 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVertiCue-Bench: Diagnosing Whether MLLMs Use Height Cues to Resolve 2D Ambiguity in Remote Sensing Natural Scenes
May 25, 2026Multimodal Large Language Models (MLLMs) have recently shown promising progress in geospatial reasoning. However, existing remote sensing benchmarks remain largely 2D-centric, evaluating models primarily on optical appearance. In natural environments, this paradigm breaks down due to severe spectral confusion, where ecologically distinct regions share similar textures but differ fundamentally in vertical structure. In such cases, explicit 3D structural data, such as Canopy Height Models (CHMs), become essential geometric evidence for semantic disambiguation. Yet, it remains unclear whether current MLLMs can genuinely leverage vertical cues to resolve appearance-level ambiguity. To address this gap, we introduce VertiCue-Bench, the first diagnostic benchmark for CHM-grounded geospatial reasoning. VertiCue-Bench comprises 1,534 carefully curated instances across 17 tasks, explicitly disentangling low-level height perception from ambiguity-aware semantic reasoning. Evaluations on 14 state-of-the-art general and remote-sensing-specialized MLLMs, combined with counterfactual modality testing, reveal a striking perception-reasoning dissociation. While models exhibit emerging competence in reading raw CHM height cues, they largely fail to translate geometric perception into reliable semantic reasoning, often underperforming RGB-only baselines when joint constraints are required. Overall, VertiCue-Bench exposes a critical geometry-to-semantics gap in natural scene understanding, offering actionable insights for advancing geospatial MLLMs.
When Should a Robot Think? Resource-Aware Reasoning via Reinforcement Learning for Embodied Robotic Decision-Making
Mar 17, 2026Embodied robotic systems increasingly rely on large language model (LLM)-based agents to support high-level reasoning, planning, and decision-making during interactions with the environment. However, invoking LLM reasoning introduces substantial computational latency and resource overhead, which can interrupt action execution and reduce system reliability. Excessive reasoning may delay actions, while insufficient reasoning often leads to incorrect decisions and task failures. This raises a fundamental question for embodied agents: when should the agent reason, and when should it act? In this work, we propose RARRL (Resource-Aware Reasoning via Reinforcement Learning), a hierarchical framework for resource-aware orchestration of embodied agents. Rather than learning low-level control policies, RARRL learns a high-level orchestration policy that operates at the agent's decision-making layer. This policy enables the agent to adaptively determine whether to invoke reasoning, which reasoning role to employ, and how much computational budget to allocate based on current observations, execution history, and remaining resources. Extensive experiments, including evaluations with empirical latency profiles derived from the ALFRED benchmark, show that RARRL consistently improves task success rates while reducing execution latency and enhancing robustness compared with fixed or heuristic reasoning strategies. These results demonstrate that adaptive reasoning control is essential for building reliable and efficient embodied robotic agents.
Deep Cost-sensitive Learning for Wheat Frost Detection
Dec 25, 2022Frost damage is one of the main factors leading to wheat yield reduction. Therefore, the detection of wheat frost accurately and efficiently is beneficial for growers to take corresponding measures in time to reduce economic loss. To detect the wheat frost, in this paper we create a hyperspectral wheat frost data set by collecting the data characterized by temperature, wheat yield, and hyperspectral information provided by the handheld hyperspectral spectrometer. However, due to the imbalance of data, that is, the number of healthy samples is much higher than the number of frost damage samples, a deep learning algorithm tends to predict biasedly towards the healthy samples resulting in model overfitting of the healthy samples. Therefore, we propose a method based on deep cost-sensitive learning, which uses a one-dimensional convolutional neural network as the basic framework and incorporates cost-sensitive learning with fixed factors and adjustment factors into the loss function to train the network. Meanwhile, the accuracy and score are used as evaluation metrics. Experimental results show that the detection accuracy and the score reached 0.943 and 0.623 respectively, this demonstration shows that this method not only ensures the overall accuracy but also effectively improves the detection rate of frost samples.
Brain EEG Time Series Selection: A Novel Graph-Based Approach for Classification
Feb 09, 2018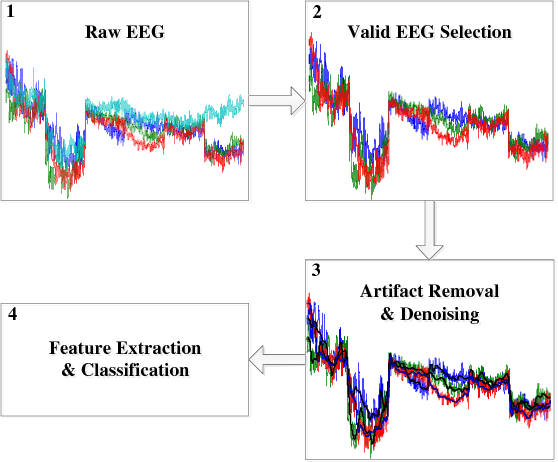
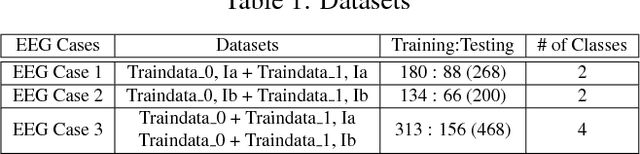
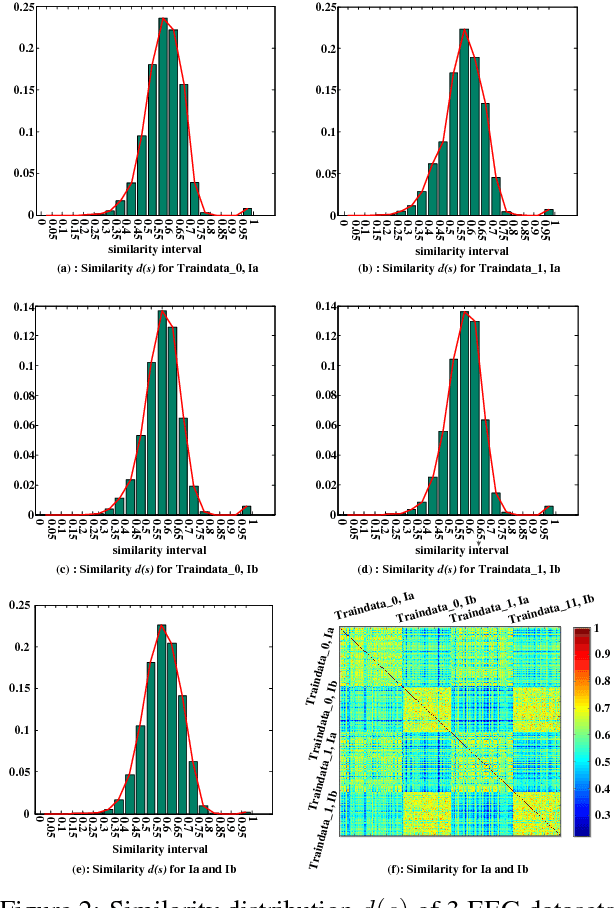
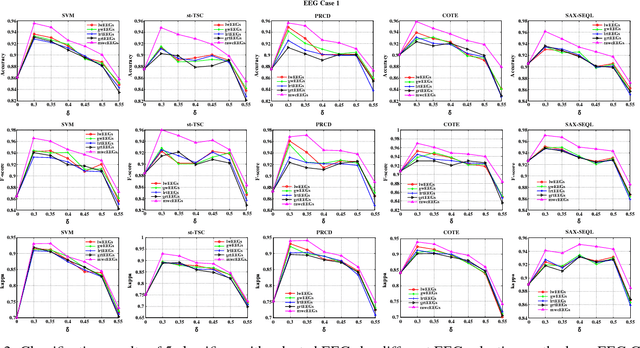
Brain Electroencephalography (EEG) classification is widely applied to analyze cerebral diseases in recent years. Unfortunately, invalid/noisy EEGs degrade the diagnosis performance and most previously developed methods ignore the necessity of EEG selection for classification. To this end, this paper proposes a novel maximum weight clique-based EEG selection approach, named mwcEEGs, to map EEG selection to searching maximum similarity-weighted cliques from an improved Fr\'{e}chet distance-weighted undirected EEG graph simultaneously considering edge weights and vertex weights. Our mwcEEGs improves the classification performance by selecting intra-clique pairwise similar and inter-clique discriminative EEGs with similarity threshold $\delta$. Experimental results demonstrate the algorithm effectiveness compared with the state-of-the-art time series selection algorithms on real-world EEG datasets.