 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFull-Duplex Strategy for Video Object Segmentation
Sep 03, 2021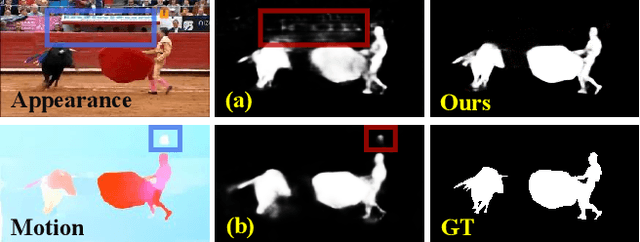

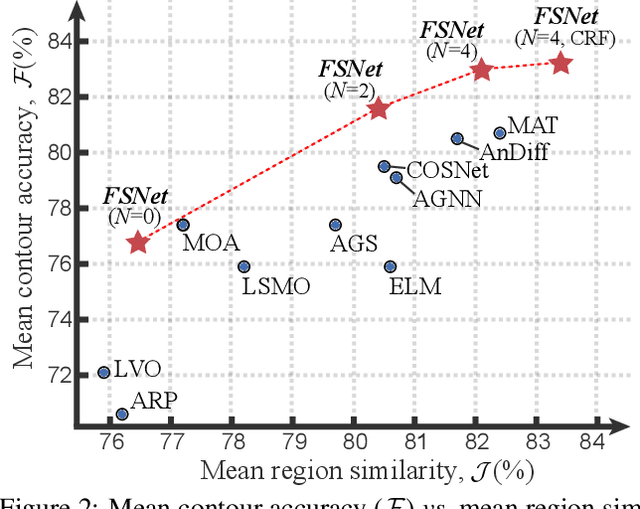
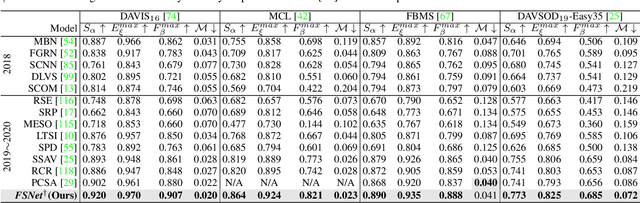
Previous video object segmentation approaches mainly focus on using simplex solutions between appearance and motion, limiting feature collaboration efficiency among and across these two cues. In this work, we study a novel and efficient full-duplex strategy network (FSNet) to address this issue, by considering a better mutual restraint scheme between motion and appearance in exploiting the cross-modal features from the fusion and decoding stage. Specifically, we introduce the relational cross-attention module (RCAM) to achieve bidirectional message propagation across embedding sub-spaces. To improve the model's robustness and update the inconsistent features from the spatial-temporal embeddings, we adopt the bidirectional purification module (BPM) after the RCAM. Extensive experiments on five popular benchmarks show that our FSNet is robust to various challenging scenarios (e.g., motion blur, occlusion) and achieves favourable performance against existing cutting-edges both in the video object segmentation and video salient object detection tasks. The project is publicly available at: https://dpfan.net/FSNet.
Exploring Separable Attention for Multi-Contrast MR Image Super-Resolution
Sep 03, 2021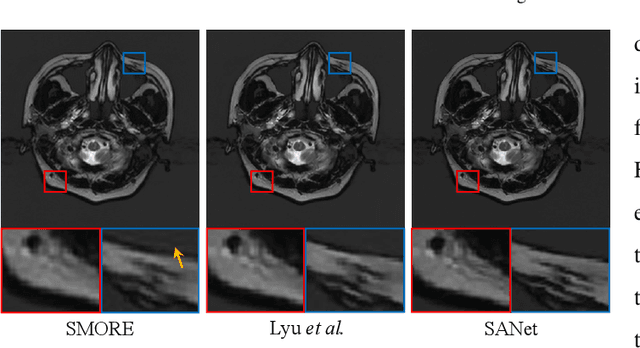
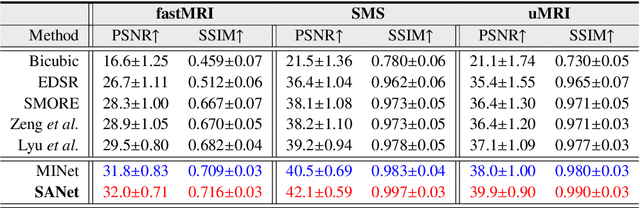
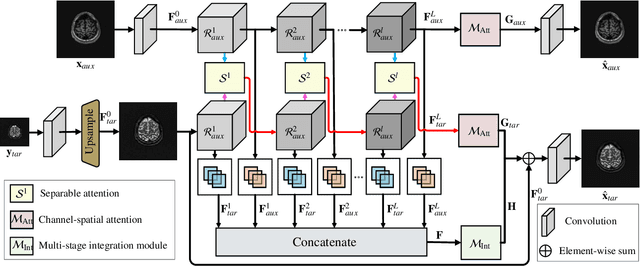
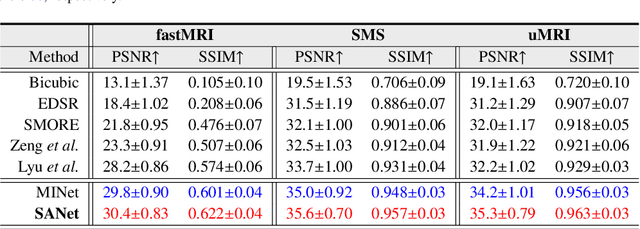
Super-resolving the Magnetic Resonance (MR) image of a target contrast under the guidance of the corresponding auxiliary contrast, which provides additional anatomical information, is a new and effective solution for fast MR imaging. However, current multi-contrast super-resolution (SR) methods tend to concatenate different contrasts directly, ignoring their relationships in different clues, \eg, in the foreground and background. In this paper, we propose a separable attention network (comprising a foreground priority attention and background separation attention), named SANet. Our method can explore the foreground and background areas in the forward and reverse directions with the help of the auxiliary contrast, enabling it to learn clearer anatomical structures and edge information for the SR of a target-contrast MR image. SANet provides three appealing benefits: (1) It is the first model to explore a separable attention mechanism that uses the auxiliary contrast to predict the foreground and background regions, diverting more attention to refining any uncertain details between these regions and correcting the fine areas in the reconstructed results. (2) A multi-stage integration module is proposed to learn the response of multi-contrast fusion at different stages, obtain the dependency between the fused features, and improve their representation ability. (3) Extensive experiments with various state-of-the-art multi-contrast SR methods on fastMRI and clinical \textit{in vivo} datasets demonstrate the superiority of our model.
Seminar Learning for Click-Level Weakly Supervised Semantic Segmentation
Aug 30, 2021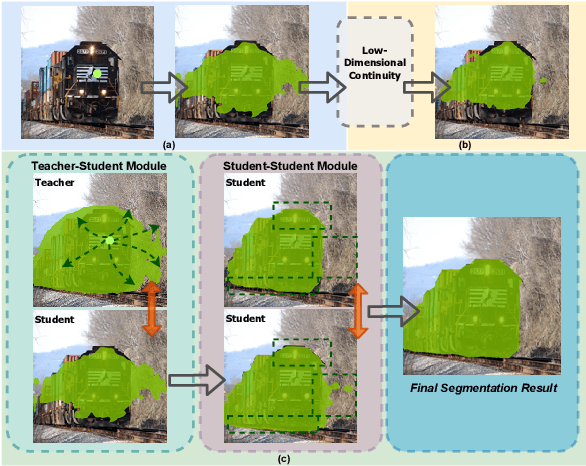
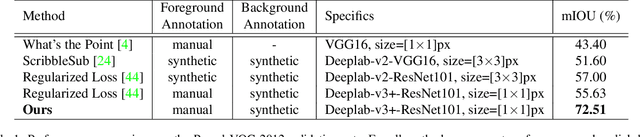
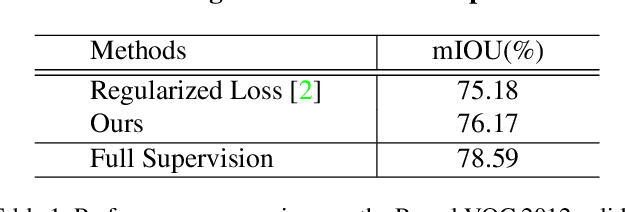
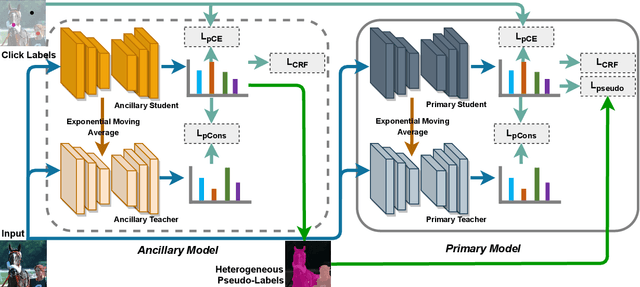
Annotation burden has become one of the biggest barriers to semantic segmentation. Approaches based on click-level annotations have therefore attracted increasing attention due to their superior trade-off between supervision and annotation cost. In this paper, we propose seminar learning, a new learning paradigm for semantic segmentation with click-level supervision. The fundamental rationale of seminar learning is to leverage the knowledge from different networks to compensate for insufficient information provided in click-level annotations. Mimicking a seminar, our seminar learning involves a teacher-student and a student-student module, where a student can learn from both skillful teachers and other students. The teacher-student module uses a teacher network based on the exponential moving average to guide the training of the student network. In the student-student module, heterogeneous pseudo-labels are proposed to bridge the transfer of knowledge among students to enhance each other's performance. Experimental results demonstrate the effectiveness of seminar learning, which achieves the new state-of-the-art performance of 72.51% (mIOU), surpassing previous methods by a large margin of up to 16.88% on the Pascal VOC 2012 dataset.
Discriminative Region-based Multi-Label Zero-Shot Learning
Aug 20, 2021
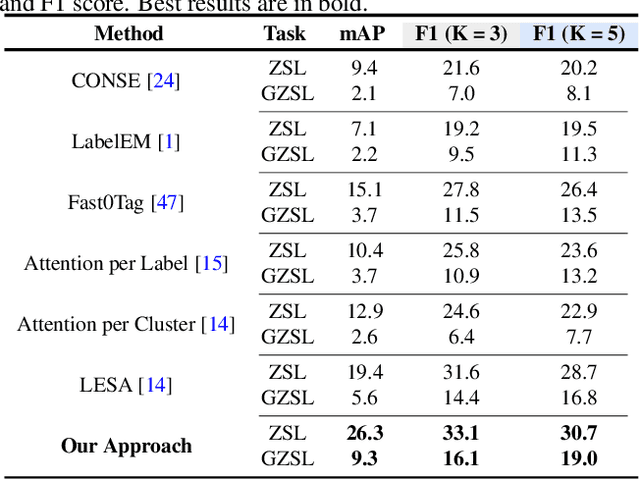
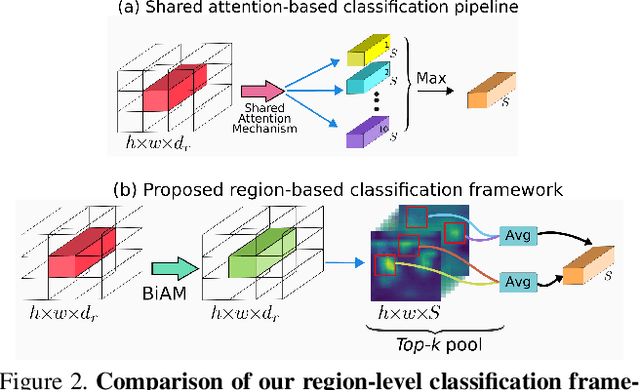
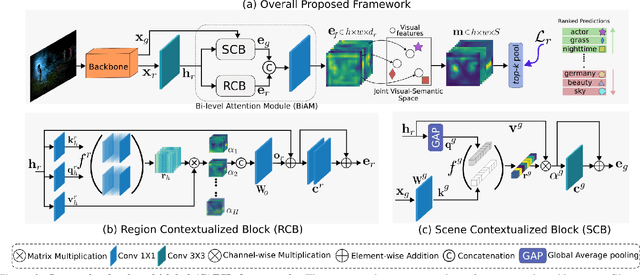
Multi-label zero-shot learning (ZSL) is a more realistic counter-part of standard single-label ZSL since several objects can co-exist in a natural image. However, the occurrence of multiple objects complicates the reasoning and requires region-specific processing of visual features to preserve their contextual cues. We note that the best existing multi-label ZSL method takes a shared approach towards attending to region features with a common set of attention maps for all the classes. Such shared maps lead to diffused attention, which does not discriminatively focus on relevant locations when the number of classes are large. Moreover, mapping spatially-pooled visual features to the class semantics leads to inter-class feature entanglement, thus hampering the classification. Here, we propose an alternate approach towards region-based discriminability-preserving multi-label zero-shot classification. Our approach maintains the spatial resolution to preserve region-level characteristics and utilizes a bi-level attention module (BiAM) to enrich the features by incorporating both region and scene context information. The enriched region-level features are then mapped to the class semantics and only their class predictions are spatially pooled to obtain image-level predictions, thereby keeping the multi-class features disentangled. Our approach sets a new state of the art on two large-scale multi-label zero-shot benchmarks: NUS-WIDE and Open Images. On NUS-WIDE, our approach achieves an absolute gain of 6.9% mAP for ZSL, compared to the best published results.
Learning Anchored Unsigned Distance Functions with Gradient Direction Alignment for Single-view Garment Reconstruction
Aug 19, 2021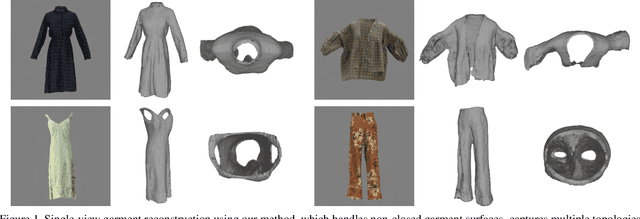
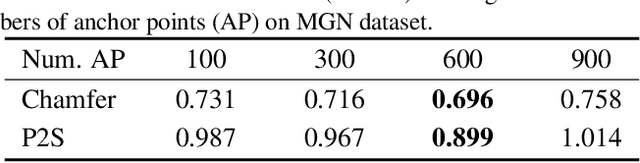
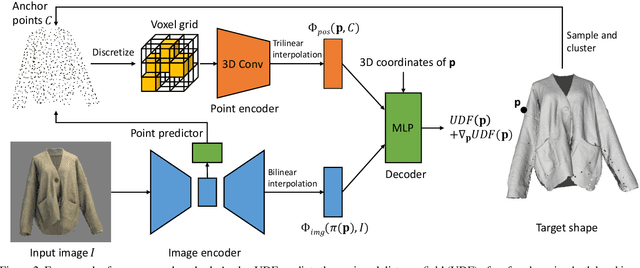
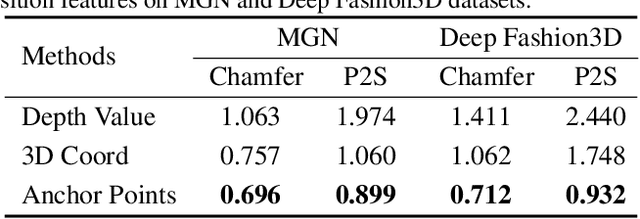
While single-view 3D reconstruction has made significant progress benefiting from deep shape representations in recent years, garment reconstruction is still not solved well due to open surfaces, diverse topologies and complex geometric details. In this paper, we propose a novel learnable Anchored Unsigned Distance Function (AnchorUDF) representation for 3D garment reconstruction from a single image. AnchorUDF represents 3D shapes by predicting unsigned distance fields (UDFs) to enable open garment surface modeling at arbitrary resolution. To capture diverse garment topologies, AnchorUDF not only computes pixel-aligned local image features of query points, but also leverages a set of anchor points located around the surface to enrich 3D position features for query points, which provides stronger 3D space context for the distance function. Furthermore, in order to obtain more accurate point projection direction at inference, we explicitly align the spatial gradient direction of AnchorUDF with the ground-truth direction to the surface during training. Extensive experiments on two public 3D garment datasets, i.e., MGN and Deep Fashion3D, demonstrate that AnchorUDF achieves the state-of-the-art performance on single-view garment reconstruction.
Specificity-preserving RGB-D Saliency Detection
Aug 18, 2021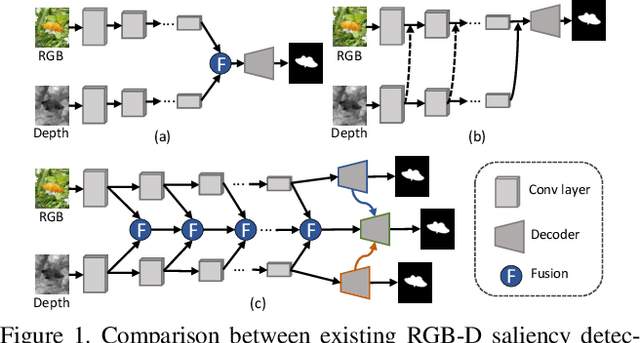
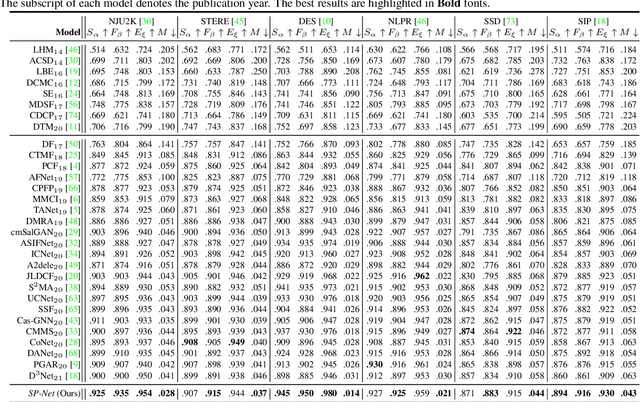
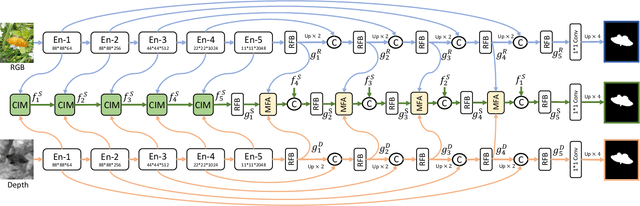
RGB-D saliency detection has attracted increasing attention, due to its effectiveness and the fact that depth cues can now be conveniently captured. Existing works often focus on learning a shared representation through various fusion strategies, with few methods explicitly considering how to preserve modality-specific characteristics. In this paper, taking a new perspective, we propose a specificity-preserving network (SP-Net) for RGB-D saliency detection, which benefits saliency detection performance by exploring both the shared information and modality-specific properties (e.g., specificity). Specifically, two modality-specific networks and a shared learning network are adopted to generate individual and shared saliency maps. A cross-enhanced integration module (CIM) is proposed to fuse cross-modal features in the shared learning network, which are then propagated to the next layer for integrating cross-level information. Besides, we propose a multi-modal feature aggregation (MFA) module to integrate the modality-specific features from each individual decoder into the shared decoder, which can provide rich complementary multi-modal information to boost the saliency detection performance. Further, a skip connection is used to combine hierarchical features between the encoder and decoder layers. Experiments on six benchmark datasets demonstrate that our SP-Net outperforms other state-of-the-art methods. Code is available at: https://github.com/taozh2017/SPNet.
Polyp-PVT: Polyp Segmentation with Pyramid Vision Transformers
Aug 16, 2021
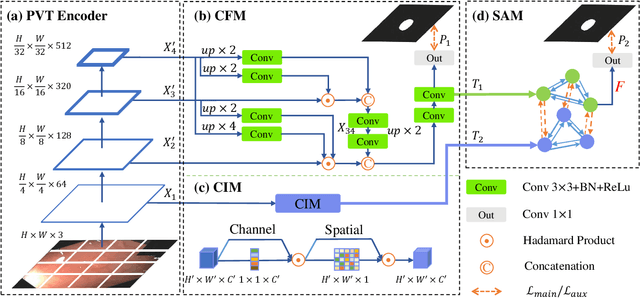
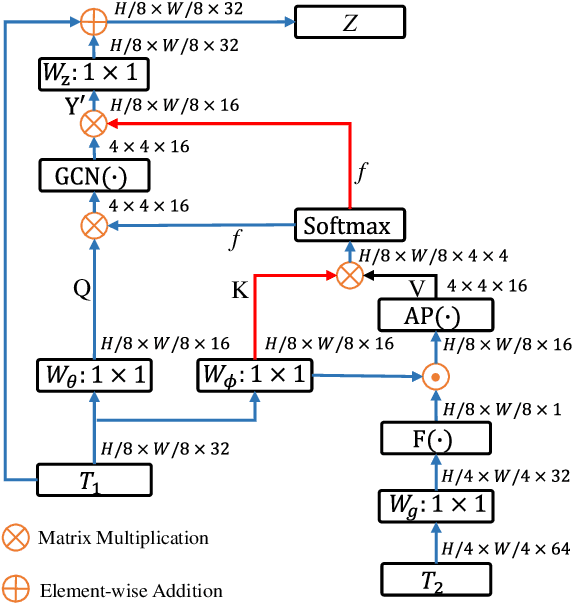
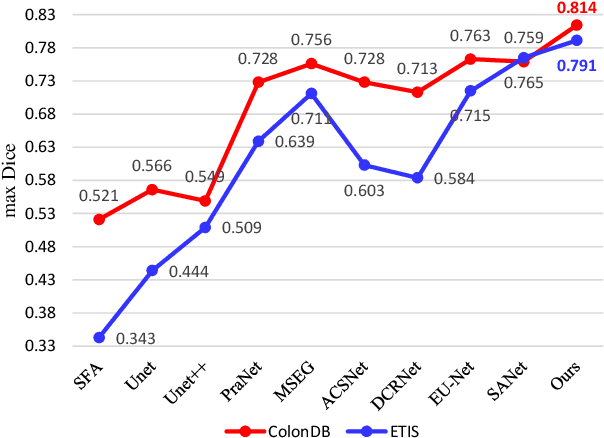
Most polyp segmentation methods use CNNs as their backbone, leading to two key issues when exchanging information between the encoder and decoder: 1) taking into account the differences in contribution between different-level features; and 2) designing effective mechanism for fusing these features. Different from existing CNN-based methods, we adopt a transformer encoder, which learns more powerful and robust representations. In addition, considering the image acquisition influence and elusive properties of polyps, we introduce three novel modules, including a cascaded fusion module (CFM), a camouflage identification module (CIM), a and similarity aggregation module (SAM). Among these, the CFM is used to collect the semantic and location information of polyps from high-level features, while the CIM is applied to capture polyp information disguised in low-level features. With the help of the SAM, we extend the pixel features of the polyp area with high-level semantic position information to the entire polyp area, thereby effectively fusing cross-level features. The proposed model, named \ourmodel, effectively suppresses noises in the features and significantly improves their expressive capabilities. Extensive experiments on five widely adopted datasets show that the proposed model is more robust to various challenging situations (e.g., appearance changes, small objects) than existing methods, and achieves the new state-of-the-art performance. The proposed model is available at https://github.com/DengPingFan/Polyp-PVT .
From Voxel to Point: IoU-guided 3D Object Detection for Point Cloud with Voxel-to-Point Decoder
Aug 08, 2021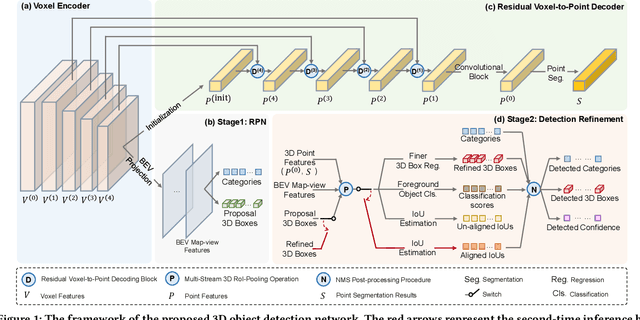
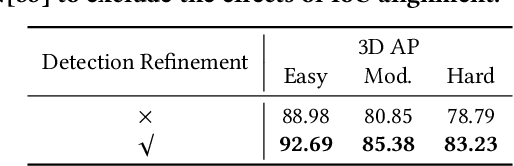
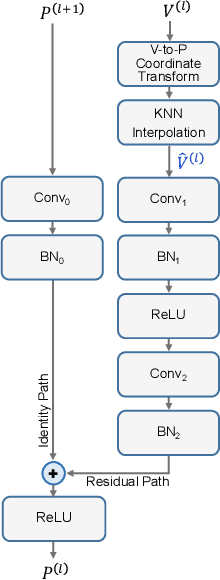
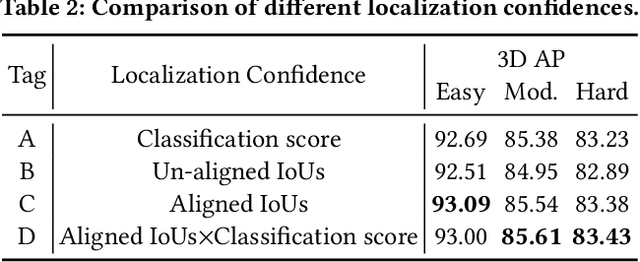
In this paper, we present an Intersection-over-Union (IoU) guided two-stage 3D object detector with a voxel-to-point decoder. To preserve the necessary information from all raw points and maintain the high box recall in voxel based Region Proposal Network (RPN), we propose a residual voxel-to-point decoder to extract the point features in addition to the map-view features from the voxel based RPN. We use a 3D Region of Interest (RoI) alignment to crop and align the features with the proposal boxes for accurately perceiving the object position. The RoI-Aligned features are finally aggregated with the corner geometry embeddings that can provide the potentially missing corner information in the box refinement stage. We propose a simple and efficient method to align the estimated IoUs to the refined proposal boxes as a more relevant localization confidence. The comprehensive experiments on KITTI and Waymo Open Dataset demonstrate that our method achieves significant improvements with novel architectures against the existing methods. The code is available on Github URL\footnote{\url{https://github.com/jialeli1/From-Voxel-to-Point}}.
Anchor-free 3D Single Stage Detector with Mask-Guided Attention for Point Cloud
Aug 08, 2021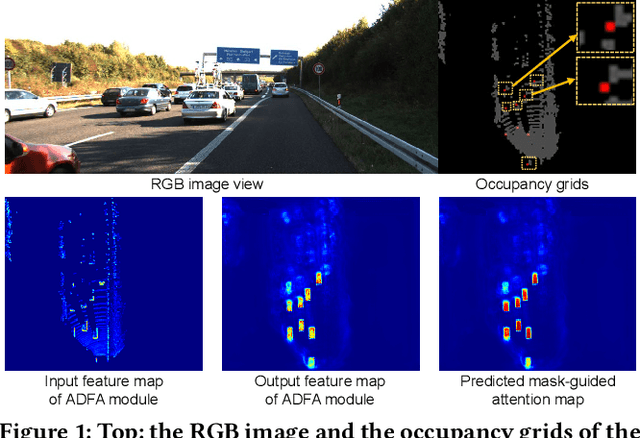
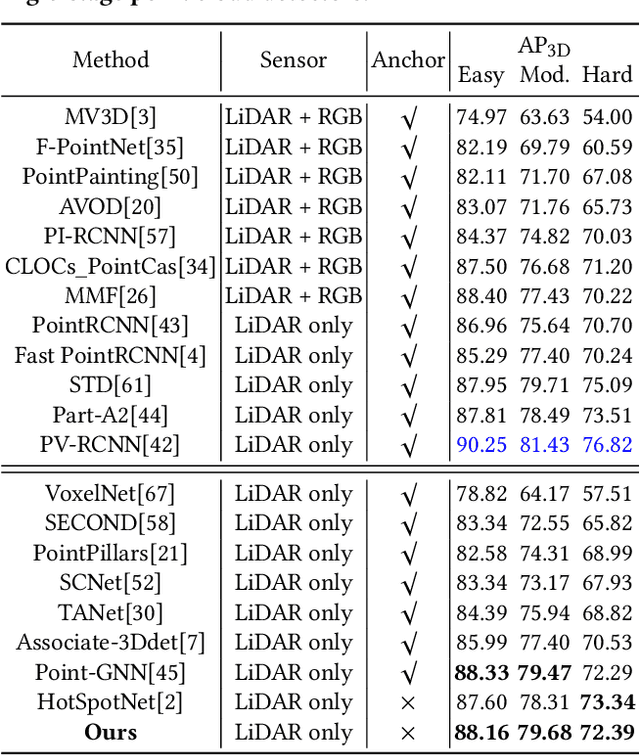
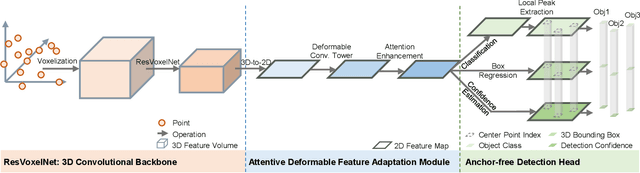
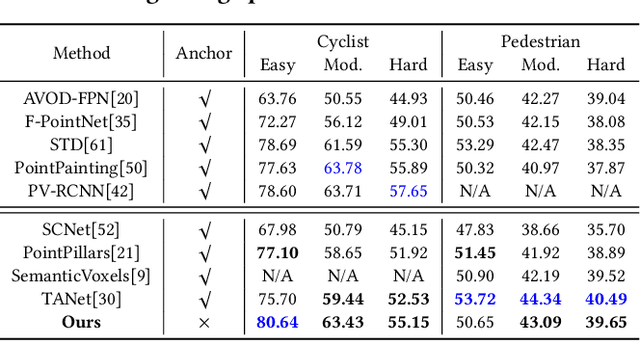
Most of the existing single-stage and two-stage 3D object detectors are anchor-based methods, while the efficient but challenging anchor-free single-stage 3D object detection is not well investigated. Recent studies on 2D object detection show that the anchor-free methods also are of great potential. However, the unordered and sparse properties of point clouds prevent us from directly leveraging the advanced 2D methods on 3D point clouds. We overcome this by converting the voxel-based sparse 3D feature volumes into the sparse 2D feature maps. We propose an attentive module to fit the sparse feature maps to dense mostly on the object regions through the deformable convolution tower and the supervised mask-guided attention. By directly regressing the 3D bounding box from the enhanced and dense feature maps, we construct a novel single-stage 3D detector for point clouds in an anchor-free manner. We propose an IoU-based detection confidence re-calibration scheme to improve the correlation between the detection confidence score and the accuracy of the bounding box regression. Our code is publicly available at \url{https://github.com/jialeli1/MGAF-3DSSD}.
FREE: Feature Refinement for Generalized Zero-Shot Learning
Jul 29, 2021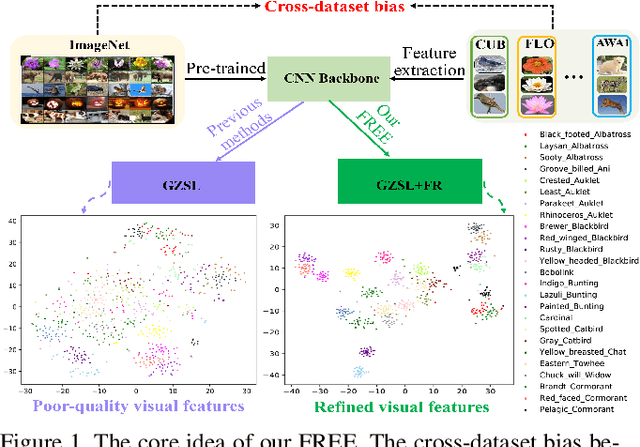
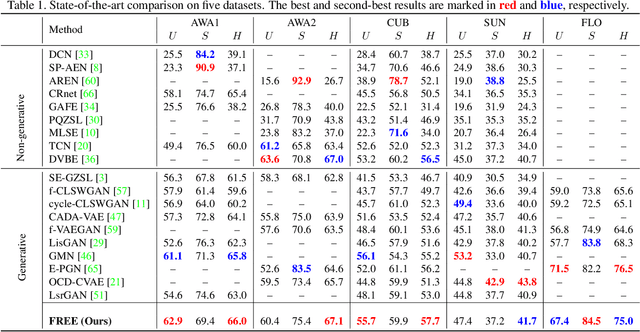
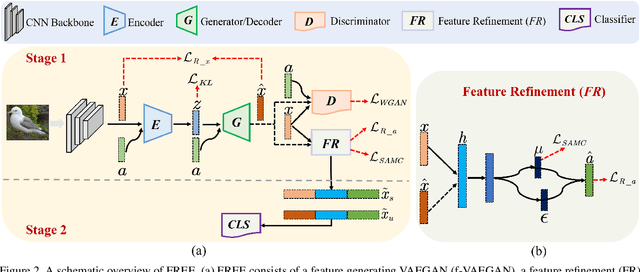
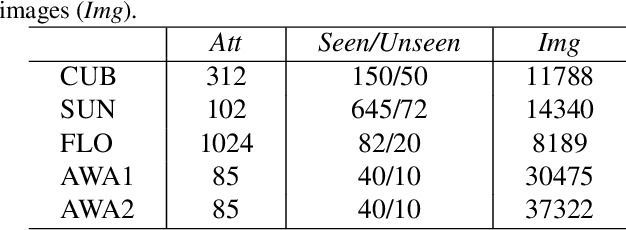
Generalized zero-shot learning (GZSL) has achieved significant progress, with many efforts dedicated to overcoming the problems of visual-semantic domain gap and seen-unseen bias. However, most existing methods directly use feature extraction models trained on ImageNet alone, ignoring the cross-dataset bias between ImageNet and GZSL benchmarks. Such a bias inevitably results in poor-quality visual features for GZSL tasks, which potentially limits the recognition performance on both seen and unseen classes. In this paper, we propose a simple yet effective GZSL method, termed feature refinement for generalized zero-shot learning (FREE), to tackle the above problem. FREE employs a feature refinement (FR) module that incorporates \textit{semantic$\rightarrow$visual} mapping into a unified generative model to refine the visual features of seen and unseen class samples. Furthermore, we propose a self-adaptive margin center loss (SAMC-loss) that cooperates with a semantic cycle-consistency loss to guide FR to learn class- and semantically-relevant representations, and concatenate the features in FR to extract the fully refined features. Extensive experiments on five benchmark datasets demonstrate the significant performance gain of FREE over its baseline and current state-of-the-art methods. Our codes are available at https://github.com/shiming-chen/FREE .