 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMOAT: Alternating Mobile Convolution and Attention Brings Strong Vision Models
Oct 04, 2022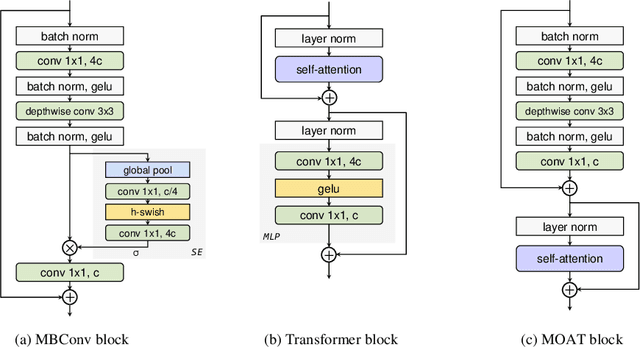

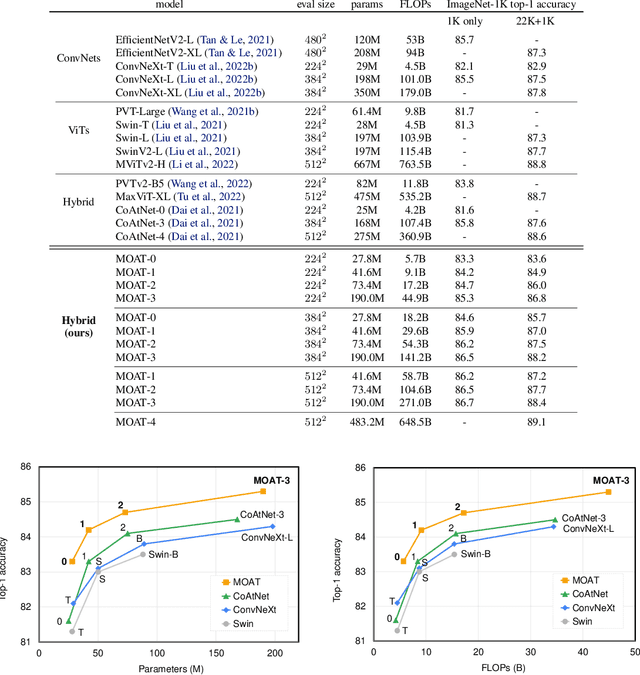
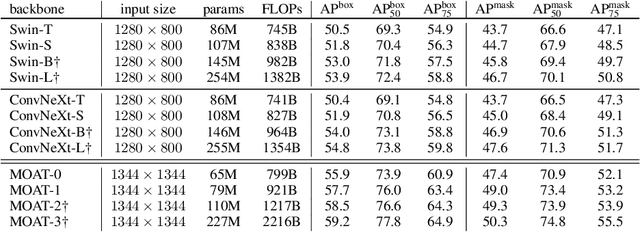
This paper presents MOAT, a family of neural networks that build on top of MObile convolution (i.e., inverted residual blocks) and ATtention. Unlike the current works that stack separate mobile convolution and transformer blocks, we effectively merge them into a MOAT block. Starting with a standard Transformer block, we replace its multi-layer perceptron with a mobile convolution block, and further reorder it before the self-attention operation. The mobile convolution block not only enhances the network representation capacity, but also produces better downsampled features. Our conceptually simple MOAT networks are surprisingly effective, achieving 89.1% top-1 accuracy on ImageNet-1K with ImageNet-22K pretraining. Additionally, MOAT can be seamlessly applied to downstream tasks that require large resolution inputs by simply converting the global attention to window attention. Thanks to the mobile convolution that effectively exchanges local information between pixels (and thus cross-windows), MOAT does not need the extra window-shifting mechanism. As a result, on COCO object detection, MOAT achieves 59.2% box AP with 227M model parameters (single-scale inference, and hard NMS), and on ADE20K semantic segmentation, MOAT attains 57.6% mIoU with 496M model parameters (single-scale inference). Finally, the tiny-MOAT family, obtained by simply reducing the channel sizes, also surprisingly outperforms several mobile-specific transformer-based models on ImageNet. We hope our simple yet effective MOAT will inspire more seamless integration of convolution and self-attention. Code is made publicly available.
k-means Mask Transformer
Jul 08, 2022
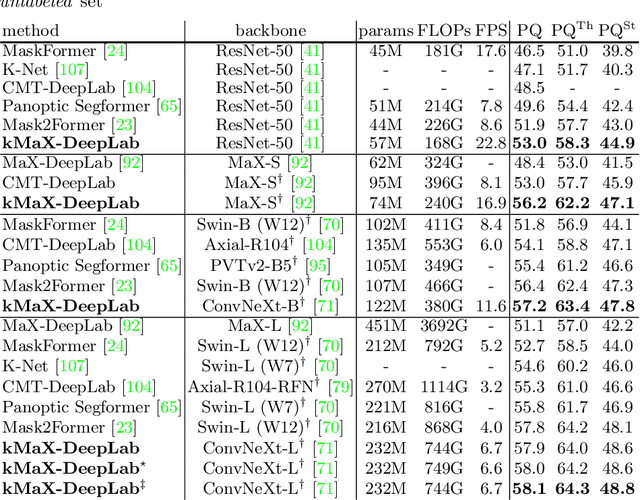
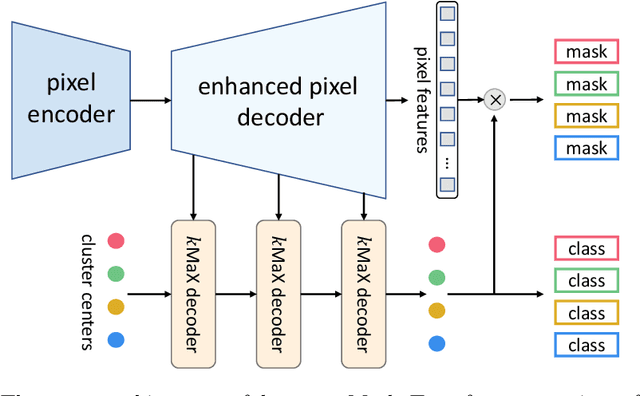
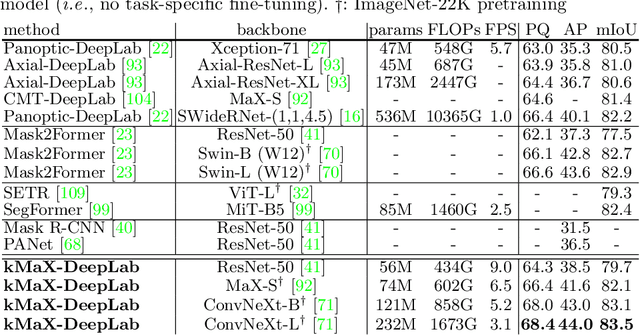
The rise of transformers in vision tasks not only advances network backbone designs, but also starts a brand-new page to achieve end-to-end image recognition (e.g., object detection and panoptic segmentation). Originated from Natural Language Processing (NLP), transformer architectures, consisting of self-attention and cross-attention, effectively learn long-range interactions between elements in a sequence. However, we observe that most existing transformer-based vision models simply borrow the idea from NLP, neglecting the crucial difference between languages and images, particularly the extremely large sequence length of spatially flattened pixel features. This subsequently impedes the learning in cross-attention between pixel features and object queries. In this paper, we rethink the relationship between pixels and object queries and propose to reformulate the cross-attention learning as a clustering process. Inspired by the traditional k-means clustering algorithm, we develop a k-means Mask Xformer (kMaX-DeepLab) for segmentation tasks, which not only improves the state-of-the-art, but also enjoys a simple and elegant design. As a result, our kMaX-DeepLab achieves a new state-of-the-art performance on COCO val set with 58.0% PQ, and Cityscapes val set with 68.4% PQ, 44.0% AP, and 83.5% mIoU without test-time augmentation or external dataset. We hope our work can shed some light on designing transformers tailored for vision tasks. Code and models are available at https://github.com/google-research/deeplab2
CMT-DeepLab: Clustering Mask Transformers for Panoptic Segmentation
Jun 17, 2022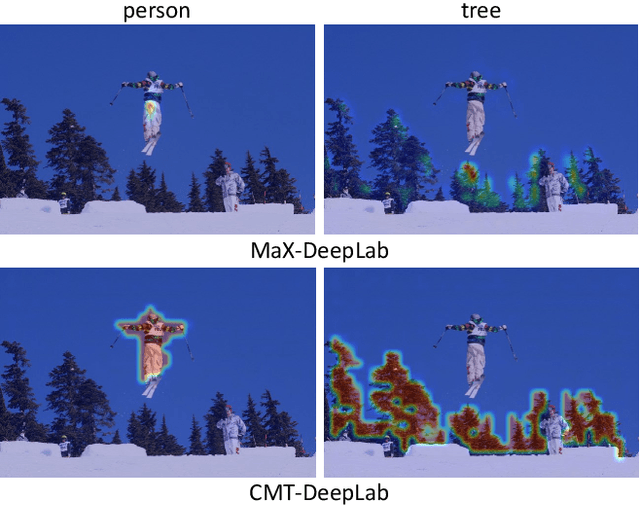
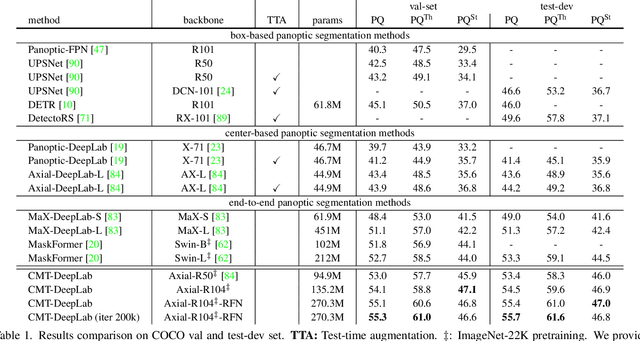
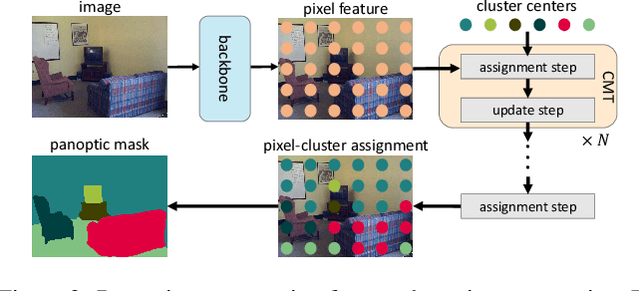

We propose Clustering Mask Transformer (CMT-DeepLab), a transformer-based framework for panoptic segmentation designed around clustering. It rethinks the existing transformer architectures used in segmentation and detection; CMT-DeepLab considers the object queries as cluster centers, which fill the role of grouping the pixels when applied to segmentation. The clustering is computed with an alternating procedure, by first assigning pixels to the clusters by their feature affinity, and then updating the cluster centers and pixel features. Together, these operations comprise the Clustering Mask Transformer (CMT) layer, which produces cross-attention that is denser and more consistent with the final segmentation task. CMT-DeepLab improves the performance over prior art significantly by 4.4% PQ, achieving a new state-of-the-art of 55.7% PQ on the COCO test-dev set.
Waymo Open Dataset: Panoramic Video Panoptic Segmentation
Jun 15, 2022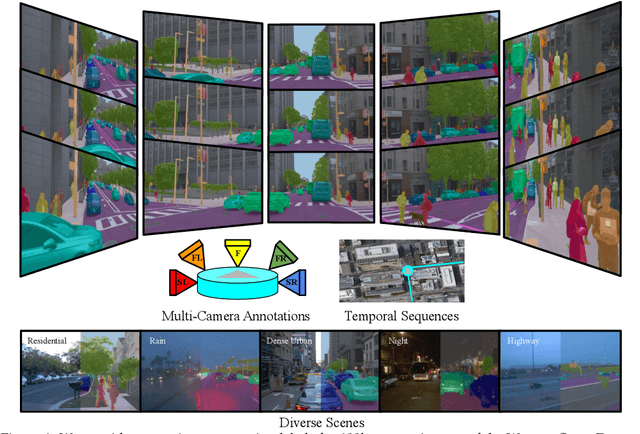
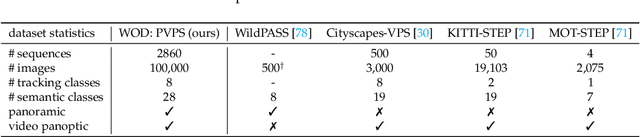
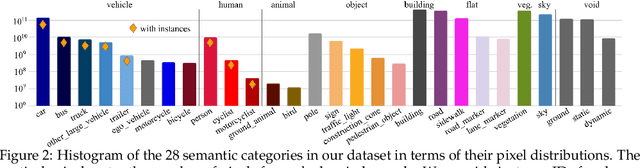
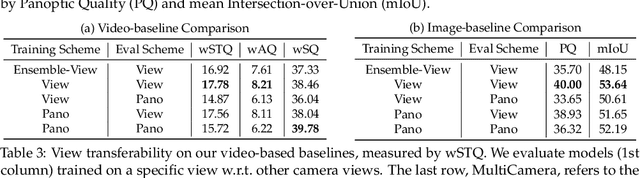
Panoptic image segmentation is the computer vision task of finding groups of pixels in an image and assigning semantic classes and object instance identifiers to them. Research in image segmentation has become increasingly popular due to its critical applications in robotics and autonomous driving. The research community thereby relies on publicly available benchmark dataset to advance the state-of-the-art in computer vision. Due to the high costs of densely labeling the images, however, there is a shortage of publicly available ground truth labels that are suitable for panoptic segmentation. The high labeling costs also make it challenging to extend existing datasets to the video domain and to multi-camera setups. We therefore present the Waymo Open Dataset: Panoramic Video Panoptic Segmentation Dataset, a large-scale dataset that offers high-quality panoptic segmentation labels for autonomous driving. We generate our dataset using the publicly available Waymo Open Dataset, leveraging the diverse set of camera images. Our labels are consistent over time for video processing and consistent across multiple cameras mounted on the vehicles for full panoramic scene understanding. Specifically, we offer labels for 28 semantic categories and 2,860 temporal sequences that were captured by five cameras mounted on autonomous vehicles driving in three different geographical locations, leading to a total of 100k labeled camera images. To the best of our knowledge, this makes our dataset an order of magnitude larger than existing datasets that offer video panoptic segmentation labels. We further propose a new benchmark for Panoramic Video Panoptic Segmentation and establish a number of strong baselines based on the DeepLab family of models. We will make the benchmark and the code publicly available. Find the dataset at https://waymo.com/open.
TubeFormer-DeepLab: Video Mask Transformer
May 30, 2022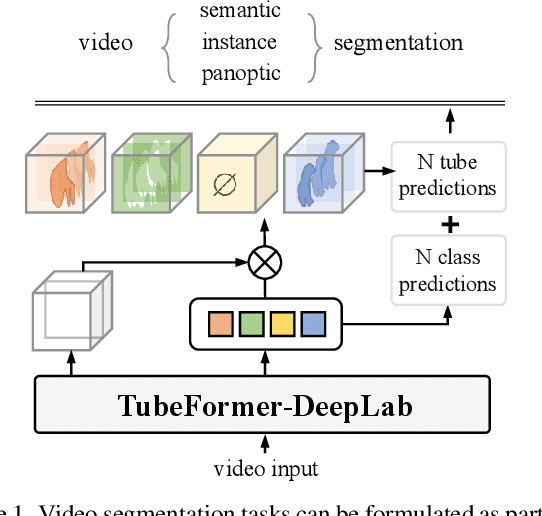
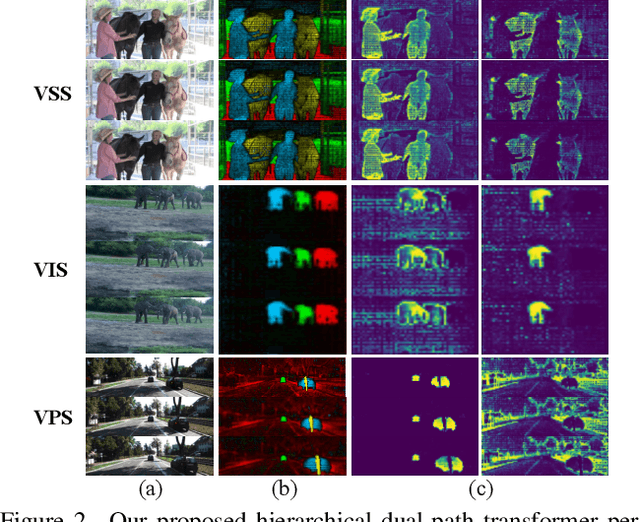
We present TubeFormer-DeepLab, the first attempt to tackle multiple core video segmentation tasks in a unified manner. Different video segmentation tasks (e.g., video semantic/instance/panoptic segmentation) are usually considered as distinct problems. State-of-the-art models adopted in the separate communities have diverged, and radically different approaches dominate in each task. By contrast, we make a crucial observation that video segmentation tasks could be generally formulated as the problem of assigning different predicted labels to video tubes (where a tube is obtained by linking segmentation masks along the time axis) and the labels may encode different values depending on the target task. The observation motivates us to develop TubeFormer-DeepLab, a simple and effective video mask transformer model that is widely applicable to multiple video segmentation tasks. TubeFormer-DeepLab directly predicts video tubes with task-specific labels (either pure semantic categories, or both semantic categories and instance identities), which not only significantly simplifies video segmentation models, but also advances state-of-the-art results on multiple video segmentation benchmarks
DeepLab2: A TensorFlow Library for Deep Labeling
Jun 17, 2021
DeepLab2 is a TensorFlow library for deep labeling, aiming to provide a state-of-the-art and easy-to-use TensorFlow codebase for general dense pixel prediction problems in computer vision. DeepLab2 includes all our recently developed DeepLab model variants with pretrained checkpoints as well as model training and evaluation code, allowing the community to reproduce and further improve upon the state-of-art systems. To showcase the effectiveness of DeepLab2, our Panoptic-DeepLab employing Axial-SWideRNet as network backbone achieves 68.0% PQ or 83.5% mIoU on Cityscaspes validation set, with only single-scale inference and ImageNet-1K pretrained checkpoints. We hope that publicly sharing our library could facilitate future research on dense pixel labeling tasks and envision new applications of this technology. Code is made publicly available at \url{https://github.com/google-research/deeplab2}.
STEP: Segmenting and Tracking Every Pixel
Feb 23, 2021
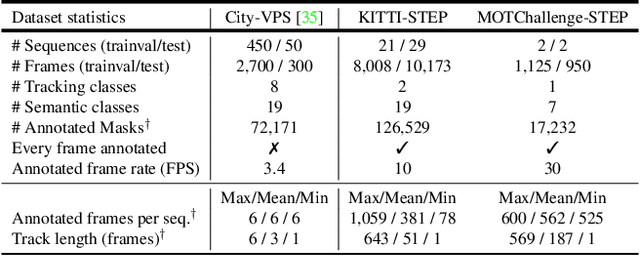

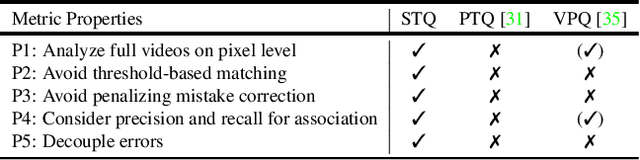
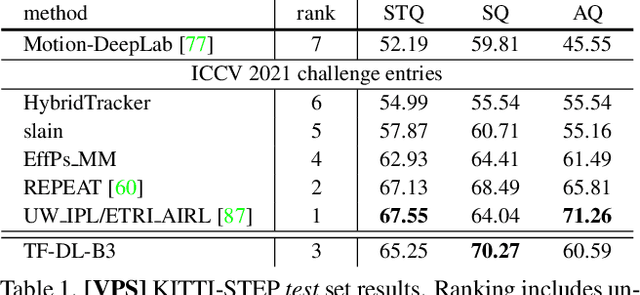
In this paper, we tackle video panoptic segmentation, a task that requires assigning semantic classes and track identities to all pixels in a video. To study this important problem in a setting that requires a continuous interpretation of sensory data, we present a new benchmark: Segmenting and Tracking Every Pixel (STEP), encompassing two datasets, KITTI-STEP, and MOTChallenge-STEP together with a new evaluation metric. Our work is the first that targets this task in a real-world setting that requires dense interpretation in both spatial and temporal domains. As the ground-truth for this task is difficult and expensive to obtain, existing datasets are either constructed synthetically or only sparsely annotated within short video clips. By contrast, our datasets contain long video sequences, providing challenging examples and a test-bed for studying long-term pixel-precise segmentation and tracking. For measuring the performance, we propose a novel evaluation metric Segmentation and Tracking Quality (STQ) that fairly balances semantic and tracking aspects of this task and is suitable for evaluating sequences of arbitrary length. We will make our datasets, metric, and baselines publicly available.
ViP-DeepLab: Learning Visual Perception with Depth-aware Video Panoptic Segmentation
Dec 09, 2020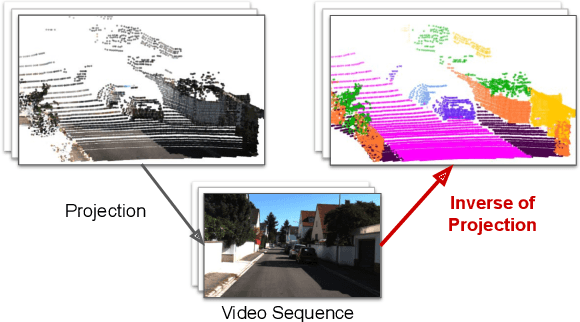
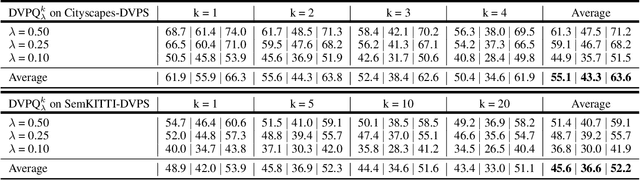
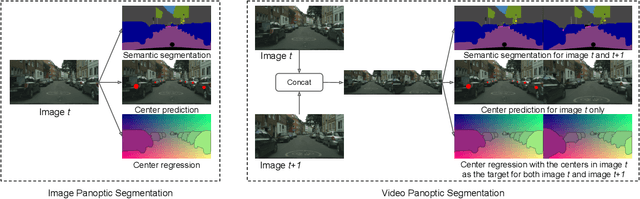
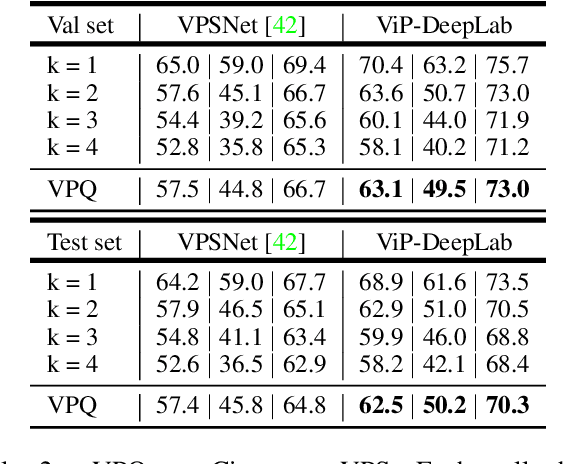
In this paper, we present ViP-DeepLab, a unified model attempting to tackle the long-standing and challenging inverse projection problem in vision, which we model as restoring the point clouds from perspective image sequences while providing each point with instance-level semantic interpretations. Solving this problem requires the vision models to predict the spatial location, semantic class, and temporally consistent instance label for each 3D point. ViP-DeepLab approaches it by jointly performing monocular depth estimation and video panoptic segmentation. We name this joint task as Depth-aware Video Panoptic Segmentation, and propose a new evaluation metric along with two derived datasets for it, which will be made available to the public. On the individual sub-tasks, ViP-DeepLab also achieves state-of-the-art results, outperforming previous methods by 5.1% VPQ on Cityscapes-VPS, ranking 1st on the KITTI monocular depth estimation benchmark, and 1st on KITTI MOTS pedestrian. The datasets and the evaluation codes are made publicly available.
MaX-DeepLab: End-to-End Panoptic Segmentation with Mask Transformers
Dec 01, 2020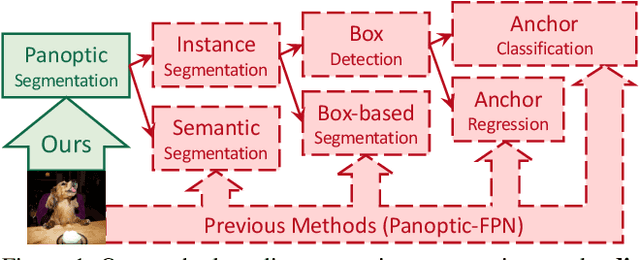
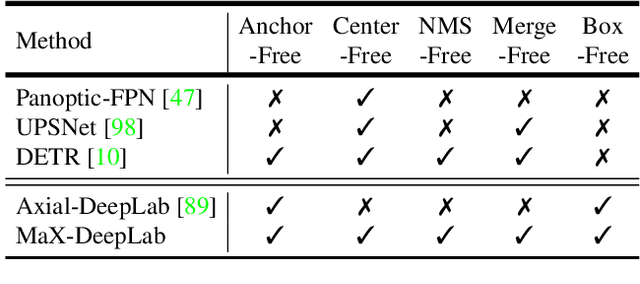
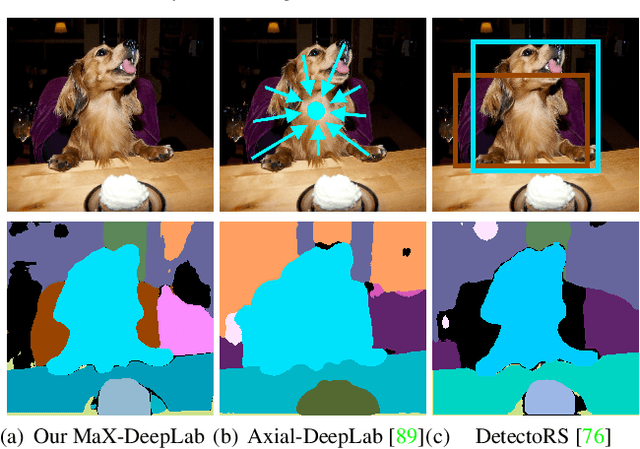
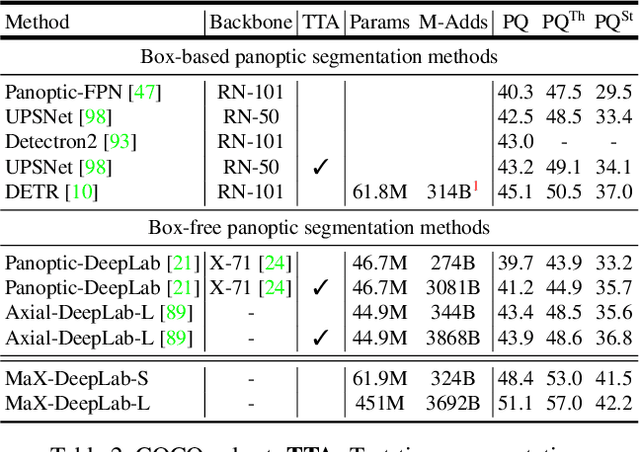
We present MaX-DeepLab, the first end-to-end model for panoptic segmentation. Our approach simplifies the current pipeline that depends heavily on surrogate sub-tasks and hand-designed components, such as box detection, non-maximum suppression, thing-stuff merging, etc. Although these sub-tasks are tackled by area experts, they fail to comprehensively solve the target task. By contrast, our MaX-DeepLab directly predicts class-labeled masks with a mask transformer, and is trained with a panoptic quality inspired loss via bipartite matching. Our mask transformer employs a dual-path architecture that introduces a global memory path in addition to a CNN path, allowing direct communication with any CNN layers. As a result, MaX-DeepLab shows a significant 7.1% PQ gain in the box-free regime on the challenging COCO dataset, closing the gap between box-based and box-free methods for the first time. A small variant of MaX-DeepLab improves 3.0% PQ over DETR with similar parameters and M-Adds. Furthermore, MaX-DeepLab, without test time augmentation, achieves new state-of-the-art 51.3% PQ on COCO test-dev set.
Scaling Wide Residual Networks for Panoptic Segmentation
Nov 23, 2020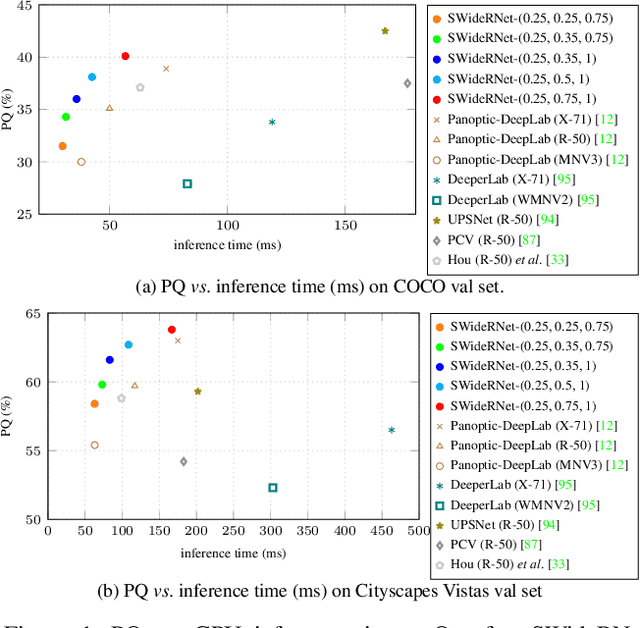
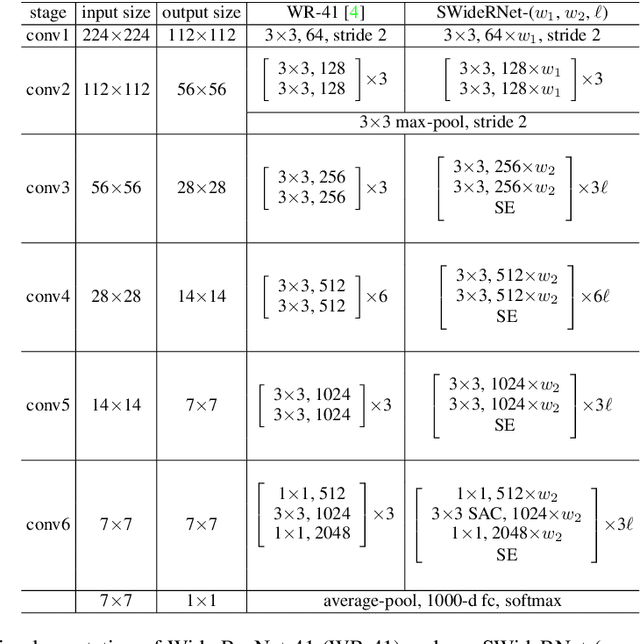
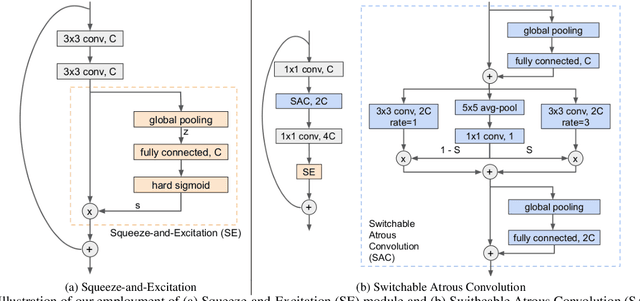
The Wide Residual Networks (Wide-ResNets), a shallow but wide model variant of the Residual Networks (ResNets) by stacking a small number of residual blocks with large channel sizes, have demonstrated outstanding performance on multiple dense prediction tasks. However, since proposed, the Wide-ResNet architecture has barely evolved over the years. In this work, we revisit its architecture design for the recent challenging panoptic segmentation task, which aims to unify semantic segmentation and instance segmentation. A baseline model is obtained by incorporating the simple and effective Squeeze-and-Excitation and Switchable Atrous Convolution to the Wide-ResNets. Its network capacity is further scaled up or down by adjusting the width (i.e., channel size) and depth (i.e., number of layers), resulting in a family of SWideRNets (short for Scaling Wide Residual Networks). We demonstrate that such a simple scaling scheme, coupled with grid search, identifies several SWideRNets that significantly advance state-of-the-art performance on panoptic segmentation datasets in both the fast model regime and strong model regime.