 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConDor: Self-Supervised Canonicalization of 3D Pose for Partial Shapes
Jan 19, 2022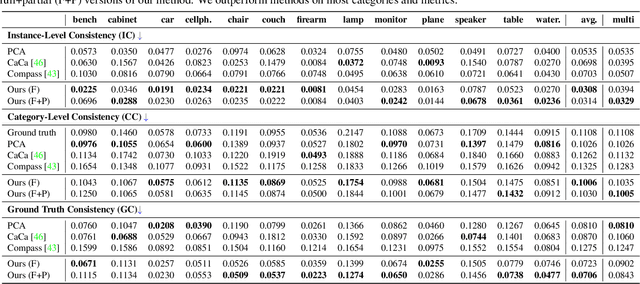
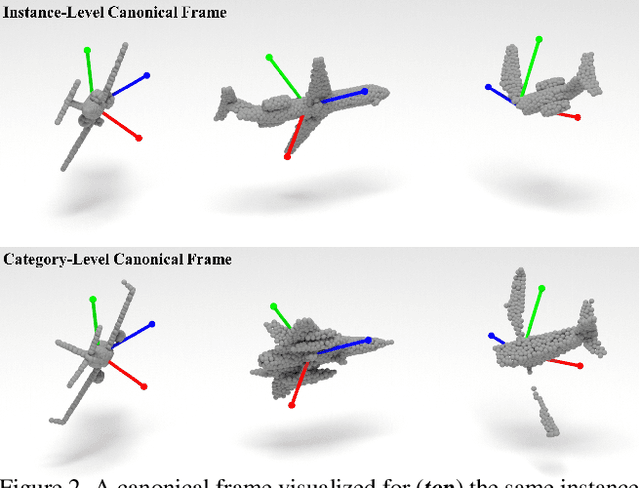
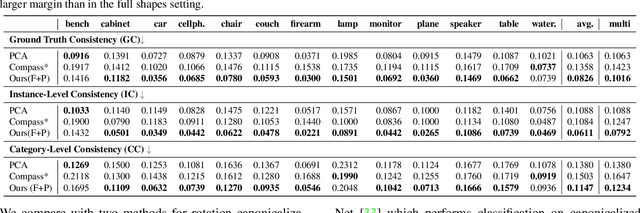
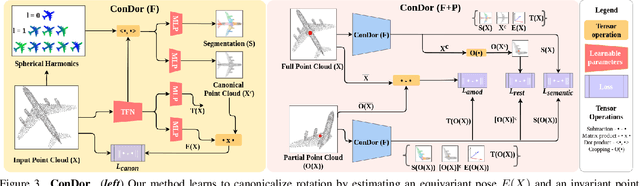
Progress in 3D object understanding has relied on manually canonicalized shape datasets that contain instances with consistent position and orientation (3D pose). This has made it hard to generalize these methods to in-the-wild shapes, eg., from internet model collections or depth sensors. ConDor is a self-supervised method that learns to Canonicalize the 3D orientation and position for full and partial 3D point clouds. We build on top of Tensor Field Networks (TFNs), a class of permutation- and rotation-equivariant, and translation-invariant 3D networks. During inference, our method takes an unseen full or partial 3D point cloud at an arbitrary pose and outputs an equivariant canonical pose. During training, this network uses self-supervision losses to learn the canonical pose from an un-canonicalized collection of full and partial 3D point clouds. ConDor can also learn to consistently co-segment object parts without any supervision. Extensive quantitative results on four new metrics show that our approach outperforms existing methods while enabling new applications such as operation on depth images and annotation transfer.
Generating Useful Accident-Prone Driving Scenarios via a Learned Traffic Prior
Dec 09, 2021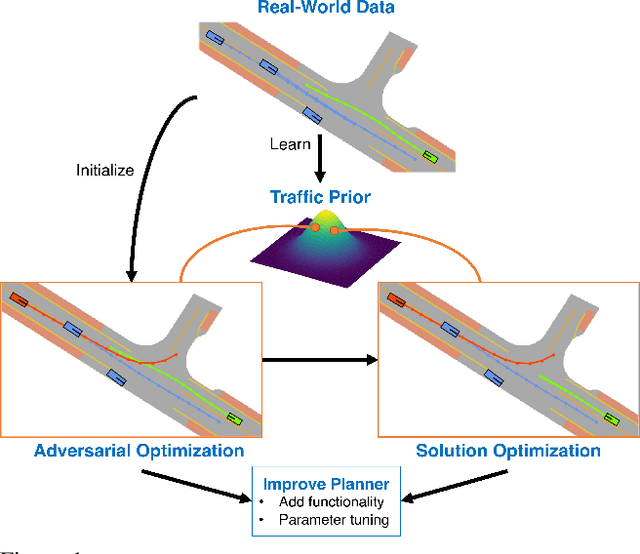

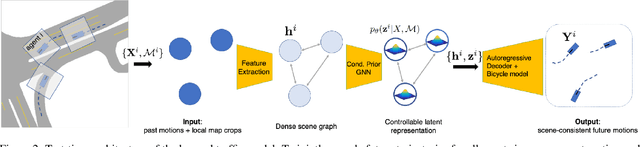

Evaluating and improving planning for autonomous vehicles requires scalable generation of long-tail traffic scenarios. To be useful, these scenarios must be realistic and challenging, but not impossible to drive through safely. In this work, we introduce STRIVE, a method to automatically generate challenging scenarios that cause a given planner to produce undesirable behavior, like collisions. To maintain scenario plausibility, the key idea is to leverage a learned model of traffic motion in the form of a graph-based conditional VAE. Scenario generation is formulated as an optimization in the latent space of this traffic model, effected by perturbing an initial real-world scene to produce trajectories that collide with a given planner. A subsequent optimization is used to find a "solution" to the scenario, ensuring it is useful to improve the given planner. Further analysis clusters generated scenarios based on collision type. We attack two planners and show that STRIVE successfully generates realistic, challenging scenarios in both cases. We additionally "close the loop" and use these scenarios to optimize hyperparameters of a rule-based planner.
Multiway Non-rigid Point Cloud Registration via Learned Functional Map Synchronization
Nov 25, 2021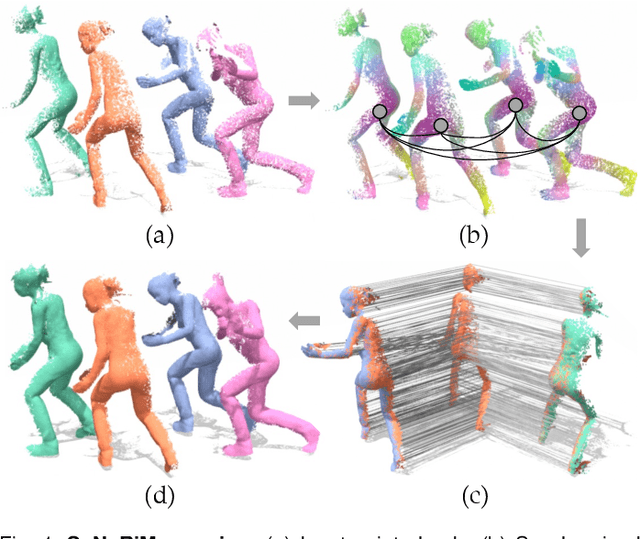
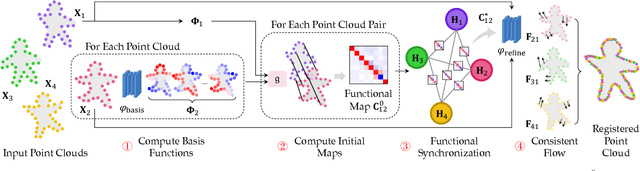
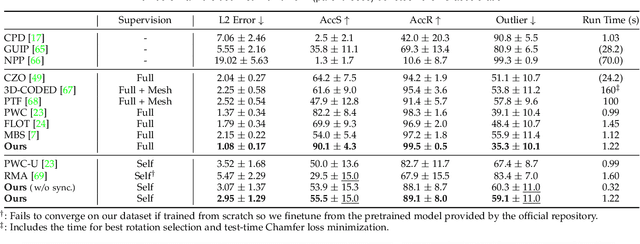
We present SyNoRiM, a novel way to jointly register multiple non-rigid shapes by synchronizing the maps relating learned functions defined on the point clouds. Even though the ability to process non-rigid shapes is critical in various applications ranging from computer animation to 3D digitization, the literature still lacks a robust and flexible framework to match and align a collection of real, noisy scans observed under occlusions. Given a set of such point clouds, our method first computes the pairwise correspondences parameterized via functional maps. We simultaneously learn potentially non-orthogonal basis functions to effectively regularize the deformations, while handling the occlusions in an elegant way. To maximally benefit from the multi-way information provided by the inferred pairwise deformation fields, we synchronize the pairwise functional maps into a cycle-consistent whole thanks to our novel and principled optimization formulation. We demonstrate via extensive experiments that our method achieves a state-of-the-art performance in registration accuracy, while being flexible and efficient as we handle both non-rigid and multi-body cases in a unified framework and avoid the costly optimization over point-wise permutations by the use of basis function maps.
Unsupervised Discovery of Object Radiance Fields
Jul 16, 2021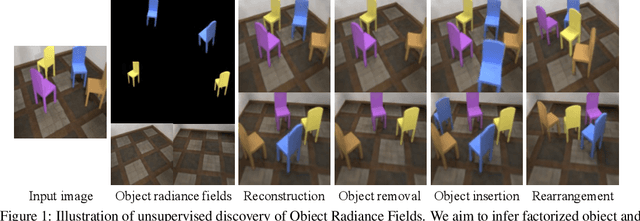

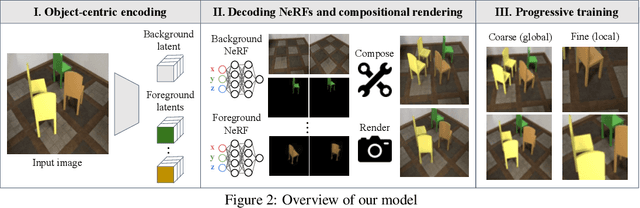
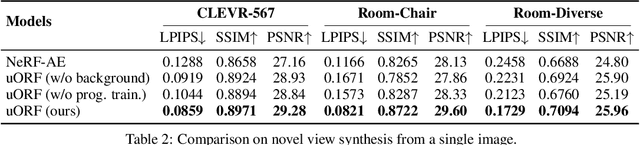
We study the problem of inferring an object-centric scene representation from a single image, aiming to derive a representation that explains the image formation process, captures the scene's 3D nature, and is learned without supervision. Most existing methods on scene decomposition lack one or more of these characteristics, due to the fundamental challenge in integrating the complex 3D-to-2D image formation process into powerful inference schemes like deep networks. In this paper, we propose unsupervised discovery of Object Radiance Fields (uORF), integrating recent progresses in neural 3D scene representations and rendering with deep inference networks for unsupervised 3D scene decomposition. Trained on multi-view RGB images without annotations, uORF learns to decompose complex scenes with diverse, textured background from a single image. We show that uORF performs well on unsupervised 3D scene segmentation, novel view synthesis, and scene editing on three datasets.
HuMoR: 3D Human Motion Model for Robust Pose Estimation
May 10, 2021



We introduce HuMoR: a 3D Human Motion Model for Robust Estimation of temporal pose and shape. Though substantial progress has been made in estimating 3D human motion and shape from dynamic observations, recovering plausible pose sequences in the presence of noise and occlusions remains a challenge. For this purpose, we propose an expressive generative model in the form of a conditional variational autoencoder, which learns a distribution of the change in pose at each step of a motion sequence. Furthermore, we introduce a flexible optimization-based approach that leverages HuMoR as a motion prior to robustly estimate plausible pose and shape from ambiguous observations. Through extensive evaluations, we demonstrate that our model generalizes to diverse motions and body shapes after training on a large motion capture dataset, and enables motion reconstruction from multiple input modalities including 3D keypoints and RGB(-D) videos.
CAPTRA: CAtegory-level Pose Tracking for Rigid and Articulated Objects from Point Clouds
Apr 08, 2021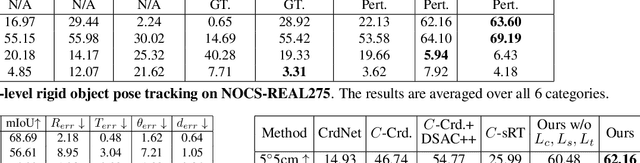
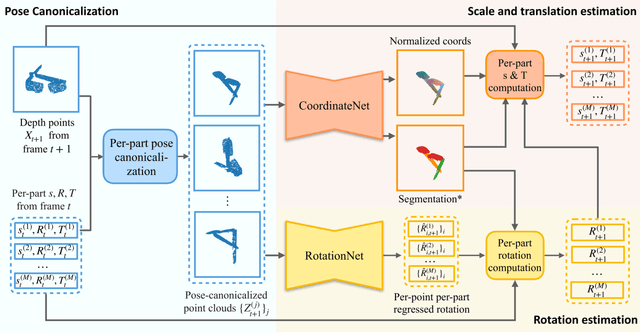
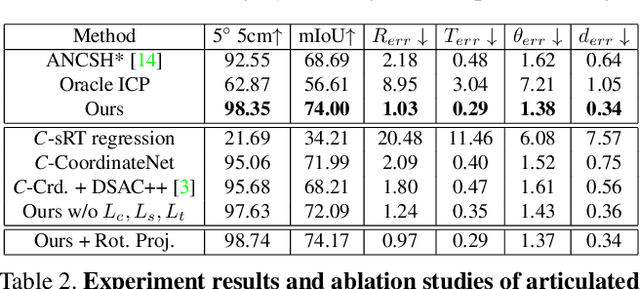
In this work, we tackle the problem of category-level online pose tracking of objects from point cloud sequences. For the first time, we propose a unified framework that can handle 9DoF pose tracking for novel rigid object instances as well as per-part pose tracking for articulated objects from known categories. Here the 9DoF pose, comprising 6D pose and 3D size, is equivalent to a 3D amodal bounding box representation with free 6D pose. Given the depth point cloud at the current frame and the estimated pose from the last frame, our novel end-to-end pipeline learns to accurately update the pose. Our pipeline is composed of three modules: 1) a pose canonicalization module that normalizes the pose of the input depth point cloud; 2) RotationNet, a module that directly regresses small interframe delta rotations; and 3) CoordinateNet, a module that predicts the normalized coordinates and segmentation, enabling analytical computation of the 3D size and translation. Leveraging the small pose regime in the pose-canonicalized point clouds, our method integrates the best of both worlds by combining dense coordinate prediction and direct rotation regression, thus yielding an end-to-end differentiable pipeline optimized for 9DoF pose accuracy (without using non-differentiable RANSAC). Our extensive experiments demonstrate that our method achieves new state-of-the-art performance on category-level rigid object pose (NOCS-REAL275) and articulated object pose benchmarks (SAPIEN , BMVC) at the fastest FPS ~12.
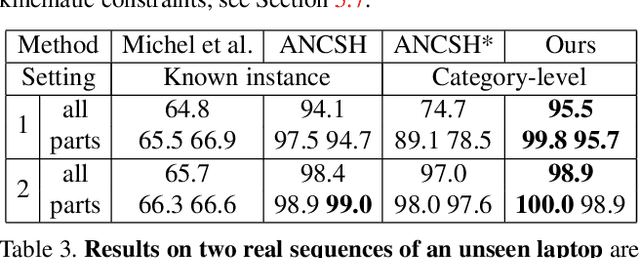
Weakly Supervised Learning of Rigid 3D Scene Flow
Feb 17, 2021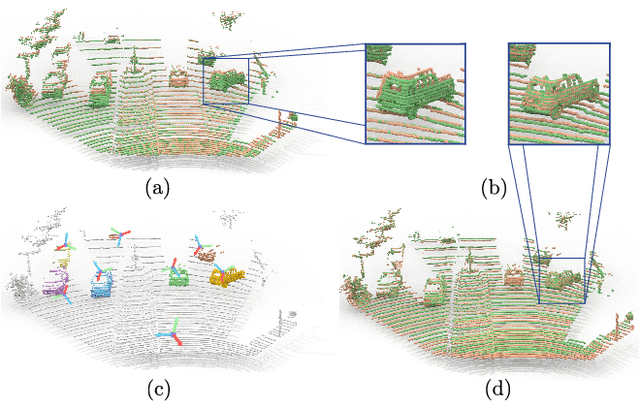
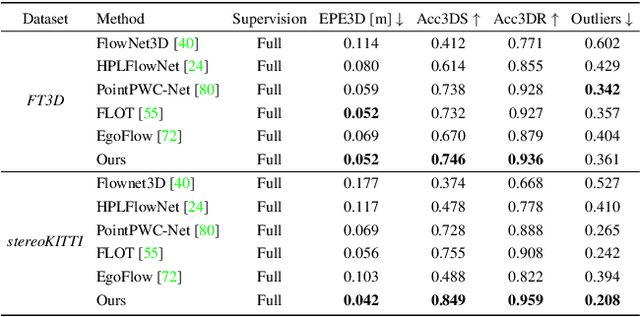
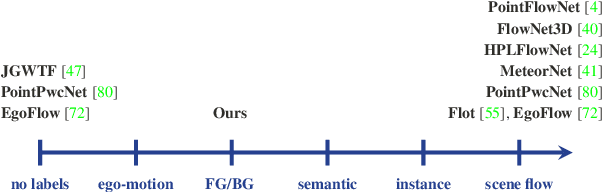
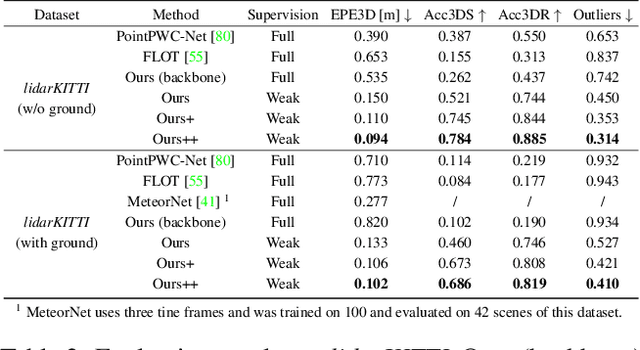
We propose a data-driven scene flow estimation algorithm exploiting the observation that many 3D scenes can be explained by a collection of agents moving as rigid bodies. At the core of our method lies a deep architecture able to reason at the \textbf{object-level} by considering 3D scene flow in conjunction with other 3D tasks. This object level abstraction, enables us to relax the requirement for dense scene flow supervision with simpler binary background segmentation mask and ego-motion annotations. Our mild supervision requirements make our method well suited for recently released massive data collections for autonomous driving, which do not contain dense scene flow annotations. As output, our model provides low-level cues like pointwise flow and higher-level cues such as holistic scene understanding at the level of rigid objects. We further propose a test-time optimization refining the predicted rigid scene flow. We showcase the effectiveness and generalization capacity of our method on four different autonomous driving datasets. We release our source code and pre-trained models under \url{github.com/zgojcic/Rigid3DSceneFlow}.
3DIoUMatch: Leveraging IoU Prediction for Semi-Supervised 3D Object Detection
Dec 08, 2020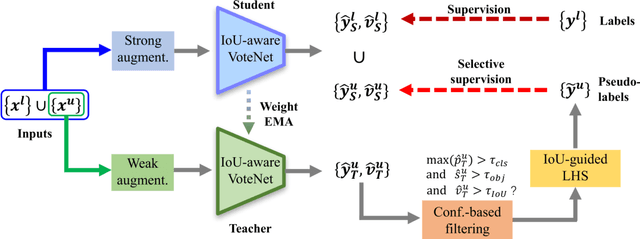
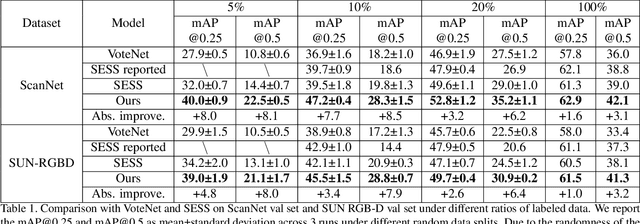
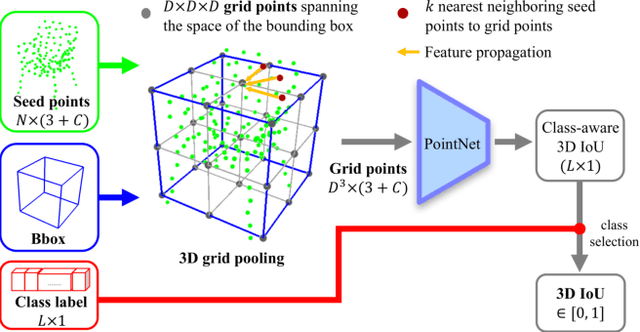
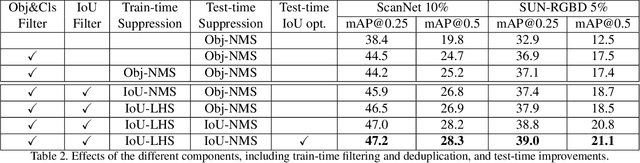
3D object detection is an important yet demanding task that heavily relies on difficult to obtain 3D annotations. To reduce the required amount of supervision, we propose 3DIoUMatch, a novel method for semi-supervised 3D object detection. We adopt VoteNet, a popular point cloud-based object detector, as our backbone and leverage a teacher-student mutual learning framework to propagate information from the labeled to the unlabeled train set in the form of pseudo-labels. However, due to the high task complexity, we observe that the pseudo-labels suffer from significant noise and are thus not directly usable. To that end, we introduce a confidence-based filtering mechanism. The key to our approach is a novel differentiable 3D IoU estimation module. This module is used for filtering poorly localized proposals as well as for IoU-guided bounding box deduplication. At inference time, this module is further utilized to improve localization through test-time optimization. Our method consistently improves state-of-the-art methods on both ScanNet and SUN-RGBD benchmarks by significant margins. For example, when training using only 10\% labeled data on ScanNet, 3DIoUMatch achieves 7.7 absolute improvement on mAP@0.25 and 8.5 absolute improvement on mAP@0.5 upon the prior art.
A Point-Cloud Deep Learning Framework for Prediction of Fluid Flow Fields on Irregular Geometries
Oct 15, 2020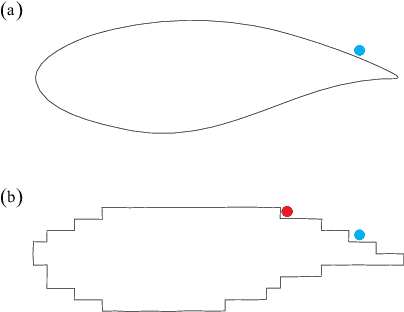
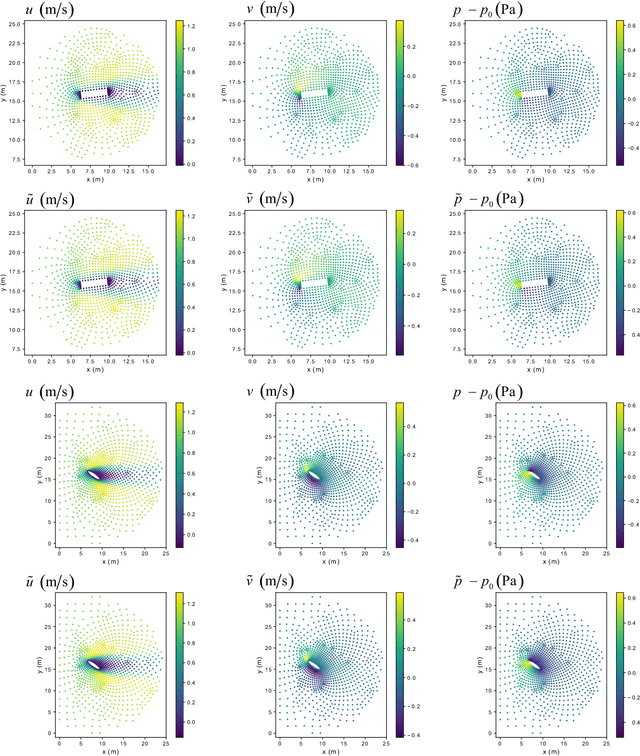
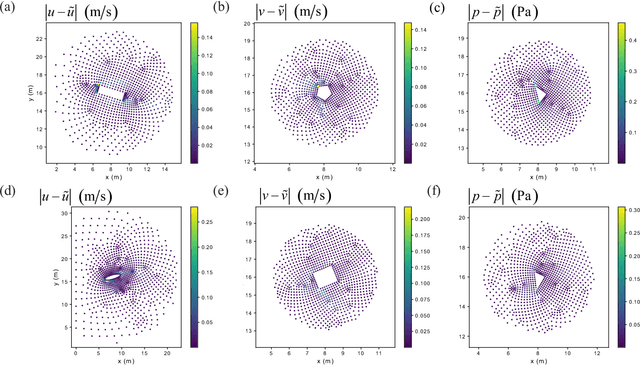
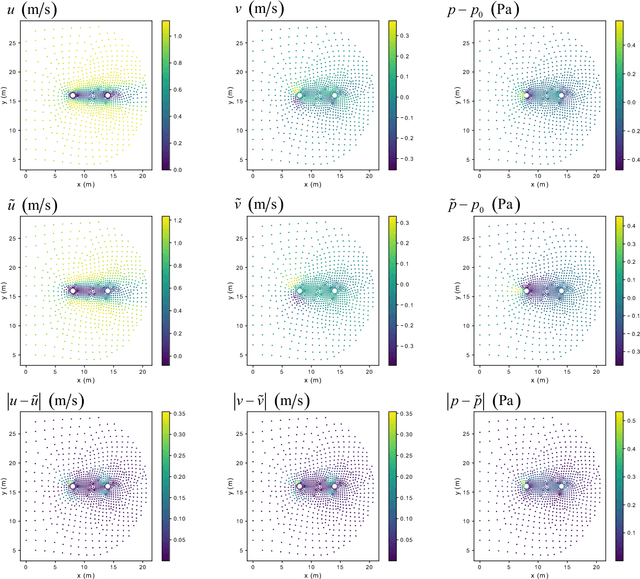
We present a novel deep learning framework for flow field predictions in irregular domains when the solution is a function of the geometry of either the domain or objects inside the domain. Grid vertices in a computational fluid dynamics (CFD) domain are viewed as point clouds and used as inputs to a neural network based on the PointNet architecture, which learns an end-to-end mapping between spatial positions and CFD quantities. Using our approach, (i) the network inherits desirable features of unstructured meshes (e.g., fine and coarse point spacing near the object surface and in the far field, respectively), which minimizes network training cost; (ii) object geometry is accurately represented through vertices located on object boundaries, which maintains boundary smoothness and allows the network to detect small changes between geometries; and (iii) no data interpolation is utilized for creating training data; thus accuracy of the CFD data is preserved. None of these features are achievable by extant methods based on projecting scattered CFD data into Cartesian grids and then using regular convolutional neural networks. Incompressible laminar steady flow past a cylinder with various shapes for its cross section is considered. The mass and momentum of predicted fields are conserved. For the first time, our network generalizes the predictions to multiple objects as well as an airfoil, even though only single objects and no airfoils are observed during training. The network predicts the flow fields hundreds of times faster than our conventional CFD solver, while maintaining excellent to reasonable accuracy.
IF-Defense: 3D Adversarial Point Cloud Defense via Implicit Function based Restoration
Oct 11, 2020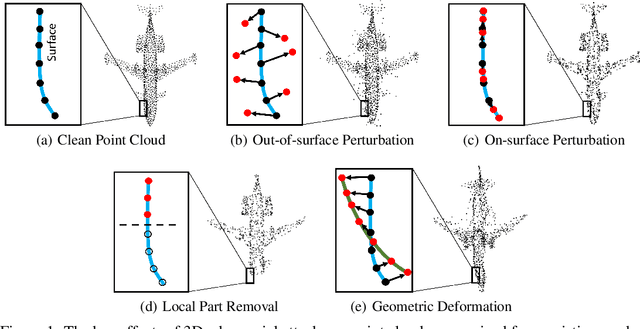
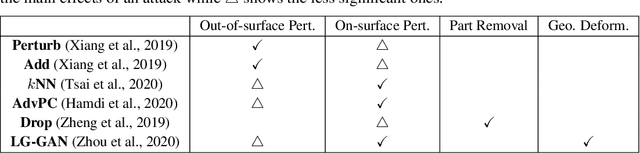
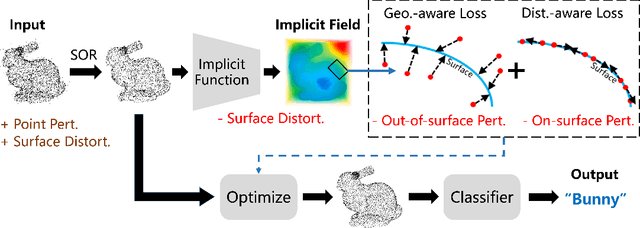

Point cloud is an important 3D data representation widely used in many essential applications. Leveraging deep neural networks, recent works have shown great success in processing 3D point clouds. However, those deep neural networks are vulnerable to various 3D adversarial attacks, which can be summarized as two primary types: point perturbation that affects local point distribution, and surface distortion that causes dramatic changes in geometry. In this paper, we propose a novel 3D adversarial point cloud defense method leveraging implicit function based restoration (IF-Defense) to address both the aforementioned attacks. It is composed of two steps: 1) it predicts an implicit function that captures the clean shape through a surface recovery module, and 2) restores a clean and complete point cloud via minimizing the difference between the attacked point cloud and the predicted implicit function under geometry- and distribution- aware constraints. Our experimental results show that IF-Defense achieves the state-of-the-art defense performance against all existing adversarial attacks on PointNet, PointNet++, DGCNN and PointConv. Comparing with previous methods, IF-Defense presents 20.02% improvement in classification accuracy against salient point dropping attack and 16.29% against LG-GAN attack on PointNet.