2022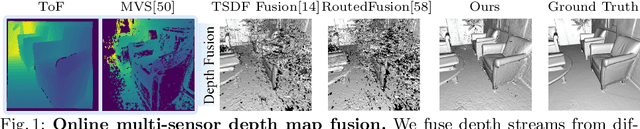
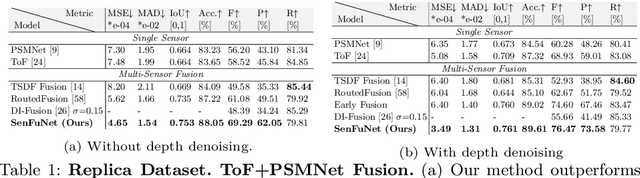
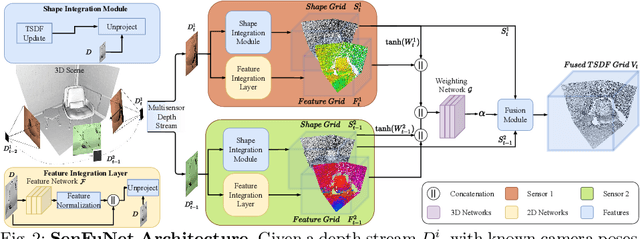
Many hand-held or mixed reality devices are used with a single sensor for 3D reconstruction, although they often comprise multiple sensors. Multi-sensor depth fusion is able to substantially improve the robustness and accuracy of 3D reconstruction methods, but existing techniques are not robust enough to handle sensors which operate with diverse value ranges as well as noise and outlier statistics. To this end, we introduce SenFuNet, a depth fusion approach that learns sensor-specific noise and outlier statistics and combines the data streams of depth frames from different sensors in an online fashion. Our method fuses multi-sensor depth streams regardless of time synchronization and calibration and generalizes well with little training data. We conduct experiments with various sensor combinations on the real-world CoRBS and Scene3D datasets, as well as the Replica dataset. Experiments demonstrate that our fusion strategy outperforms traditional and recent online depth fusion approaches. In addition, the combination of multiple sensors yields more robust outlier handling and precise surface reconstruction than the use of a single sensor.
Coarse-to-Fine Feature Mining for Video Semantic Segmentation
Apr 07, 2022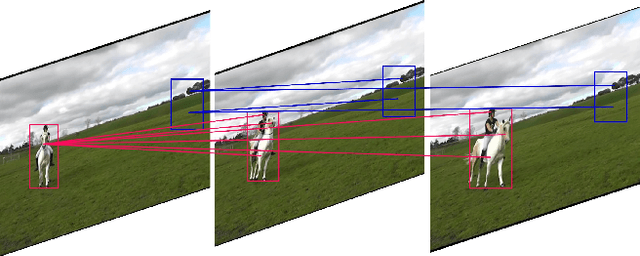
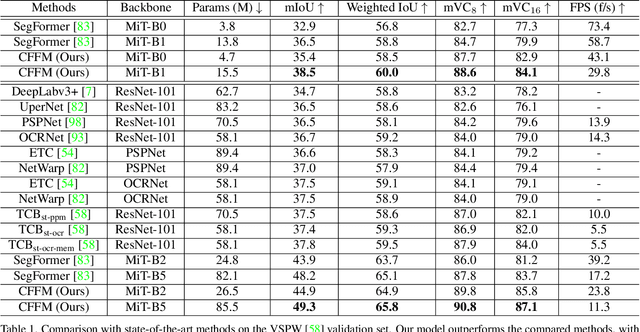
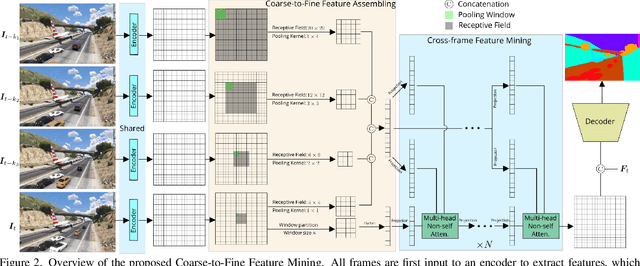
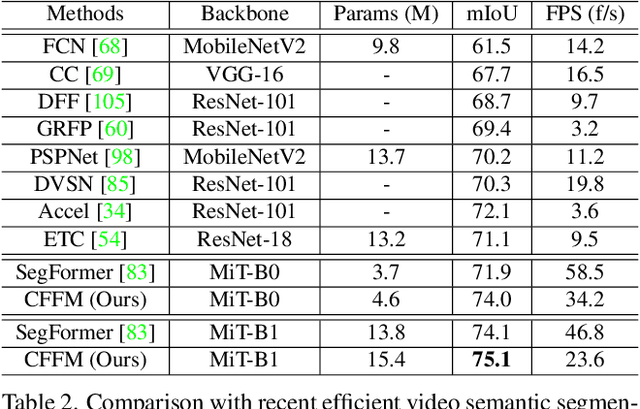
The contextual information plays a core role in semantic segmentation. As for video semantic segmentation, the contexts include static contexts and motional contexts, corresponding to static content and moving content in a video clip, respectively. The static contexts are well exploited in image semantic segmentation by learning multi-scale and global/long-range features. The motional contexts are studied in previous video semantic segmentation. However, there is no research about how to simultaneously learn static and motional contexts which are highly correlated and complementary to each other. To address this problem, we propose a Coarse-to-Fine Feature Mining (CFFM) technique to learn a unified presentation of static contexts and motional contexts. This technique consists of two parts: coarse-to-fine feature assembling and cross-frame feature mining. The former operation prepares data for further processing, enabling the subsequent joint learning of static and motional contexts. The latter operation mines useful information/contexts from the sequential frames to enhance the video contexts of the features of the target frame. The enhanced features can be directly applied for the final prediction. Experimental results on popular benchmarks demonstrate that the proposed CFFM performs favorably against state-of-the-art methods for video semantic segmentation. Our implementation is available at https://github.com/GuoleiSun/VSS-CFFM
Deep Interactive Motion Prediction and Planning: Playing Games with Motion Prediction Models
Apr 05, 2022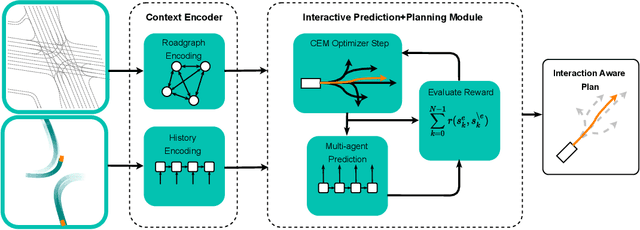
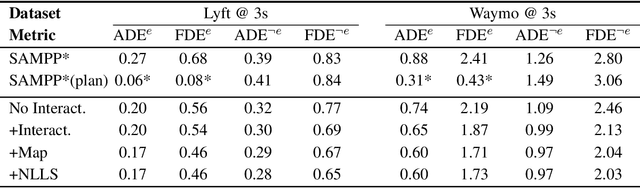

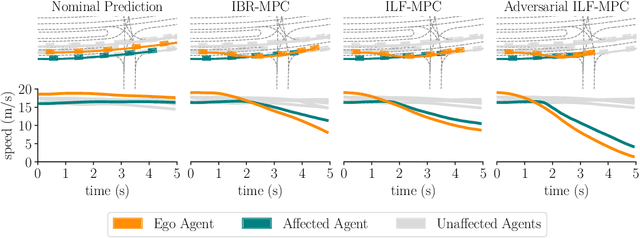
In most classical Autonomous Vehicle (AV) stacks, the prediction and planning layers are separated, limiting the planner to react to predictions that are not informed by the planned trajectory of the AV. This work presents a module that tightly couples these layers via a game-theoretic Model Predictive Controller (MPC) that uses a novel interactive multi-agent neural network policy as part of its predictive model. In our setting, the MPC planner considers all the surrounding agents by informing the multi-agent policy with the planned state sequence. Fundamental to the success of our method is the design of a novel multi-agent policy network that can steer a vehicle given the state of the surrounding agents and the map information. The policy network is trained implicitly with ground-truth observation data using backpropagation through time and a differentiable dynamics model to roll out the trajectory forward in time. Finally, we show that our multi-agent policy network learns to drive while interacting with the environment, and, when combined with the game-theoretic MPC planner, can successfully generate interactive behaviors.
Arbitrary-Scale Image Synthesis
Apr 05, 2022Positional encodings have enabled recent works to train a single adversarial network that can generate images of different scales. However, these approaches are either limited to a set of discrete scales or struggle to maintain good perceptual quality at the scales for which the model is not trained explicitly. We propose the design of scale-consistent positional encodings invariant to our generator's layers transformations. This enables the generation of arbitrary-scale images even at scales unseen during training. Moreover, we incorporate novel inter-scale augmentations into our pipeline and partial generation training to facilitate the synthesis of consistent images at arbitrary scales. Lastly, we show competitive results for a continuum of scales on various commonly used datasets for image synthesis.
P3Depth: Monocular Depth Estimation with a Piecewise Planarity Prior
Apr 05, 2022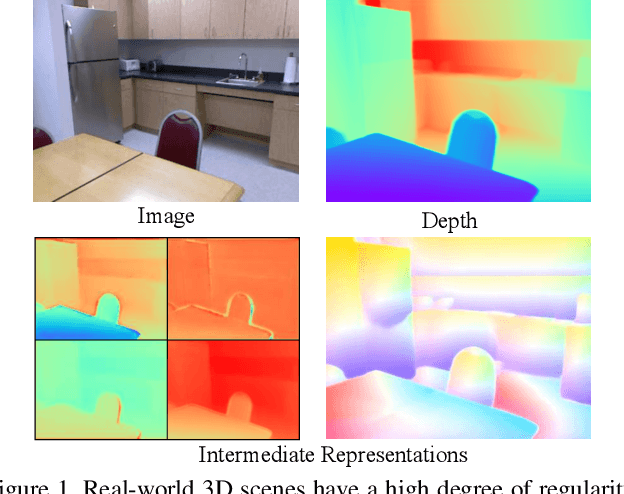
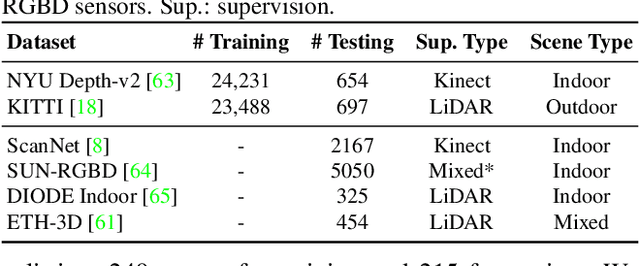
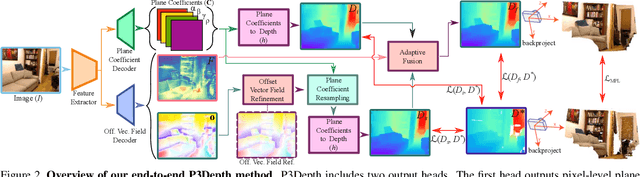
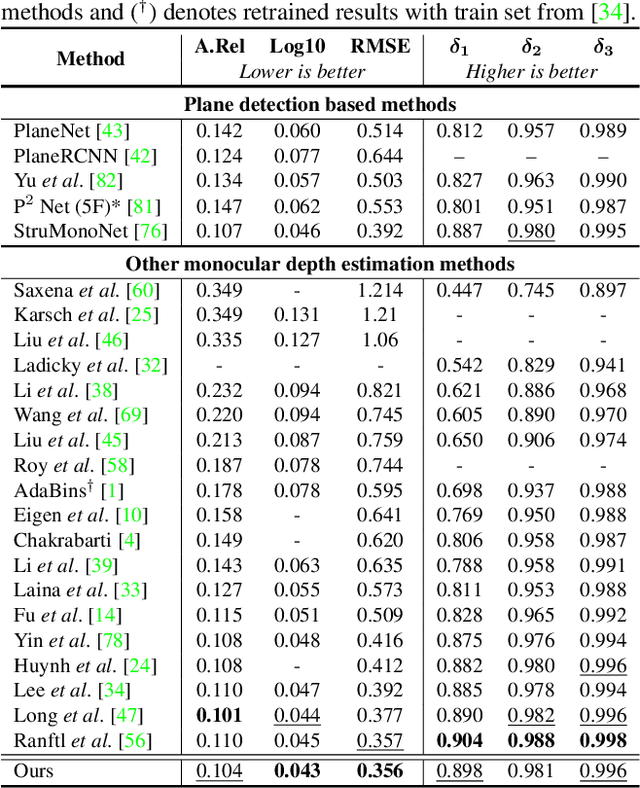
Monocular depth estimation is vital for scene understanding and downstream tasks. We focus on the supervised setup, in which ground-truth depth is available only at training time. Based on knowledge about the high regularity of real 3D scenes, we propose a method that learns to selectively leverage information from coplanar pixels to improve the predicted depth. In particular, we introduce a piecewise planarity prior which states that for each pixel, there is a seed pixel which shares the same planar 3D surface with the former. Motivated by this prior, we design a network with two heads. The first head outputs pixel-level plane coefficients, while the second one outputs a dense offset vector field that identifies the positions of seed pixels. The plane coefficients of seed pixels are then used to predict depth at each position. The resulting prediction is adaptively fused with the initial prediction from the first head via a learned confidence to account for potential deviations from precise local planarity. The entire architecture is trained end-to-end thanks to the differentiability of the proposed modules and it learns to predict regular depth maps, with sharp edges at occlusion boundaries. An extensive evaluation of our method shows that we set the new state of the art in supervised monocular depth estimation, surpassing prior methods on NYU Depth-v2 and on the Garg split of KITTI. Our method delivers depth maps that yield plausible 3D reconstructions of the input scenes. Code is available at: https://github.com/SysCV/P3Depth
Rethinking Semantic Segmentation: A Prototype View
Apr 04, 2022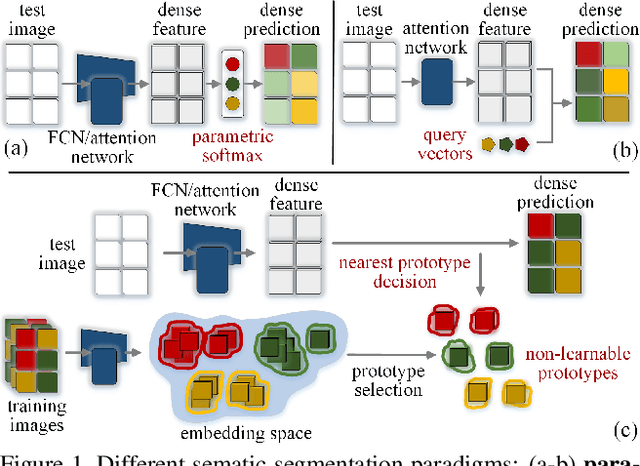
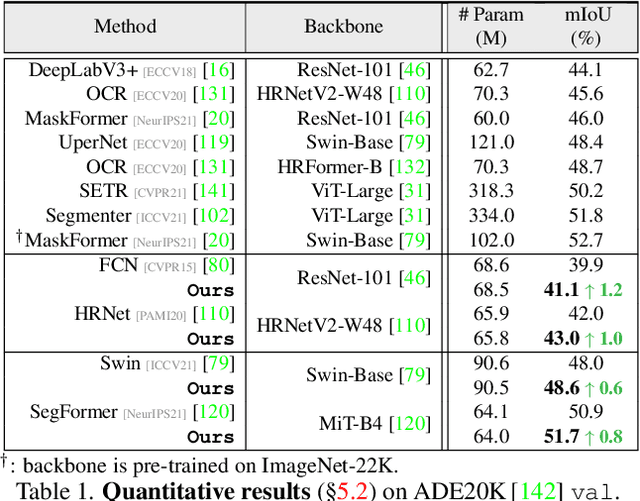
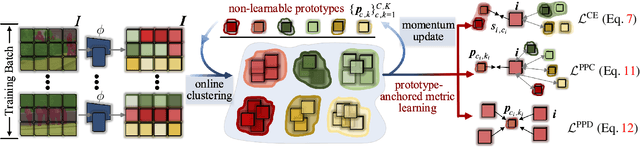
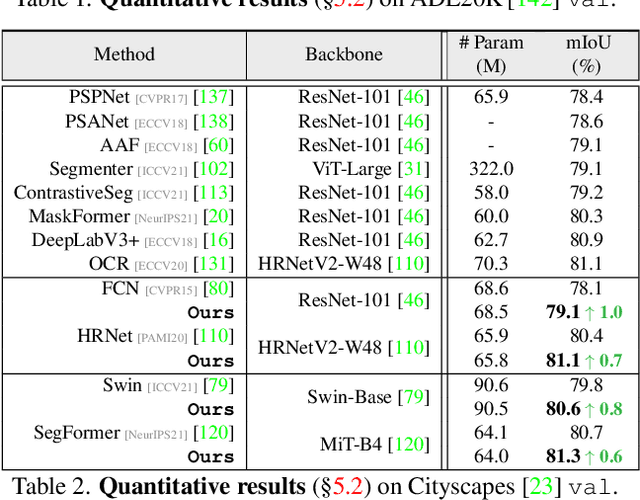
Prevalent semantic segmentation solutions, despite their different network designs (FCN based or attention based) and mask decoding strategies (parametric softmax based or pixel-query based), can be placed in one category, by considering the softmax weights or query vectors as learnable class prototypes. In light of this prototype view, this study uncovers several limitations of such parametric segmentation regime, and proposes a nonparametric alternative based on non-learnable prototypes. Instead of prior methods learning a single weight/query vector for each class in a fully parametric manner, our model represents each class as a set of non-learnable prototypes, relying solely on the mean features of several training pixels within that class. The dense prediction is thus achieved by nonparametric nearest prototype retrieving. This allows our model to directly shape the pixel embedding space, by optimizing the arrangement between embedded pixels and anchored prototypes. It is able to handle arbitrary number of classes with a constant amount of learnable parameters. We empirically show that, with FCN based and attention based segmentation models (i.e., HRNet, Swin, SegFormer) and backbones (i.e., ResNet, HRNet, Swin, MiT), our nonparametric framework yields compelling results over several datasets (i.e., ADE20K, Cityscapes, COCO-Stuff), and performs well in the large-vocabulary situation. We expect this work will provoke a rethink of the current de facto semantic segmentation model design.
FoV-Net: Field-of-View Extrapolation Using Self-Attention and Uncertainty
Apr 04, 2022
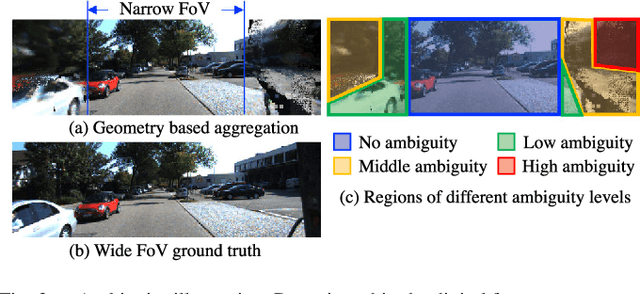
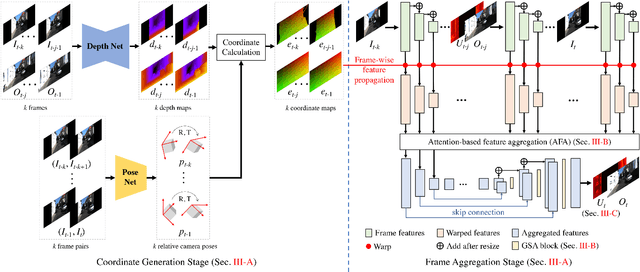
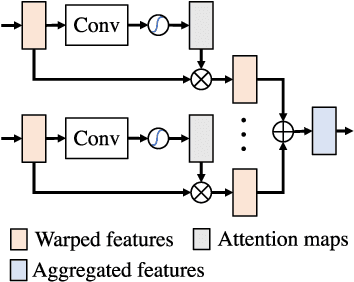
The ability to make educated predictions about their surroundings, and associate them with certain confidence, is important for intelligent systems, like autonomous vehicles and robots. It allows them to plan early and decide accordingly. Motivated by this observation, in this paper we utilize information from a video sequence with a narrow field-of-view to infer the scene at a wider field-of-view. To this end, we propose a temporally consistent field-of-view extrapolation framework, namely FoV-Net, that: (1) leverages 3D information to propagate the observed scene parts from past frames; (2) aggregates the propagated multi-frame information using an attention-based feature aggregation module and a gated self-attention module, simultaneously hallucinating any unobserved scene parts; and (3) assigns an interpretable uncertainty value at each pixel. Extensive experiments show that FoV-Net does not only extrapolate the temporally consistent wide field-of-view scene better than existing alternatives, but also provides the associated uncertainty which may benefit critical decision-making downstream applications. Project page is at http://charliememory.github.io/RAL21_FoV.
Direct Dense Pose Estimation
Apr 04, 2022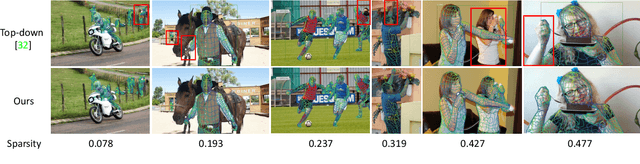
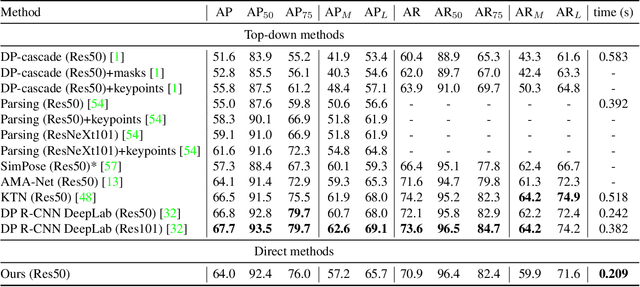
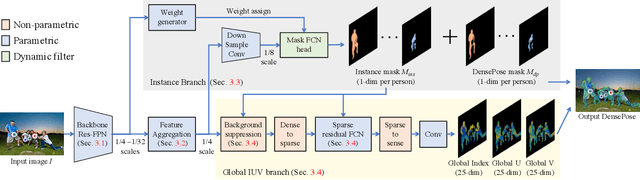

Dense human pose estimation is the problem of learning dense correspondences between RGB images and the surfaces of human bodies, which finds various applications, such as human body reconstruction, human pose transfer, and human action recognition. Prior dense pose estimation methods are all based on Mask R-CNN framework and operate in a top-down manner of first attempting to identify a bounding box for each person and matching dense correspondences in each bounding box. Consequently, these methods lack robustness due to their critical dependence on the Mask R-CNN detection, and the runtime increases drastically as the number of persons in the image increases. We therefore propose a novel alternative method for solving the dense pose estimation problem, called Direct Dense Pose (DDP). DDP first predicts the instance mask and global IUV representation separately and then combines them together. We also propose a simple yet effective 2D temporal-smoothing scheme to alleviate the temporal jitters when dealing with video data. Experiments demonstrate that DDP overcomes the limitations of previous top-down baseline methods and achieves competitive accuracy. In addition, DDP is computationally more efficient than previous dense pose estimation methods, and it reduces jitters when applied to a video sequence, which is a problem plaguing the previous methods.
Scribble-Supervised LiDAR Semantic Segmentation
Mar 31, 2022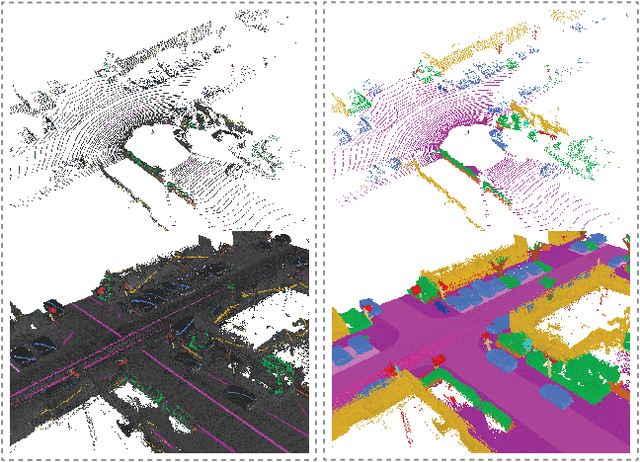
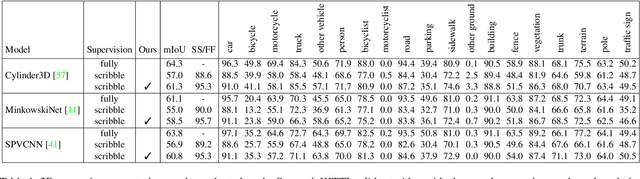
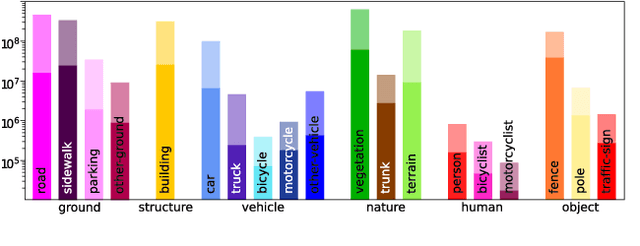
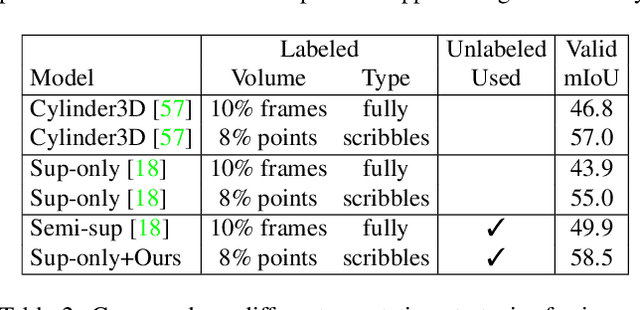
Densely annotating LiDAR point clouds remains too expensive and time-consuming to keep up with the ever growing volume of data. While current literature focuses on fully-supervised performance, developing efficient methods that take advantage of realistic weak supervision have yet to be explored. In this paper, we propose using scribbles to annotate LiDAR point clouds and release ScribbleKITTI, the first scribble-annotated dataset for LiDAR semantic segmentation. Furthermore, we present a pipeline to reduce the performance gap that arises when using such weak annotations. Our pipeline comprises of three stand-alone contributions that can be combined with any LiDAR semantic segmentation model to achieve up to 95.7% of the fully-supervised performance while using only 8% labeled points. Our scribble annotations and code are available at github.com/ouenal/scribblekitti.
Counterfactual Cycle-Consistent Learning for Instruction Following and Generation in Vision-Language Navigation
Mar 30, 2022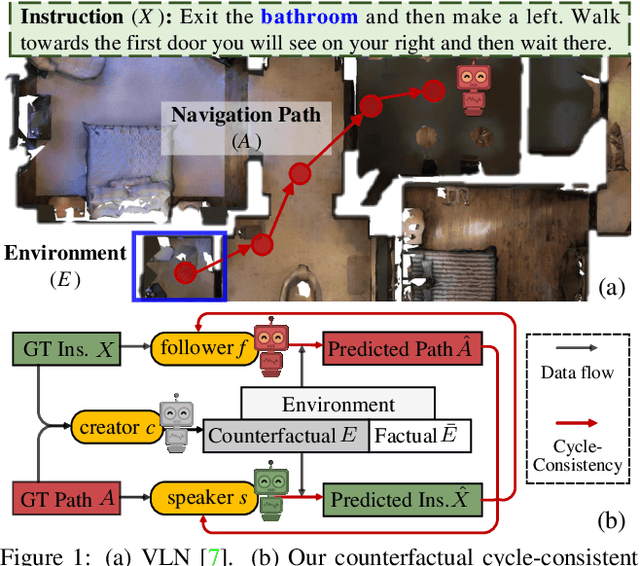
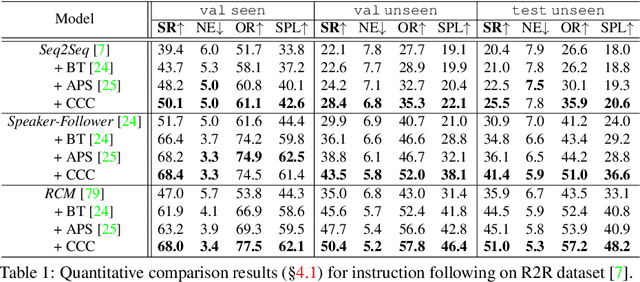

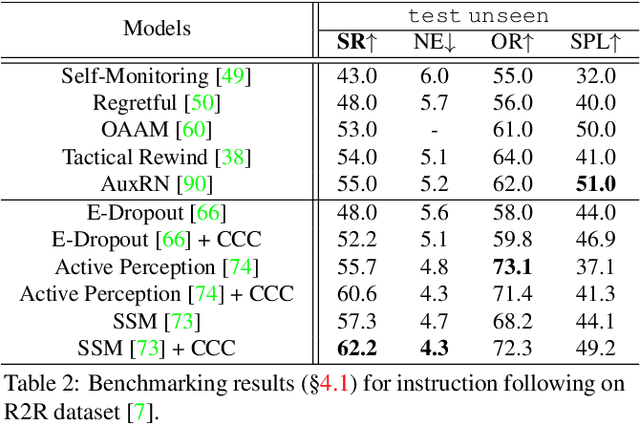
Since the rise of vision-language navigation (VLN), great progress has been made in instruction following -- building a follower to navigate environments under the guidance of instructions. However, far less attention has been paid to the inverse task: instruction generation -- learning a speaker~to generate grounded descriptions for navigation routes. Existing VLN methods train a speaker independently and often treat it as a data augmentation tool to strengthen the follower while ignoring rich cross-task relations. Here we describe an approach that learns the two tasks simultaneously and exploits their intrinsic correlations to boost the training of each: the follower judges whether the speaker-created instruction explains the original navigation route correctly, and vice versa. Without the need of aligned instruction-path pairs, such cycle-consistent learning scheme is complementary to task-specific training targets defined on labeled data, and can also be applied over unlabeled paths (sampled without paired instructions). Another agent, called~creator is added to generate counterfactual environments. It greatly changes current scenes yet leaves novel items -- which are vital for the execution of original instructions -- unchanged. Thus more informative training scenes are synthesized and the three agents compose a powerful VLN learning system. Extensive experiments on a standard benchmark show that our approach improves the performance of various follower models and produces accurate navigation instructions.