 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHiFloat4 Format for Language Model Pre-training on Ascend NPUs
Apr 09, 2026Large foundation models have become central to modern machine learning, with performance scaling predictably with model size and data. However, training and deploying such models incur substantial computational and memory costs, motivating the development of low-precision training techniques. Recent work has demonstrated that 4-bit floating-point (FP4) formats--such as MXFP4 and NVFP4--can be successfully applied to linear GEMM operations in large language models (LLMs), achieving up to 4x improvements in compute throughput and memory efficiency compared to higher-precision baselines. In this work, we investigate the recently proposed HiFloat4 FP4 format for Huawei Ascend NPUs and systematically compare it with MXFP4 in large-scale training settings. All experiments are conducted on Ascend NPU clusters, with linear and expert GEMM operations performed entirely in FP4 precision. We evaluate both dense architectures (e.g., Pangu and LLaMA-style models) and mixture-of-experts (MoE) models, where both standard linear layers and expert-specific GEMMs operate in FP4. Furthermore, we explore stabilization techniques tailored to FP4 training that significantly reduce numerical degradation, maintaining relative error within 1% of full-precision baselines while preserving the efficiency benefits of 4-bit computation. Our results provide a comprehensive empirical study of FP4 training on NPUs and highlight the practical trade-offs between FP4 formats in large-scale dense and MoE models.
Impact-Aware Bimanual Catching of Large-Momentum Objects
Mar 25, 2024



This paper investigates one of the most challenging tasks in dynamic manipulation -- catching large-momentum moving objects. Beyond the realm of quasi-static manipulation, dealing with highly dynamic objects can significantly improve the robot's capability of interacting with its surrounding environment. Yet, the inevitable motion mismatch between the fast moving object and the approaching robot will result in large impulsive forces, which lead to the unstable contacts and irreversible damage to both the object and the robot. To address the above problems, we propose an online optimization framework to: 1) estimate and predict the linear and angular motion of the object; 2) search and select the optimal contact locations across every surface of the object to mitigate impact through sequential quadratic programming (SQP); 3) simultaneously optimize the end-effector motion, stiffness, and contact force for both robots using multi-mode trajectory optimization (MMTO); and 4) realise the impact-aware catching motion on the compliant robotic system based on indirect force controller. We validate the impulse distribution, contact selection, and impact-aware MMTO algorithms in simulation and demonstrate the benefits of the proposed framework in real-world experiments including catching large-momentum moving objects with well-defined motion, constrained motion and free-flying motion.
Dynamic Feature-based Deep Reinforcement Learning for Flow Control of Circular Cylinder with Sparse Surface Pressure Sensing
Jul 28, 2023This study proposes a self-learning algorithm for closed-loop cylinder wake control targeting lower drag and lower lift fluctuations with the additional challenge of sparse sensor information, taking deep reinforcement learning as the starting point. DRL performance is significantly improved by lifting the sensor signals to dynamic features (DF), which predict future flow states. The resulting dynamic feature-based DRL (DF-DRL) automatically learns a feedback control in the plant without a dynamic model. Results show that the drag coefficient of the DF-DRL model is 25% less than the vanilla model based on direct sensor feedback. More importantly, using only one surface pressure sensor, DF-DRL can reduce the drag coefficient to a state-of-the-art performance of about 8% at Re = 100 and significantly mitigate lift coefficient fluctuations. Hence, DF-DRL allows the deployment of sparse sensing of the flow without degrading the control performance. This method also shows good robustness in controlling flow under higher Reynolds numbers, which reduces the drag coefficient by 32.2% and 46.55% at Re = 500 and 1000, respectively, indicating the broad applicability of the method. Since surface pressure information is more straightforward to measure in realistic scenarios than flow velocity information, this study provides a valuable reference for experimentally designing the active flow control of a circular cylinder based on wall pressure signals, which is an essential step toward further developing intelligent control in realistic multi-input multi-output (MIMO) system.
Underlaid Sensing Pilot for Integrated Sensing and Communications
Jul 24, 2023



This paper investigates a novel underlaid sensing pilot signal design for integrated sensing and communications (ISAC) in an OFDM-based communication system. The proposed two-dimensional (2D) pilot signal is first generated on the delay-Doppler (DD) plane and then converted to the time-frequency (TF) plane for multiplexing with the OFDM data symbols. The sensing signal underlays the OFDM data, allowing for the sharing of time-frequency resources. In this framework, sensing detection is implemented based on a simple 2D correlation, taking advantage of the favorable auto-correlation properties of the sensing pilot. In the communication part, the sensing pilot, served as a known signal, can be utilized for channel estimation and equalization to ensure optimal symbol detection performance. The underlaid sensing pilot demonstrates good scalability and can adapt to different delay and Doppler resolution requirements without violating the OFDM frame structure. Experimental results show the effective sensing performance of the proposed pilot, with only a small fraction of power shared from the OFDM data, while maintaining satisfactory symbol detection performance in communication.
QoE-based Semantic-Aware Resource Allocation for Multi-Task Networks
May 11, 2023



In semantic communications, only task-relevant information is transmitted, yielding significant performance gains over conventional communications. To satisfy user requirements for different tasks, we investigate the semantic-aware resource allocation in a multi-cell network for serving multiple tasks in this paper. First, semantic entropy is defined and quantified to measure the semantic information for different tasks. Then, we develop a novel quality-of-experience (QoE) model to formulate the semantic-aware resource allocation problem in terms of semantic compression, channel assignment, and transmit power allocation. To solve the formulated problem, we first decouple it into two subproblems. The first one is to optimize semantic compression with given channel assignment and power allocation results, which is solved by a developed deep Q-network (DQN) based method. The second one is to optimize the channel assignment and transmit power, which is modeled as a many-to-one matching game and solved by a proposed low-complexity matching algorithm. Simulation results validate the effectiveness and superiority of the proposed semantic-aware resource allocation method, as well as its compatibility with conventional and semantic communications.
ROS-PyBullet Interface: A Framework for Reliable Contact Simulation and Human-Robot Interaction
Oct 13, 2022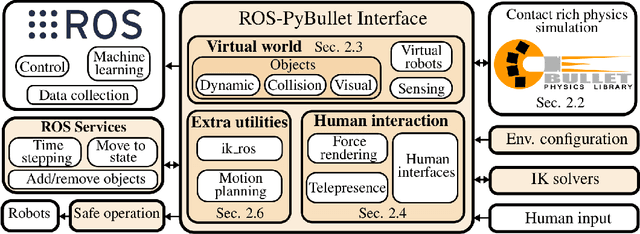
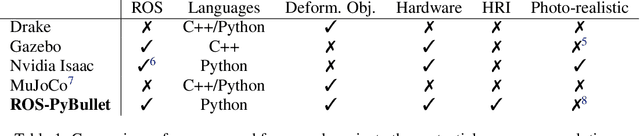
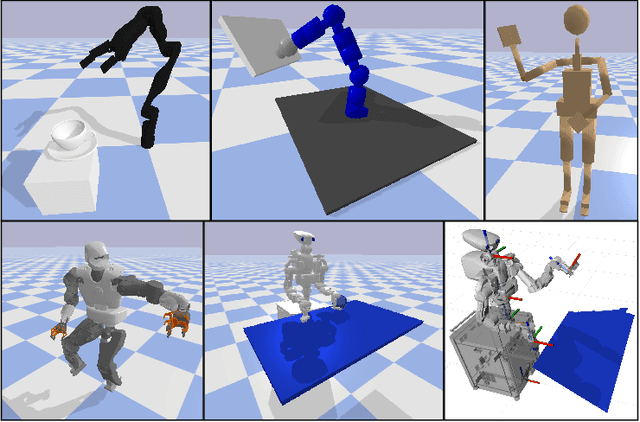
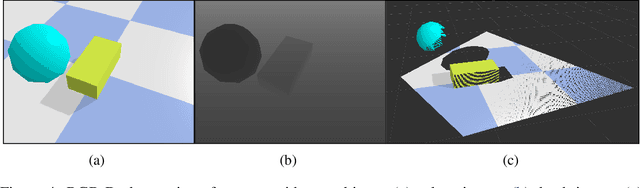
Reliable contact simulation plays a key role in the development of (semi-)autonomous robots, especially when dealing with contact-rich manipulation scenarios, an active robotics research topic. Besides simulation, components such as sensing, perception, data collection, robot hardware control, human interfaces, etc. are all key enablers towards applying machine learning algorithms or model-based approaches in real world systems. However, there is a lack of software connecting reliable contact simulation with the larger robotics ecosystem (i.e. ROS, Orocos), for a more seamless application of novel approaches, found in the literature, to existing robotic hardware. In this paper, we present the ROS-PyBullet Interface, a framework that provides a bridge between the reliable contact/impact simulator PyBullet and the Robot Operating System (ROS). Furthermore, we provide additional utilities for facilitating Human-Robot Interaction (HRI) in the simulated environment. We also present several use-cases that highlight the capabilities and usefulness of our framework. Please check our video, source code, and examples included in the supplementary material. Our full code base is open source and can be found at https://github.com/cmower/ros_pybullet_interface.
Reinforcement Learning for Cognitive Delay/Disruption Tolerant Network Node Management in an LEO-based Satellite Constellation
Sep 27, 2022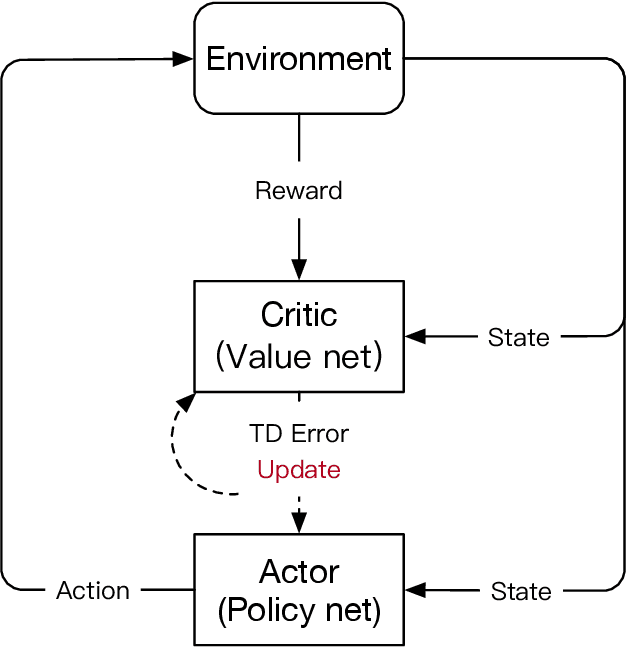
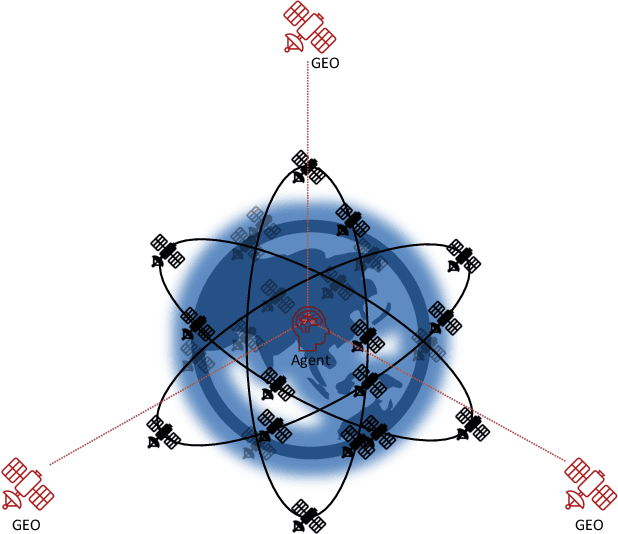
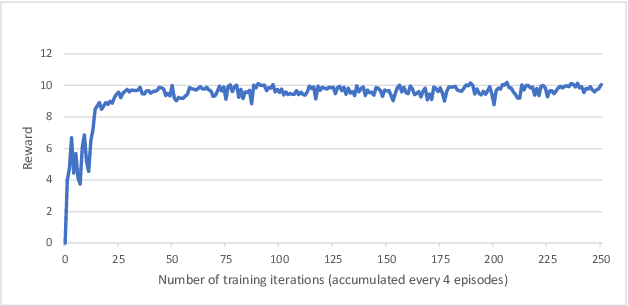
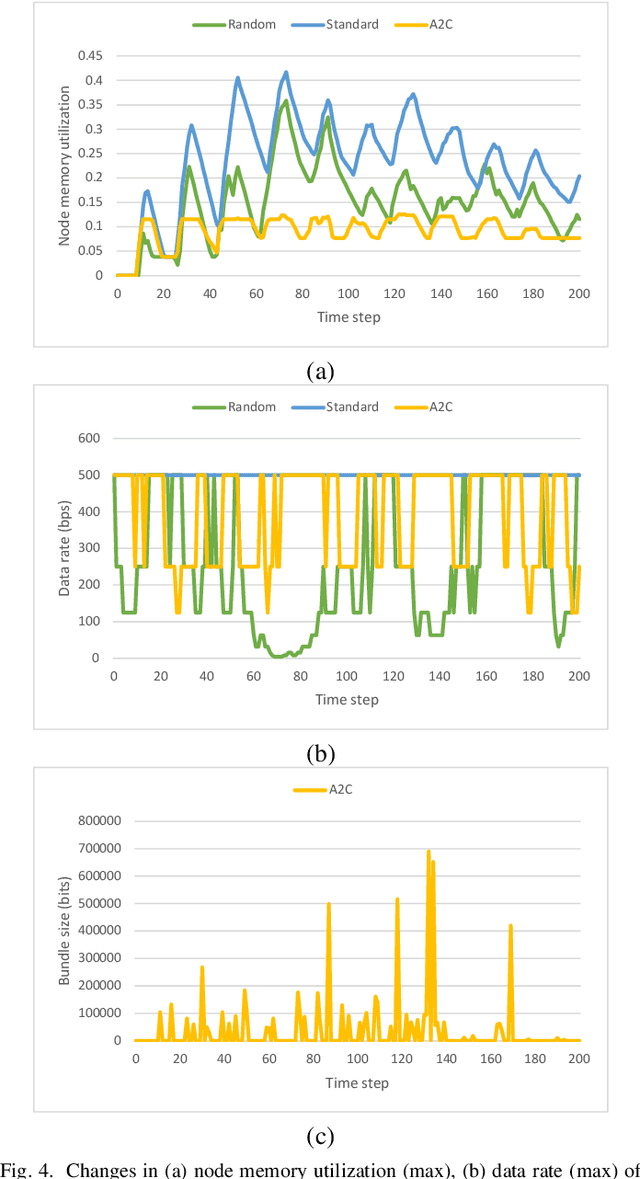
In recent years, with the large-scale deployment of space spacecraft entities and the increase of satellite onboard capabilities, delay/disruption tolerant network (DTN) emerged as a more robust communication protocol than TCP/IP in the case of excessive network dynamics. DTN node buffer management is still an active area of research, as the current implementation of the DTN core protocol still relies on the assumption that there is always enough memory available in different network nodes to store and forward bundles. In addition, the classical queuing theory does not apply to the dynamic management of DTN node buffers. Therefore, this paper proposes a centralized approach to automatically manage cognitive DTN nodes in low earth orbit (LEO) satellite constellation scenarios based on the advanced reinforcement learning (RL) strategy advantage actor-critic (A2C). The method aims to explore training a geosynchronous earth orbit intelligent agent to manage all DTN nodes in an LEO satellite constellation scenario. The goal of the A2C agent is to maximize delivery success rate and minimize network resource consumption cost while considering node memory utilization. The intelligent agent can dynamically adjust the radio data rate and perform drop operations based on bundle priority. In order to measure the effectiveness of applying A2C technology to DTN node management issues in LEO satellite constellation scenarios, this paper compares the trained intelligent agent strategy with the other two non-RL policies, including random and standard policies. Experiments show that the A2C strategy balances delivery success rate and cost, and provides the highest reward and the lowest node memory utilization.
QoE-Aware Resource Allocation for Semantic Communication Networks
May 28, 2022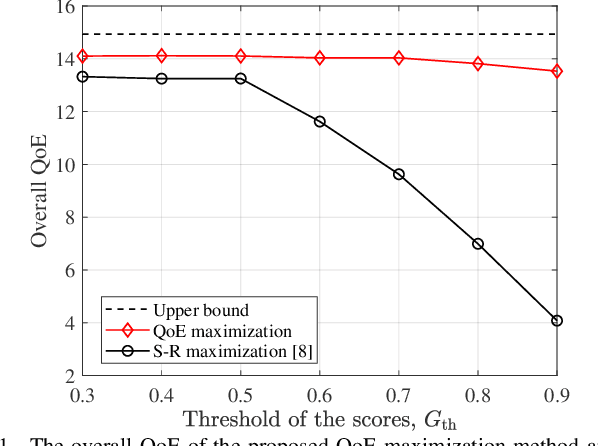
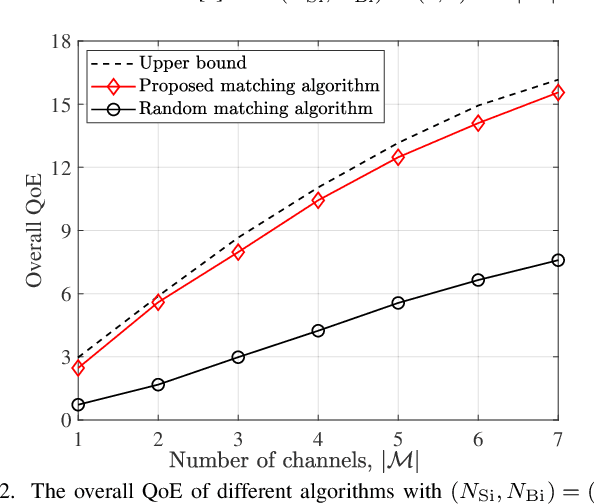
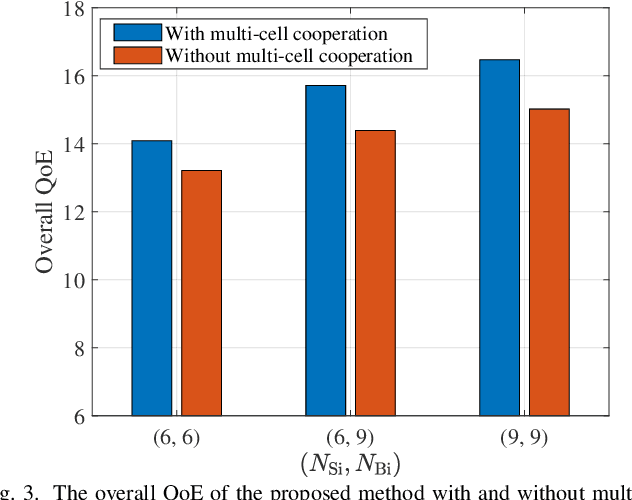
With the aim of accomplishing intelligence tasks, semantic communications transmit task-related information only, yielding significant performance gains over conventional communications. To guarantee user requirements for different types of tasks, we perform the semantic-aware resource allocation in a multi-cell multi-task network in this paper. Specifically, an approximate measure of semantic entropy is first developed to quantify the semantic information for different tasks, based on which a novel quality-of-experience (QoE) model is proposed. We formulate the QoE-aware semantic resource allocation in terms of the number of transmitted semantic symbols, channel assignment, and power allocation. To solve this problem, we first decouple it into two independent subproblems. The first one is to optimize the number of transmitted semantic symbols with given channel assignment and power allocation, which is solved by the exhaustive searching method. The second one is the channel assignment and power allocation subproblem, which is modeled as a many-to-one matching game and solved by the proposed low-complexity matching algorithm. Simulation results demonstrate the effectiveness and superiority of the proposed method on the overall QoE.
Improving the estimation of directional area scattering factor (DASF) from canopy reflectance: theoretical basis and validation
Apr 28, 2022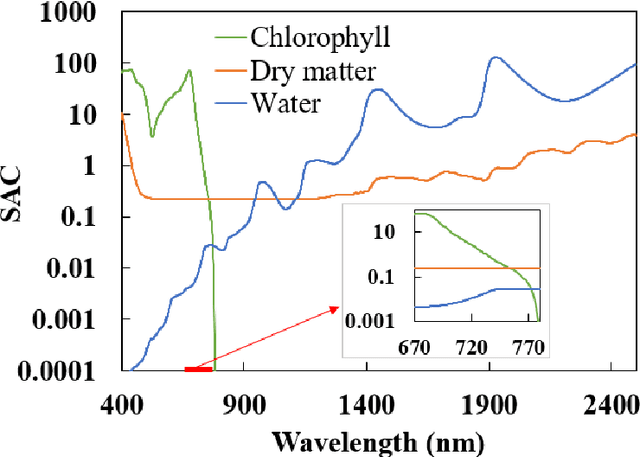
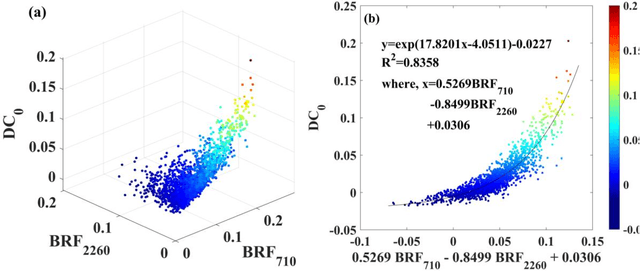
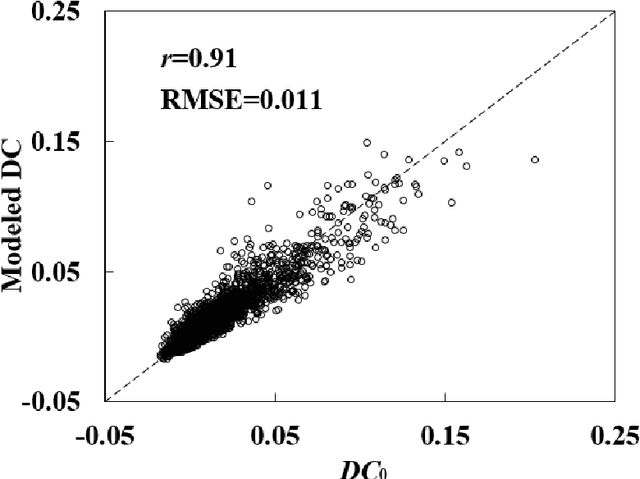
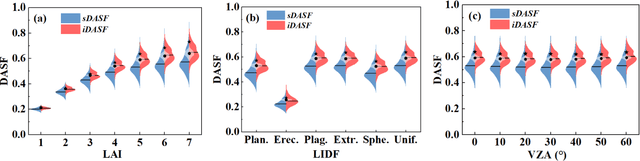
Directional area scattering factor (DASF) is a critical canopy structural parameter for vegetation monitoring. It provides an efficient tool for decoupling of canopy structure and leaf optics from canopy reflectance. Current standard approach to estimate DASF from canopy bidirectional reflectance factor (BRF) is based on the assumption that in the weakly absorbing 710 to 790 nm spectral interval, leaf scattering does not change much with the concentration of dry matter and thus its variation can be neglected. This results in biased estimates of DASF and consequently leads to uncertainty in DASF-related applications. This study proposes a new approach to account for variations in concentrations of this biochemical constituent, which additionally uses the canopy BRF at 2260 nm. In silico analysis of the proposed approach suggests significant increase in accuracy over the standard technique by a relative root mean square error (rRMSE) of 49% and 34% for one- and three dimensional scenes, respectively. When compared with indoor multi-angular hyperspectral measurements reported in literature, the mean absolute error has reduced by 68% for needle leaf and 20% for broadleaf canopies. Thus, the proposed DASF estimation approach outperforms the current one and can be used more reliably in DASF-related applications, such as vegetation monitoring of functional traits, dynamics, and radiation budget.
Whole-Body Control for Velocity-Controlled Mobile Collaborative Robots Using Coupling Dynamic Movement Primitives
Mar 07, 2022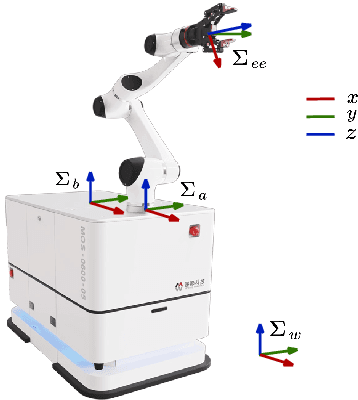
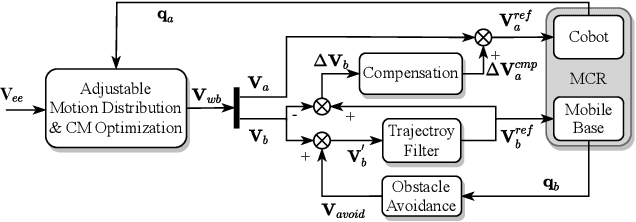
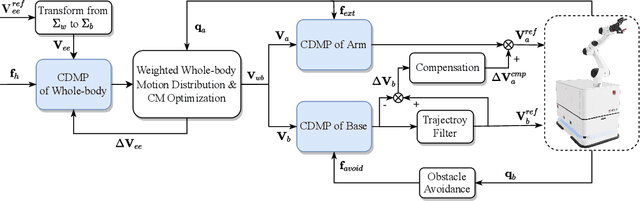
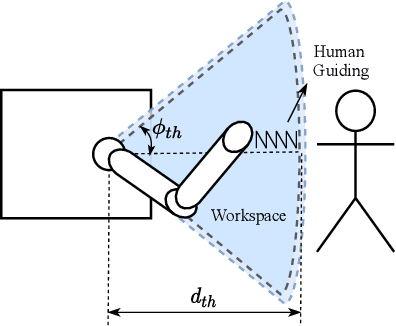
In this paper, we propose a unified whole-body control framework for velocity-controlled mobile collaborative robots which can distribute task motion into the base and arm according to specific task requirements by adjusting weighting factors. Our framework focuses on addressing two challenging issues in whole-body coordination: 1) different dynamic characteristics of base and arm; 2) avoidance of violating constraints of both safety and configuration. In addition, our controller involves Coupling Dynamic Movement Primitive to enable the essential compliance capabilities for collaboration and interaction applications, such as obstacle avoidance, hand guiding, and force control. Based on these, we design a motion mode of intuitive physical human-robot interaction through an adjusting strategy of the weighting factors. The proposed controller is in closed-form and thus quite computationally efficient against the-state-of-art optimization-based methods. Experimental results of a real mobile collaborative robot validate the effectiveness of the proposed controller. The documented video of the experiments is available at https://youtu.be/x2Z593dV9C8.