 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRoboBrain 2.0 Technical Report
Jul 02, 2025We introduce RoboBrain 2.0, our latest generation of embodied vision-language foundation models, designed to unify perception, reasoning, and planning for complex embodied tasks in physical environments. It comes in two variants: a lightweight 7B model and a full-scale 32B model, featuring a heterogeneous architecture with a vision encoder and a language model. Despite its compact size, RoboBrain 2.0 achieves strong performance across a wide spectrum of embodied reasoning tasks. On both spatial and temporal benchmarks, the 32B variant achieves leading results, surpassing prior open-source and proprietary models. In particular, it supports key real-world embodied AI capabilities, including spatial understanding (e.g., affordance prediction, spatial referring, trajectory forecasting) and temporal decision-making (e.g., closed-loop interaction, multi-agent long-horizon planning, and scene graph updating). This report details the model architecture, data construction, multi-stage training strategies, infrastructure and practical applications. We hope RoboBrain 2.0 advances embodied AI research and serves as a practical step toward building generalist embodied agents. The code, checkpoint and benchmark are available at https://superrobobrain.github.io.
Reinforcement Learning for Cognitive Delay/Disruption Tolerant Network Node Management in an LEO-based Satellite Constellation
Sep 27, 2022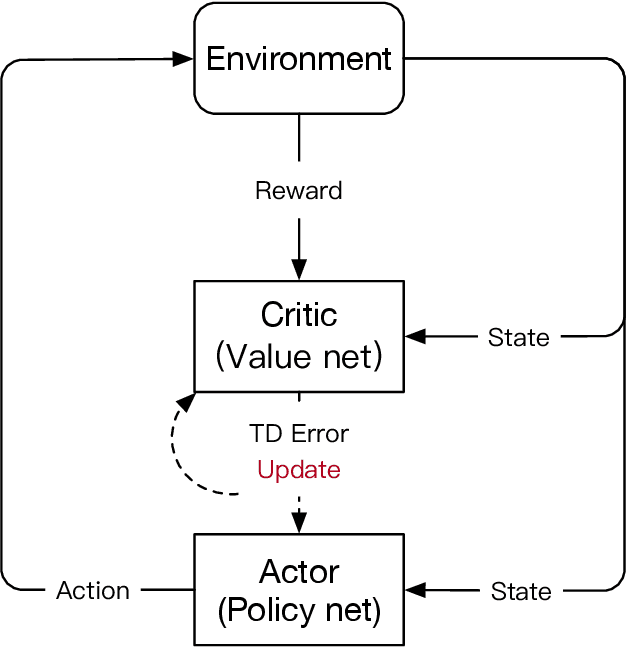
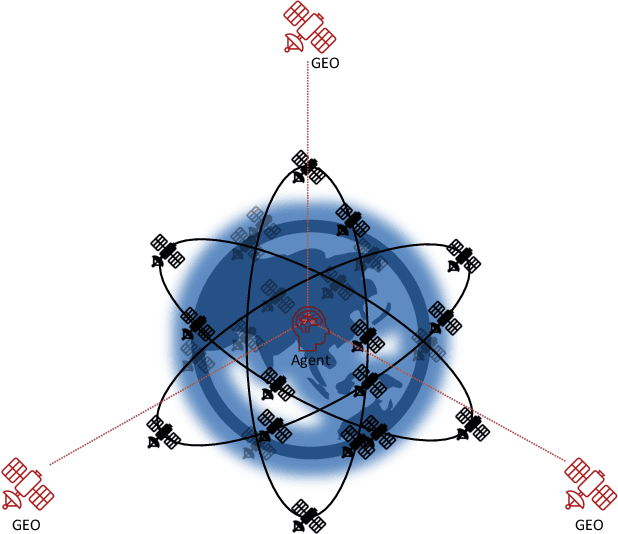
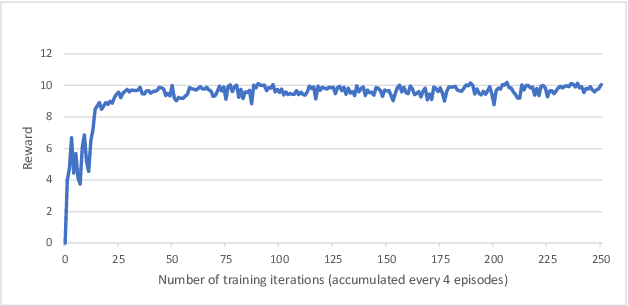
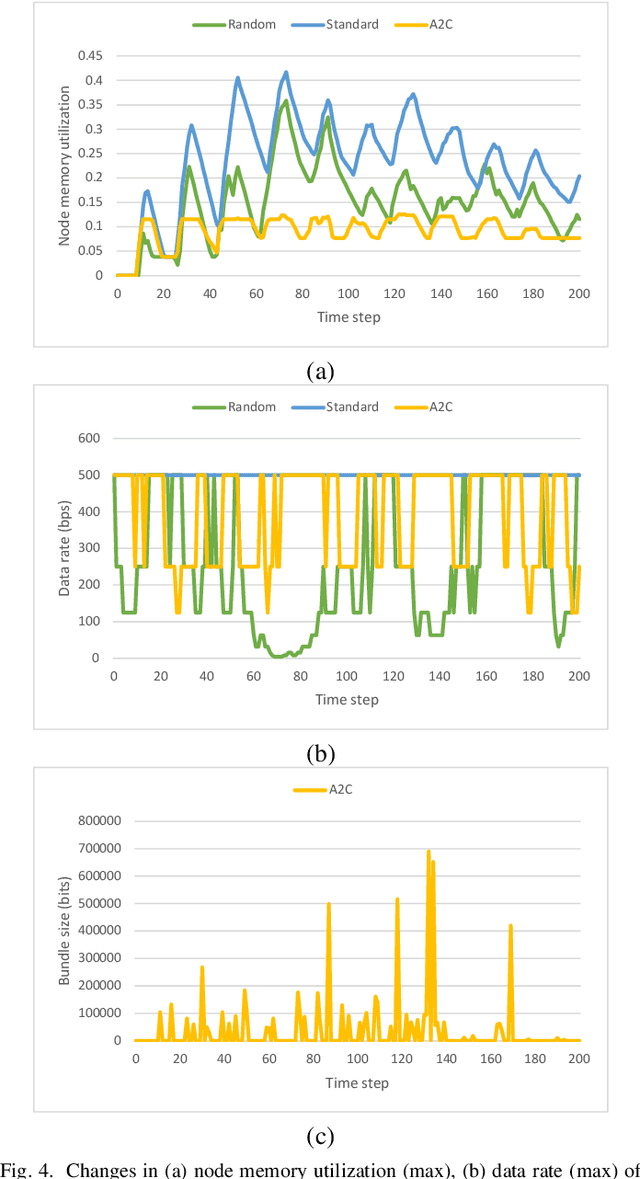
In recent years, with the large-scale deployment of space spacecraft entities and the increase of satellite onboard capabilities, delay/disruption tolerant network (DTN) emerged as a more robust communication protocol than TCP/IP in the case of excessive network dynamics. DTN node buffer management is still an active area of research, as the current implementation of the DTN core protocol still relies on the assumption that there is always enough memory available in different network nodes to store and forward bundles. In addition, the classical queuing theory does not apply to the dynamic management of DTN node buffers. Therefore, this paper proposes a centralized approach to automatically manage cognitive DTN nodes in low earth orbit (LEO) satellite constellation scenarios based on the advanced reinforcement learning (RL) strategy advantage actor-critic (A2C). The method aims to explore training a geosynchronous earth orbit intelligent agent to manage all DTN nodes in an LEO satellite constellation scenario. The goal of the A2C agent is to maximize delivery success rate and minimize network resource consumption cost while considering node memory utilization. The intelligent agent can dynamically adjust the radio data rate and perform drop operations based on bundle priority. In order to measure the effectiveness of applying A2C technology to DTN node management issues in LEO satellite constellation scenarios, this paper compares the trained intelligent agent strategy with the other two non-RL policies, including random and standard policies. Experiments show that the A2C strategy balances delivery success rate and cost, and provides the highest reward and the lowest node memory utilization.