 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDecomposing Complex Queries for Tip-of-the-tongue Retrieval
May 24, 2023



When re-finding items, users who forget or are uncertain about identifying details often rely on creative strategies for expressing their information needs -- complex queries that describe content elements (e.g., book characters or events), information beyond the document text (e.g., descriptions of book covers), or personal context (e.g., when they read a book). This retrieval setting, called tip of the tongue (TOT), is especially challenging for models heavily reliant on lexical and semantic overlap between query and document text. In this work, we introduce a simple yet effective framework for handling such complex queries by decomposing the query into individual clues, routing those as sub-queries to specialized retrievers, and ensembling the results. This approach allows us to take advantage of off-the-shelf retrievers (e.g., CLIP for retrieving images of book covers) or incorporate retriever-specific logic (e.g., date constraints). We show that our framework incorportating query decompositions into retrievers can improve gold book recall up to 7% relative again for Recall@5 on a new collection of 14,441 real-world query-book pairs from an online community for resolving TOT inquiries.
Gorilla: Large Language Model Connected with Massive APIs
May 24, 2023



Large Language Models (LLMs) have seen an impressive wave of advances recently, with models now excelling in a variety of tasks, such as mathematical reasoning and program synthesis. However, their potential to effectively use tools via API calls remains unfulfilled. This is a challenging task even for today's state-of-the-art LLMs such as GPT-4, largely due to their inability to generate accurate input arguments and their tendency to hallucinate the wrong usage of an API call. We release Gorilla, a finetuned LLaMA-based model that surpasses the performance of GPT-4 on writing API calls. When combined with a document retriever, Gorilla demonstrates a strong capability to adapt to test-time document changes, enabling flexible user updates or version changes. It also substantially mitigates the issue of hallucination, commonly encountered when prompting LLMs directly. To evaluate the model's ability, we introduce APIBench, a comprehensive dataset consisting of HuggingFace, TorchHub, and TensorHub APIs. The successful integration of the retrieval system with Gorilla demonstrates the potential for LLMs to use tools more accurately, keep up with frequently updated documentation, and consequently increase the reliability and applicability of their outputs. Gorilla's code, model, data, and demo are available at https://gorilla.cs.berkeley.edu
Simple Token-Level Confidence Improves Caption Correctness
May 11, 2023



The ability to judge whether a caption correctly describes an image is a critical part of vision-language understanding. However, state-of-the-art models often misinterpret the correctness of fine-grained details, leading to errors in outputs such as hallucinating objects in generated captions or poor compositional reasoning. In this work, we explore Token-Level Confidence, or TLC, as a simple yet surprisingly effective method to assess caption correctness. Specifically, we fine-tune a vision-language model on image captioning, input an image and proposed caption to the model, and aggregate either algebraic or learned token confidences over words or sequences to estimate image-caption consistency. Compared to sequence-level scores from pretrained models, TLC with algebraic confidence measures achieves a relative improvement in accuracy by 10% on verb understanding in SVO-Probes and outperforms prior state-of-the-art in image and group scores for compositional reasoning in Winoground by a relative 37% and 9%, respectively. When training data are available, a learned confidence estimator provides further improved performance, reducing object hallucination rates in MS COCO Captions by a relative 30% over the original model and setting a new state-of-the-art.
High-throughput Generative Inference of Large Language Models with a Single GPU
Mar 13, 2023



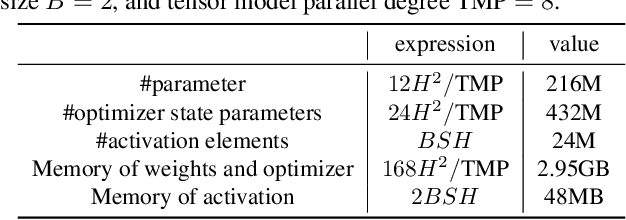
The high computational and memory requirements of large language model (LLM) inference traditionally make it feasible only with multiple high-end accelerators. Motivated by the emerging demand for latency-insensitive tasks with batched processing, this paper initiates the study of high-throughput LLM inference using limited resources, such as a single commodity GPU. We present FlexGen, a high-throughput generation engine for running LLMs with limited GPU memory. FlexGen can be flexibly configured under various hardware resource constraints by aggregating memory and computation from the GPU, CPU, and disk. Through a linear programming optimizer, it searches for efficient patterns to store and access tensors. FlexGen further compresses these weights and the attention cache to 4 bits with negligible accuracy loss. These techniques enable FlexGen to have a larger space of batch size choices and thus significantly increase maximum throughput. As a result, when running OPT-175B on a single 16GB GPU, FlexGen achieves significantly higher throughput compared to state-of-the-art offloading systems, reaching a generation throughput of 1 token/s for the first time with an effective batch size of 144. On the HELM benchmark, FlexGen can benchmark a 30B model with a 16GB GPU on 7 representative sub-scenarios in 21 hours. The code is available at https://github.com/FMInference/FlexGen
AlpaServe: Statistical Multiplexing with Model Parallelism for Deep Learning Serving
Feb 22, 2023Model parallelism is conventionally viewed as a method to scale a single large deep learning model beyond the memory limits of a single device. In this paper, we demonstrate that model parallelism can be additionally used for the statistical multiplexing of multiple devices when serving multiple models, even when a single model can fit into a single device. Our work reveals a fundamental trade-off between the overhead introduced by model parallelism and the opportunity to exploit statistical multiplexing to reduce serving latency in the presence of bursty workloads. We explore the new trade-off space and present a novel serving system, AlpaServe, that determines an efficient strategy for placing and parallelizing collections of large deep learning models across a distributed cluster. Evaluation results on production workloads show that AlpaServe can process requests at up to 10x higher rates or 6x more burstiness while staying within latency constraints for more than 99% of requests.
The Wisdom of Hindsight Makes Language Models Better Instruction Followers
Feb 10, 2023



Reinforcement learning has seen wide success in finetuning large language models to better align with instructions via human feedback. The so-called algorithm, Reinforcement Learning with Human Feedback (RLHF) demonstrates impressive performance on the GPT series models. However, the underlying Reinforcement Learning (RL) algorithm is complex and requires an additional training pipeline for reward and value networks. In this paper, we consider an alternative approach: converting feedback to instruction by relabeling the original one and training the model for better alignment in a supervised manner. Such an algorithm doesn't require any additional parameters except for the original language model and maximally reuses the pretraining pipeline. To achieve this, we formulate instruction alignment problem for language models as a goal-reaching problem in decision making. We propose Hindsight Instruction Relabeling (HIR), a novel algorithm for aligning language models with instructions. The resulting two-stage algorithm shed light to a family of reward-free approaches that utilize the hindsightly relabeled instructions based on feedback. We evaluate the performance of HIR extensively on 12 challenging BigBench reasoning tasks and show that HIR outperforms the baseline algorithms and is comparable to or even surpasses supervised finetuning.
Multitask Vision-Language Prompt Tuning
Dec 05, 2022



Prompt Tuning, conditioning on task-specific learned prompt vectors, has emerged as a data-efficient and parameter-efficient method for adapting large pretrained vision-language models to multiple downstream tasks. However, existing approaches usually consider learning prompt vectors for each task independently from scratch, thereby failing to exploit the rich shareable knowledge across different vision-language tasks. In this paper, we propose multitask vision-language prompt tuning (MVLPT), which incorporates cross-task knowledge into prompt tuning for vision-language models. Specifically, (i) we demonstrate the effectiveness of learning a single transferable prompt from multiple source tasks to initialize the prompt for each target task; (ii) we show many target tasks can benefit each other from sharing prompt vectors and thus can be jointly learned via multitask prompt tuning. We benchmark the proposed MVLPT using three representative prompt tuning methods, namely text prompt tuning, visual prompt tuning, and the unified vision-language prompt tuning. Results in 20 vision tasks demonstrate that the proposed approach outperforms all single-task baseline prompt tuning methods, setting the new state-of-the-art on the few-shot ELEVATER benchmarks and cross-task generalization benchmarks. To understand where the cross-task knowledge is most effective, we also conduct a large-scale study on task transferability with 20 vision tasks in 400 combinations for each prompt tuning method. It shows that the most performant MVLPT for each prompt tuning method prefers different task combinations and many tasks can benefit each other, depending on their visual similarity and label similarity. Code is available at https://github.com/sIncerass/MVLPT.
TEMPERA: Test-Time Prompting via Reinforcement Learning
Nov 21, 2022



Careful prompt design is critical to the use of large language models in zero-shot or few-shot learning. As a consequence, there is a growing interest in automated methods to design optimal prompts. In this work, we propose Test-time Prompt Editing using Reinforcement learning (TEMPERA). In contrast to prior prompt generation methods, TEMPERA can efficiently leverage prior knowledge, is adaptive to different queries and provides an interpretable prompt for every query. To achieve this, we design a novel action space that allows flexible editing of the initial prompts covering a wide set of commonly-used components like instructions, few-shot exemplars, and verbalizers. The proposed method achieves significant gains compared with recent SoTA approaches like prompt tuning, AutoPrompt, and RLPrompt, across a variety of tasks including sentiment analysis, topic classification, natural language inference, and reading comprehension. Our method achieves 5.33x on average improvement in sample efficiency when compared to the traditional fine-tuning methods.
On Optimizing the Communication of Model Parallelism
Nov 10, 2022
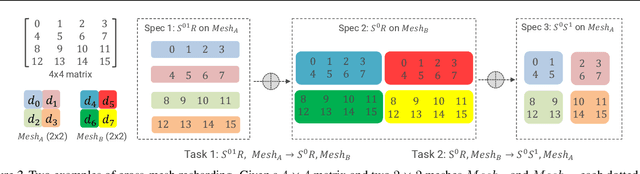
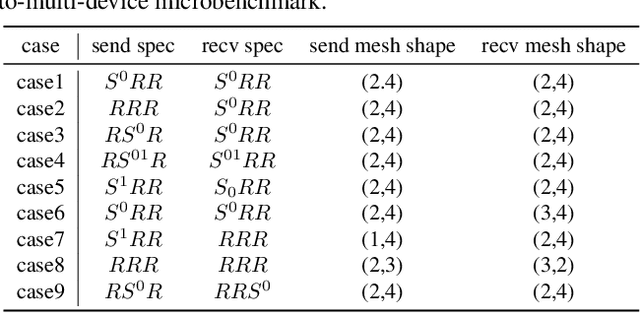
We study a novel and important communication pattern in large-scale model-parallel deep learning (DL), which we call cross-mesh resharding. This pattern emerges when the two paradigms of model parallelism - intra-operator and inter-operator parallelism - are combined to support large models on large clusters. In cross-mesh resharding, a sharded tensor needs to be sent from a source device mesh to a destination device mesh, on which the tensor may be distributed with the same or different layouts. We formalize this as a many-to-many multicast communication problem, and show that existing approaches either are sub-optimal or do not generalize to different network topologies or tensor layouts, which result from different model architectures and parallelism strategies. We then propose two contributions to address cross-mesh resharding: an efficient broadcast-based communication system, and an "overlapping-friendly" pipeline schedule. On microbenchmarks, our overall system outperforms existing ones by up to 10x across various tensor and mesh layouts. On end-to-end training of two large models, GPT-3 and U-Transformer, we improve throughput by 10% and 50%, respectively.
Using Language to Extend to Unseen Domains
Oct 20, 2022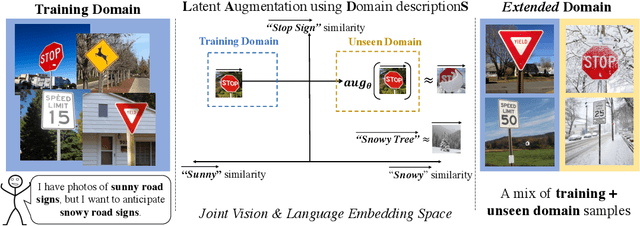
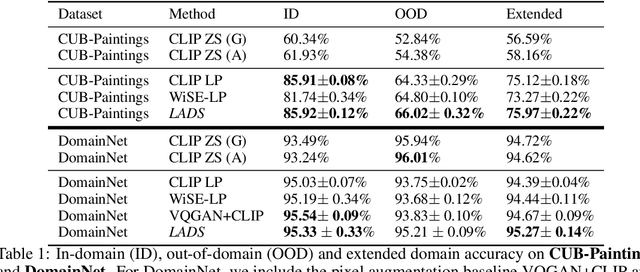
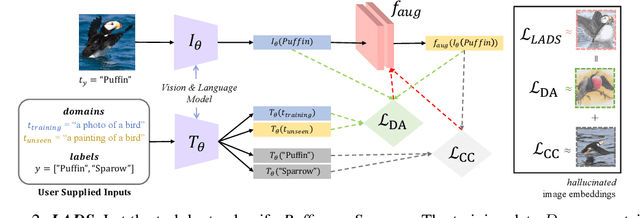

It is expensive to collect training data for every possible domain that a vision model may encounter when deployed. We instead consider how simply verbalizing the training domain (e.g. "photos of birds") as well as domains we want to extend to but do not have data for (e.g. "paintings of birds") can improve robustness. Using a multimodal model with a joint image and language embedding space, our method LADS learns a transformation of the image embeddings from the training domain to each unseen test domain, while preserving task relevant information. Without using any images from the unseen test domain, we show that over the extended domain containing both training and unseen test domains, LADS outperforms standard fine-tuning and ensemble approaches over a suite of four benchmarks targeting domain adaptation and dataset bias