 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMotivations and Preliminary Design for Mid-Air Deployment of a Science Rotorcraft on Mars
Oct 13, 2020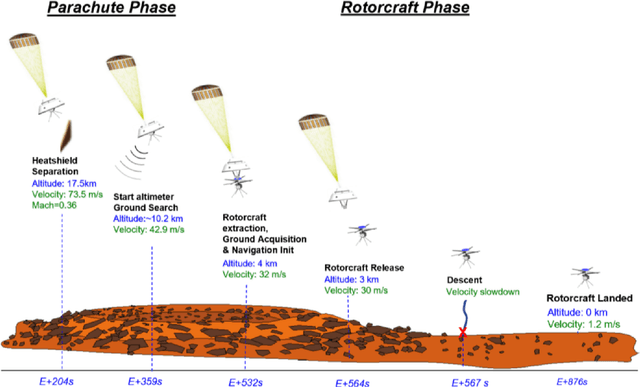
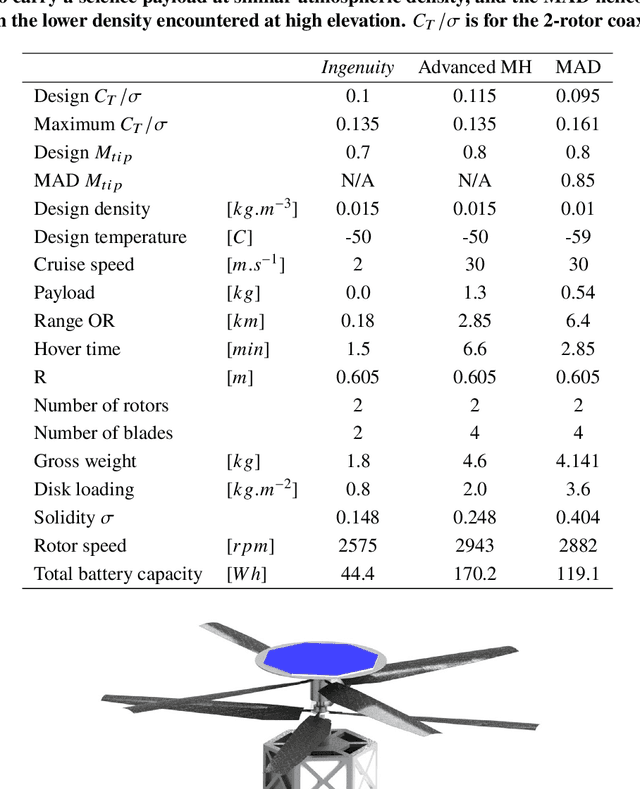
Mid-Air Deployment (MAD) of a rotorcraft during Entry, Descent and Landing (EDL) on Mars eliminates the need to carry a propulsion or airbag landing system. This reduces the total mass inside the aeroshell by more than 100 kg and simplifies the aeroshell architecture. MAD's lighter and simpler design is likely to bring the risk and cost associated with the mission down. Moreover, the lighter entry mass enables landing in the Martian highlands, at elevations inaccessible to current EDL technologies. This paper proposes a novel MAD concept for a Mars helicopter. We suggest a minimum science payload package to perform relevant science in the highlands. A variant of the Ingenuity helicopter is proposed to provide increased deceleration during MAD, and enough lift to fly the science payload in the highlands. We show in simulation that the lighter aeroshell results in a lower terminal velocity (30 m/s) at the end of the parachute phase of the EDL, and at higher altitudes than other approaches. After discussing the aerodynamics, controls, guidance, and mechanical challenges associated with deploying at such speed, we propose a backshell architecture that addresses them to release the helicopter in the safest conditions. Finally, we implemented the helicopter model and aerodynamic descent perturbations in the JPL Dynamics and Real-Time Simulation (DARTS)framework. Preliminary performance evaluation indicates landing and helicopter operation scan be achieved up to 5 km MOLA (Mars Orbiter Laser Altimeter reference).
A Unified NMPC Scheme for MAVs Navigation with 3D Collision Avoidance under Position Uncertainty
Jul 31, 2020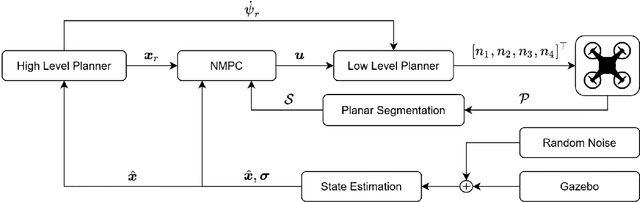
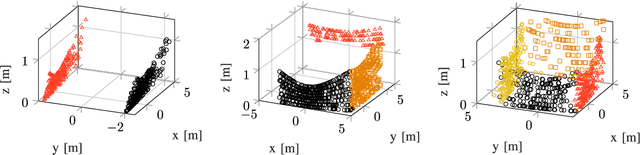
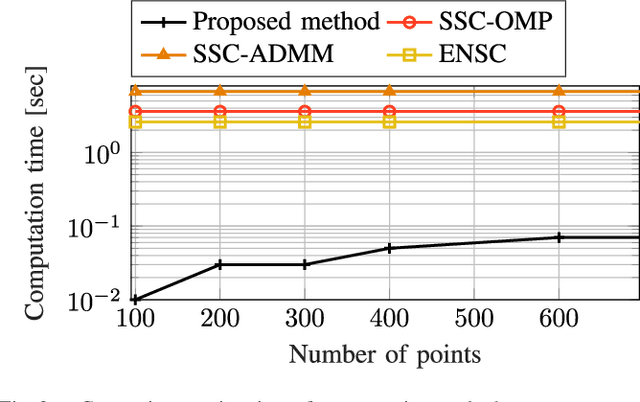
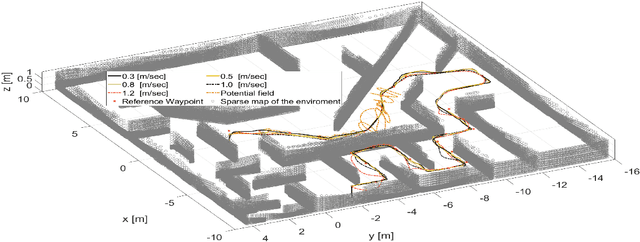
This article proposes a novel Nonlinear Model Predictive Control (NMPC) framework for Micro Aerial Vehicle (MAV) autonomous navigation in constrained environments. The introduced framework allows us to consider the nonlinear dynamics of MAVs and guarantees real-time performance. Our first contribution is to design a computationally efficient subspace clustering method to reveal from geometrical constraints to underlying constraint planes within a 3D point cloud, obtained from a 3D lidar scanner. The second contribution of our work is to incorporate the extracted information into the nonlinear constraints of NMPC for avoiding collisions. Our third contribution focuses on making the controller robust by considering the uncertainty of localization and NMPC using the Shannon entropy. This step enables us to track either the position or velocity references, or none of them if necessary. As a result, the collision avoidance constraints are defined in the local coordinates of MAVs and it remains active and guarantees collision avoidance, despite localization uncertainties, e.g., position estimation drifts. Additionally, as the platform continues the mission, this will result in less uncertain position estimations, due to the feature extraction and loop closure. The efficacy of the suggested framework has been evaluated using various simulations in the Gazebo environment.
Unsupervised Learning for Subterranean Junction Recognition Based on 2D Point Cloud
Jun 07, 2020
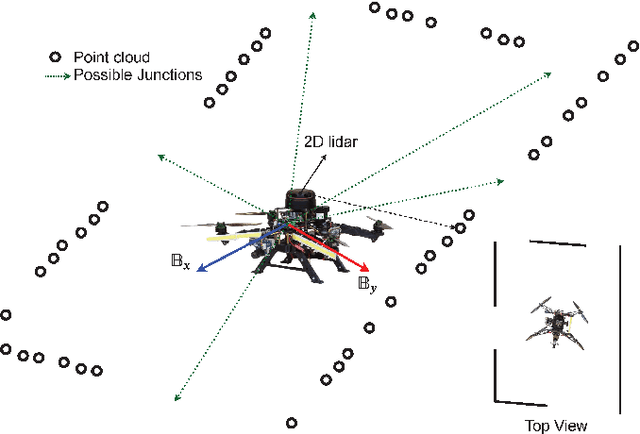
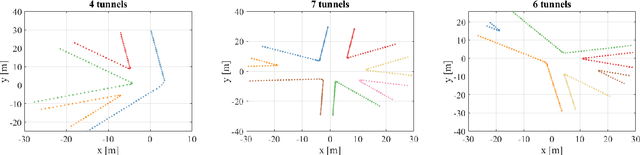

This article proposes a novel unsupervised learning framework for detecting the number of tunnel junctions in subterranean environments based on acquired 2D point clouds. The implementation of the framework provides valuable information for high level mission planners to navigate an aerial platform in unknown areas or robot homing missions. The framework utilizes spectral clustering, which is capable of uncovering hidden structures from connected data points lying on non-linear manifolds. The spectral clustering algorithm computes a spectral embedding of the original 2D point cloud by utilizing the eigen decomposition of a matrix that is derived from the pairwise similarities of these points. We validate the developed framework using multiple data-sets, collected from multiple realistic simulations, as well as from real flights in underground environments, demonstrating the performance and merits of the proposed methodology.
The Kinematics of Tracked Vehicles via the Power Dissipation Method
Apr 10, 2020
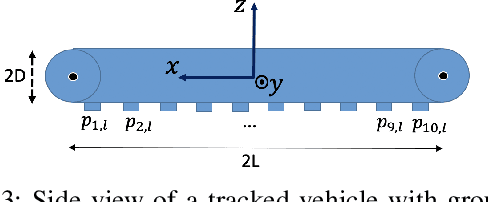
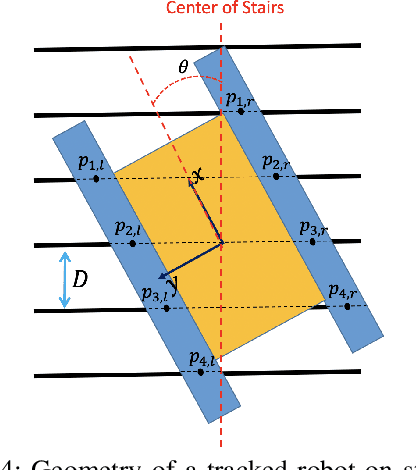
This paper develops a new quasi-static modeling framework for tracked robots based on the power dissipation method. Given a set of track speeds, this method predicts the vehicle's instantaneous rigid body motion. We introduce three specific models: a model for tracked operation on flat ground, a model for vehicle motion when the track's grouser tips touch the ground, and a model for operation on stairs. Experiments show that these models predict tracked vehicle motion more accurately than existing kinematic models, and predict phenomena which are not captured by other models. These novel models provide a basis for new feedback control approaches.
Design and Autonomous Stabilization of a Ballistically Launched Multirotor
Nov 22, 2019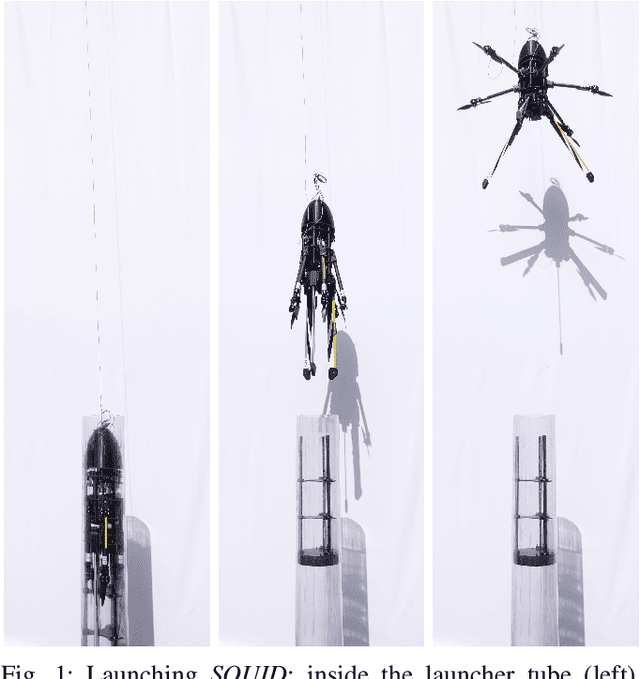
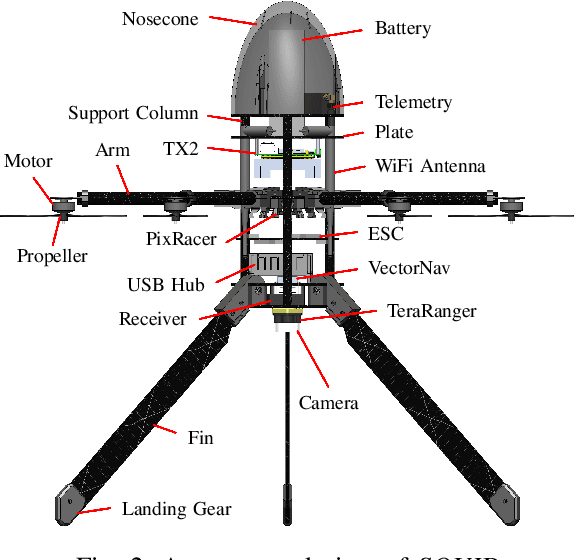
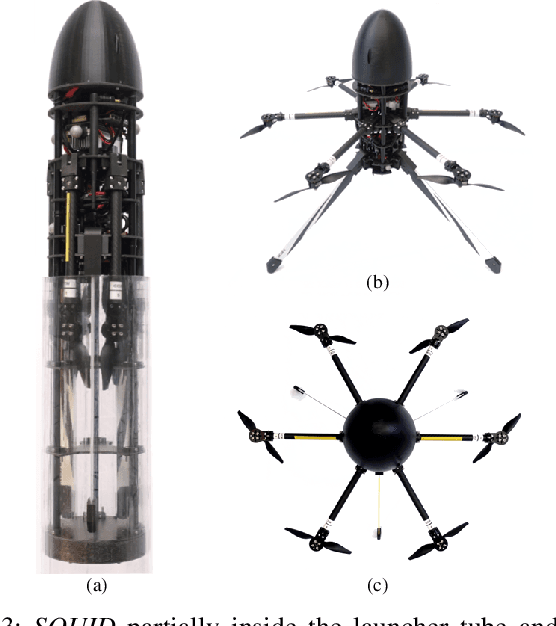
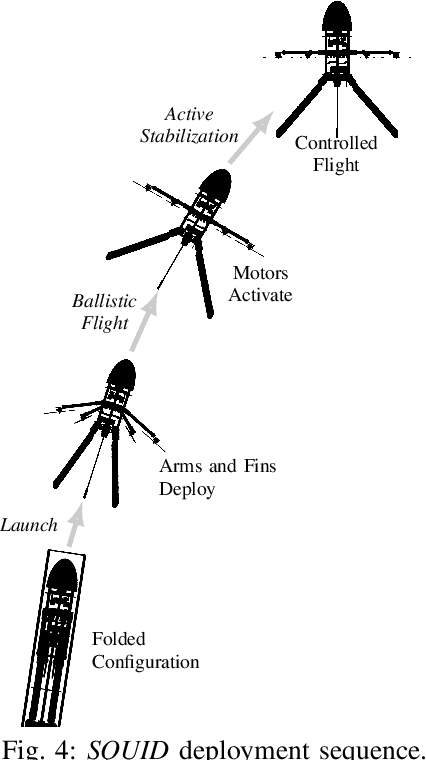
Aircraft that can launch ballistically and then convert to autonomous, free flying drones have applications in many areas, such as emergency response, defense, and space exploration, where they can gather critical situational data using onboard sensors. In previous work, we presented a proof of concept, manually stabilized folding multirotor that deploys from a pressurized tube mounted on a vehicle moving at speeds of up to 50 mph. This paper presents a larger, autonomously stabilizing multirotor prototype with an onboard sensor suite, autonomy pipeline, and improved aerodynamic stability margin. We also demonstrate autonomous transition from passive to active stabilization, confirming the ability of the multirotor to autonomously stabilize after a ballistic launch in a GPS denied environment.
Preference-Based Learning for Exoskeleton Gait Optimization
Sep 26, 2019

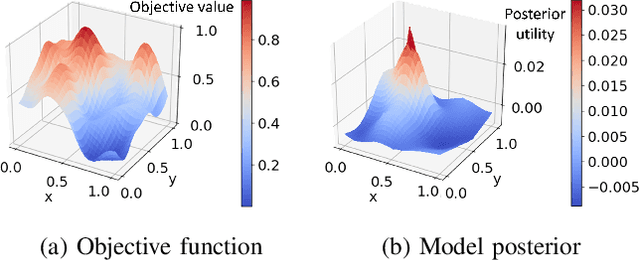
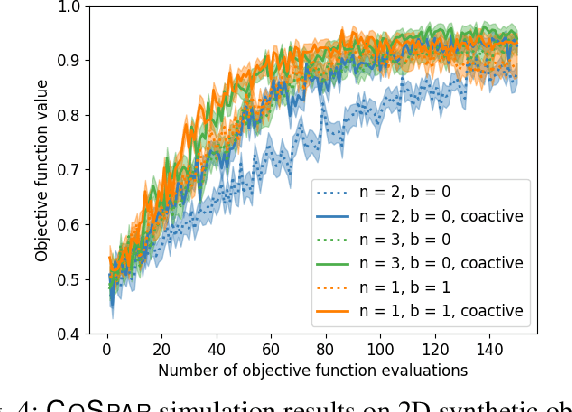
This paper presents a personalized gait optimization framework for lower-body exoskeletons. Rather than optimizing numerical objectives such as the mechanical cost of transport, our approach directly learns from user preferences, e.g., for comfort. Building upon work in preference-based interactive learning, we present the CoSpar algorithm. CoSpar prompts the user to give pairwise preferences between trials and suggest improvements; as exoskeleton walking is a non-intuitive behavior, users can provide preferences more easily and reliably than numerical feedback. We show that CoSpar performs competitively in simulation and demonstrate a prototype implementation of CoSpar on a lower-body exoskeleton to optimize human walking trajectory features. In the experiments, CoSpar consistently found user-preferred parameters of the exoskeleton's walking gait, which suggests that it is a promising starting point for adapting and personalizing exoskeletons (or other assistive devices) to individual users.
Parallelizing Exploration-Exploitation Tradeoffs with Gaussian Process Bandit Optimization
Jun 27, 2012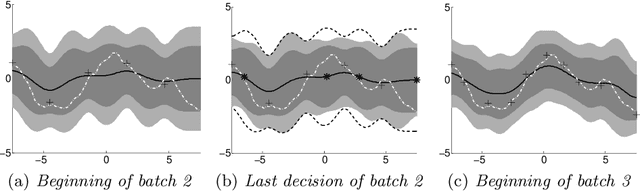
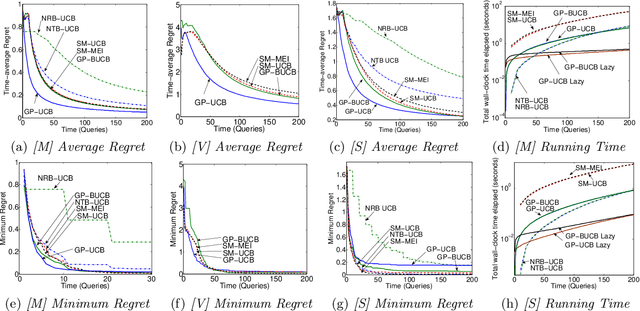
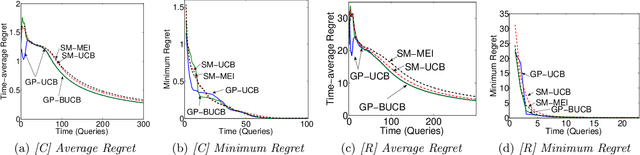
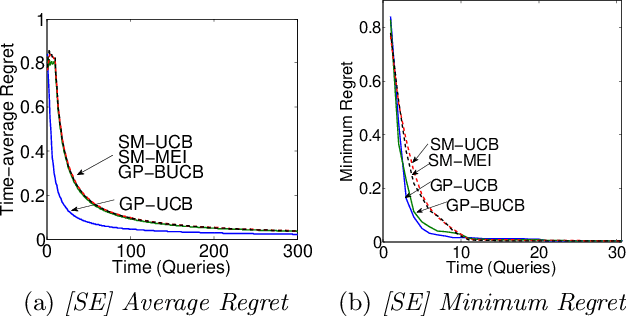
Can one parallelize complex exploration exploitation tradeoffs? As an example, consider the problem of optimal high-throughput experimental design, where we wish to sequentially design batches of experiments in order to simultaneously learn a surrogate function mapping stimulus to response and identify the maximum of the function. We formalize the task as a multi-armed bandit problem, where the unknown payoff function is sampled from a Gaussian process (GP), and instead of a single arm, in each round we pull a batch of several arms in parallel. We develop GP-BUCB, a principled algorithm for choosing batches, based on the GP-UCB algorithm for sequential GP optimization. We prove a surprising result; as compared to the sequential approach, the cumulative regret of the parallel algorithm only increases by a constant factor independent of the batch size B. Our results provide rigorous theoretical support for exploiting parallelism in Bayesian global optimization. We demonstrate the effectiveness of our approach on two real-world applications.