 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeA DeepSeek-Powered AI System for Automated Chest Radiograph Interpretation in Clinical Practice
Dec 23, 2025



A global shortage of radiologists has been exacerbated by the significant volume of chest X-ray workloads, particularly in primary care. Although multimodal large language models show promise, existing evaluations predominantly rely on automated metrics or retrospective analyses, lacking rigorous prospective clinical validation. Janus-Pro-CXR (1B), a chest X-ray interpretation system based on DeepSeek Janus-Pro model, was developed and rigorously validated through a multicenter prospective trial (NCT07117266). Our system outperforms state-of-the-art X-ray report generation models in automated report generation, surpassing even larger-scale models including ChatGPT 4o (200B parameters), while demonstrating reliable detection of six clinically critical radiographic findings. Retrospective evaluation confirms significantly higher report accuracy than Janus-Pro and ChatGPT 4o. In prospective clinical deployment, AI assistance significantly improved report quality scores, reduced interpretation time by 18.3% (P < 0.001), and was preferred by a majority of experts in 54.3% of cases. Through lightweight architecture and domain-specific optimization, Janus-Pro-CXR improves diagnostic reliability and workflow efficiency, particularly in resource-constrained settings. The model architecture and implementation framework will be open-sourced to facilitate the clinical translation of AI-assisted radiology solutions.
A Large Language Model Based Method for Complex Logical Reasoning over Knowledge Graphs
Dec 22, 2025



Reasoning over knowledge graphs (KGs) with first-order logic (FOL) queries is challenging due to the inherent incompleteness of real-world KGs and the compositional complexity of logical query structures. Most existing methods rely on embedding entities and relations into continuous geometric spaces and answer queries via differentiable set operations. While effective for simple query patterns, these approaches often struggle to generalize to complex queries involving multiple operators, deeper reasoning chains, or heterogeneous KG schemas. We propose ROG (Reasoning Over knowledge Graphs with large language models), an ensemble-style framework that combines query-aware KG neighborhood retrieval with large language model (LLM)-based chain-of-thought reasoning. ROG decomposes complex FOL queries into sequences of simpler sub-queries, retrieves compact, query-relevant subgraphs as contextual evidence, and performs step-by-step logical inference using an LLM, avoiding the need for task-specific embedding optimization. Experiments on standard KG reasoning benchmarks demonstrate that ROG consistently outperforms strong embedding-based baselines in terms of mean reciprocal rank (MRR), with particularly notable gains on high-complexity query types. These results suggest that integrating structured KG retrieval with LLM-driven logical reasoning offers a robust and effective alternative for complex KG reasoning tasks.
Skyra: AI-Generated Video Detection via Grounded Artifact Reasoning
Dec 17, 2025The misuse of AI-driven video generation technologies has raised serious social concerns, highlighting the urgent need for reliable AI-generated video detectors. However, most existing methods are limited to binary classification and lack the necessary explanations for human interpretation. In this paper, we present Skyra, a specialized multimodal large language model (MLLM) that identifies human-perceivable visual artifacts in AI-generated videos and leverages them as grounded evidence for both detection and explanation. To support this objective, we construct ViF-CoT-4K for Supervised Fine-Tuning (SFT), which represents the first large-scale AI-generated video artifact dataset with fine-grained human annotations. We then develop a two-stage training strategy that systematically enhances our model's spatio-temporal artifact perception, explanation capability, and detection accuracy. To comprehensively evaluate Skyra, we introduce ViF-Bench, a benchmark comprising 3K high-quality samples generated by over ten state-of-the-art video generators. Extensive experiments demonstrate that Skyra surpasses existing methods across multiple benchmarks, while our evaluation yields valuable insights for advancing explainable AI-generated video detection.
A Multi-Mode Structured Light 3D Imaging System with Multi-Source Information Fusion for Underwater Pipeline Detection
Dec 12, 2025



Underwater pipelines are highly susceptible to corrosion, which not only shorten their service life but also pose significant safety risks. Compared with manual inspection, the intelligent real-time imaging system for underwater pipeline detection has become a more reliable and practical solution. Among various underwater imaging techniques, structured light 3D imaging can restore the sufficient spatial detail for precise defect characterization. Therefore, this paper develops a multi-mode underwater structured light 3D imaging system for pipeline detection (UW-SLD system) based on multi-source information fusion. First, a rapid distortion correction (FDC) method is employed for efficient underwater image rectification. To overcome the challenges of extrinsic calibration among underwater sensors, a factor graph-based parameter optimization method is proposed to estimate the transformation matrix between the structured light and acoustic sensors. Furthermore, a multi-mode 3D imaging strategy is introduced to adapt to the geometric variability of underwater pipelines. Given the presence of numerous disturbances in underwater environments, a multi-source information fusion strategy and an adaptive extended Kalman filter (AEKF) are designed to ensure stable pose estimation and high-accuracy measurements. In particular, an edge detection-based ICP (ED-ICP) algorithm is proposed. This algorithm integrates pipeline edge detection network with enhanced point cloud registration to achieve robust and high-fidelity reconstruction of defect structures even under variable motion conditions. Extensive experiments are conducted under different operation modes, velocities, and depths. The results demonstrate that the developed system achieves superior accuracy, adaptability and robustness, providing a solid foundation for autonomous underwater pipeline detection.
SilverTorch: A Unified Model-based System to Democratize Large-Scale Recommendation on GPUs
Nov 18, 2025Serving deep learning based recommendation models (DLRM) at scale is challenging. Existing systems rely on CPU-based ANN indexing and filtering services, suffering from non-negligible costs and forgoing joint optimization opportunities. Such inefficiency makes them difficult to support more complex model architectures, such as learned similarities and multi-task retrieval. In this paper, we propose SilverTorch, a model-based system for serving recommendation models on GPUs. SilverTorch unifies model serving by replacing standalone indexing and filtering services with layers of served models. We propose a Bloom index algorithm on GPUs for feature filtering and a tensor-native fused Int8 ANN kernel on GPUs for nearest neighbor search. We further co-design the ANN search index and filtering index to reduce GPU memory utilization and eliminate unnecessary computation. Benefit from SilverTorch's serving paradigm, we introduce a OverArch scoring layer and a Value Model to aggregate results across multi-tasks. These advancements improve the accuracy for retrieval and enable future studies for serving more complex models. For ranking, SilverTorch's design accelerates item embedding calculation by caching the pre-calculated embeddings inside the serving model. Our evaluation on the industry-scale datasets show that SilverTorch achieves up to 5.6x lower latency and 23.7x higher throughput compared to the state-of-the-art approaches. We also demonstrate that SilverTorch's solution is 13.35x more cost-efficient than CPU-based solution while improving accuracy via serving more complex models. SilverTorch serves over hundreds of models online across major products and recommends contents for billions of daily active users.
Mitigating Recommendation Biases via Group-Alignment and Global-Uniformity in Representation Learning
Nov 17, 2025Collaborative Filtering~(CF) plays a crucial role in modern recommender systems, leveraging historical user-item interactions to provide personalized suggestions. However, CF-based methods often encounter biases due to imbalances in training data. This phenomenon makes CF-based methods tend to prioritize recommending popular items and performing unsatisfactorily on inactive users. Existing works address this issue by rebalancing training samples, reranking recommendation results, or making the modeling process robust to the bias. Despite their effectiveness, these approaches can compromise accuracy or be sensitive to weighting strategies, making them challenging to train. In this paper, we deeply analyze the causes and effects of the biases and propose a framework to alleviate biases in recommendation from the perspective of representation distribution, namely Group-Alignment and Global-Uniformity Enhanced Representation Learning for Debiasing Recommendation (AURL). Specifically, we identify two significant problems in the representation distribution of users and items, namely group-discrepancy and global-collapse. These two problems directly lead to biases in the recommendation results. To this end, we propose two simple but effective regularizers in the representation space, respectively named group-alignment and global-uniformity. The goal of group-alignment is to bring the representation distribution of long-tail entities closer to that of popular entities, while global-uniformity aims to preserve the information of entities as much as possible by evenly distributing representations. Our method directly optimizes both the group-alignment and global-uniformity regularization terms to mitigate recommendation biases. Extensive experiments on three real datasets and various recommendation backbones verify the superiority of our proposed framework.
DINOv3-Guided Cross Fusion Framework for Semantic-aware CT generation from MRI and CBCT
Nov 15, 2025



Generating synthetic CT images from CBCT or MRI has a potential for efficient radiation dose planning and adaptive radiotherapy. However, existing CNN-based models lack global semantic understanding, while Transformers often overfit small medical datasets due to high model capacity and weak inductive bias. To address these limitations, we propose a DINOv3-Guided Cross Fusion (DGCF) framework that integrates a frozen self-supervised DINOv3 Transformer with a trainable CNN encoder-decoder. It hierarchically fuses global representation of Transformer and local features of CNN via a learnable cross fusion module, achieving balanced local appearance and contextual representation. Furthermore, we introduce a Multi-Level DINOv3 Perceptual (MLDP) loss that encourages semantic similarity between synthetic CT and the ground truth in DINOv3's feature space. Experiments on the SynthRAD2023 pelvic dataset demonstrate that DGCF achieved state-of-the-art performance in terms of MS-SSIM, PSNR and segmentation-based metrics on both MRI$\rightarrow$CT and CBCT$\rightarrow$CT translation tasks. To the best of our knowledge, this is the first work to employ DINOv3 representations for medical image translation, highlighting the potential of self-supervised Transformer guidance for semantic-aware CT synthesis. The code is available at https://github.com/HiLab-git/DGCF.
Every Step Evolves: Scaling Reinforcement Learning for Trillion-Scale Thinking Model
Oct 21, 2025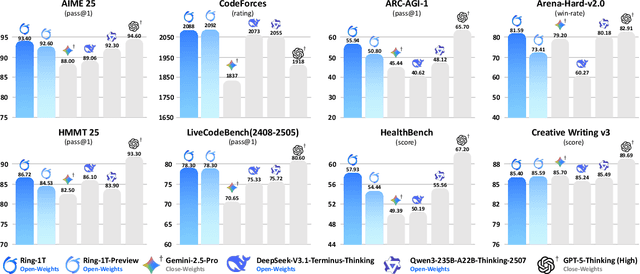
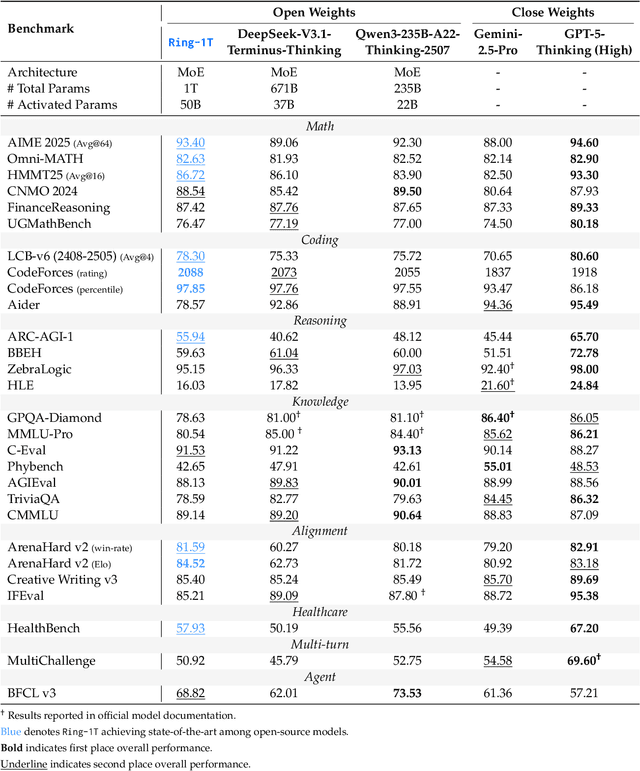
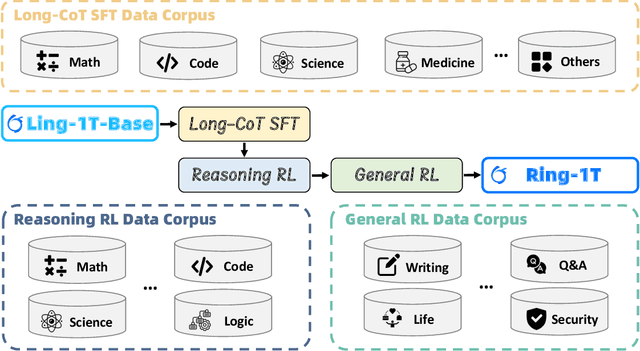
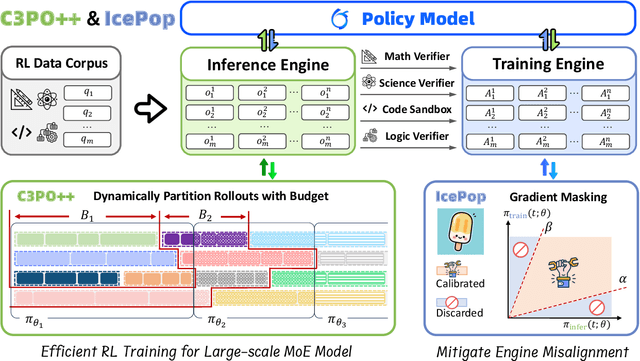
We present Ring-1T, the first open-source, state-of-the-art thinking model with a trillion-scale parameter. It features 1 trillion total parameters and activates approximately 50 billion per token. Training such models at a trillion-parameter scale introduces unprecedented challenges, including train-inference misalignment, inefficiencies in rollout processing, and bottlenecks in the RL system. To address these, we pioneer three interconnected innovations: (1) IcePop stabilizes RL training via token-level discrepancy masking and clipping, resolving instability from training-inference mismatches; (2) C3PO++ improves resource utilization for long rollouts under a token budget by dynamically partitioning them, thereby obtaining high time efficiency; and (3) ASystem, a high-performance RL framework designed to overcome the systemic bottlenecks that impede trillion-parameter model training. Ring-1T delivers breakthrough results across critical benchmarks: 93.4 on AIME-2025, 86.72 on HMMT-2025, 2088 on CodeForces, and 55.94 on ARC-AGI-v1. Notably, it attains a silver medal-level result on the IMO-2025, underscoring its exceptional reasoning capabilities. By releasing the complete 1T parameter MoE model to the community, we provide the research community with direct access to cutting-edge reasoning capabilities. This contribution marks a significant milestone in democratizing large-scale reasoning intelligence and establishes a new baseline for open-source model performance.
KERAG: Knowledge-Enhanced Retrieval-Augmented Generation for Advanced Question Answering
Sep 05, 2025Retrieval-Augmented Generation (RAG) mitigates hallucination in Large Language Models (LLMs) by incorporating external data, with Knowledge Graphs (KGs) offering crucial information for question answering. Traditional Knowledge Graph Question Answering (KGQA) methods rely on semantic parsing, which typically retrieves knowledge strictly necessary for answer generation, thus often suffer from low coverage due to rigid schema requirements and semantic ambiguity. We present KERAG, a novel KG-based RAG pipeline that enhances QA coverage by retrieving a broader subgraph likely to contain relevant information. Our retrieval-filtering-summarization approach, combined with fine-tuned LLMs for Chain-of-Thought reasoning on knowledge sub-graphs, reduces noises and improves QA for both simple and complex questions. Experiments demonstrate that KERAG surpasses state-of-the-art solutions by about 7% in quality and exceeds GPT-4o (Tool) by 10-21%.
UItron: Foundational GUI Agent with Advanced Perception and Planning
Aug 29, 2025GUI agent aims to enable automated operations on Mobile/PC devices, which is an important task toward achieving artificial general intelligence. The rapid advancement of VLMs accelerates the development of GUI agents, owing to their powerful capabilities in visual understanding and task planning. However, building a GUI agent remains a challenging task due to the scarcity of operation trajectories, the availability of interactive infrastructure, and the limitation of initial capabilities in foundation models. In this work, we introduce UItron, an open-source foundational model for automatic GUI agents, featuring advanced GUI perception, grounding, and planning capabilities. UItron highlights the necessity of systemic data engineering and interactive infrastructure as foundational components for advancing GUI agent development. It not only systematically studies a series of data engineering strategies to enhance training effects, but also establishes an interactive environment connecting both Mobile and PC devices. In training, UItron adopts supervised finetuning over perception and planning tasks in various GUI scenarios, and then develop a curriculum reinforcement learning framework to enable complex reasoning and exploration for online environments. As a result, UItron achieves superior performance in benchmarks of GUI perception, grounding, and planning. In particular, UItron highlights the interaction proficiency with top-tier Chinese mobile APPs, as we identified a general lack of Chinese capabilities even in state-of-the-art solutions. To this end, we manually collect over one million steps of operation trajectories across the top 100 most popular apps, and build the offline and online agent evaluation environments. Experimental results demonstrate that UItron achieves significant progress in Chinese app scenarios, propelling GUI agents one step closer to real-world application.