 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAn Addendum to NeBula: Towards Extending TEAM CoSTAR's Solution to Larger Scale Environments
Apr 18, 2025This paper presents an appendix to the original NeBula autonomy solution developed by the TEAM CoSTAR (Collaborative SubTerranean Autonomous Robots), participating in the DARPA Subterranean Challenge. Specifically, this paper presents extensions to NeBula's hardware, software, and algorithmic components that focus on increasing the range and scale of the exploration environment. From the algorithmic perspective, we discuss the following extensions to the original NeBula framework: (i) large-scale geometric and semantic environment mapping; (ii) an adaptive positioning system; (iii) probabilistic traversability analysis and local planning; (iv) large-scale POMDP-based global motion planning and exploration behavior; (v) large-scale networking and decentralized reasoning; (vi) communication-aware mission planning; and (vii) multi-modal ground-aerial exploration solutions. We demonstrate the application and deployment of the presented systems and solutions in various large-scale underground environments, including limestone mine exploration scenarios as well as deployment in the DARPA Subterranean challenge.
Granular Gym: High Performance Simulation for Robotic Tasks with Granular Materials
Jun 02, 2023Granular materials are of critical interest to many robotic tasks in planetary science, construction, and manufacturing. However, the dynamics of granular materials are complex and often computationally very expensive to simulate. We propose a set of methodologies and a system for the fast simulation of granular materials on Graphics Processing Units (GPUs), and show that this simulation is fast enough for basic training with Reinforcement Learning algorithms, which currently require many dynamics samples to achieve acceptable performance. Our method models granular material dynamics using implicit timestepping methods for multibody rigid contacts, as well as algorithmic techniques for efficient parallel collision detection between pairs of particles and between particle and arbitrarily shaped rigid bodies, and programming techniques for minimizing warp divergence on Single-Instruction, Multiple-Thread (SIMT) chip architectures. We showcase our simulation system on several environments targeted toward robotic tasks, and release our simulator as an open-source tool.
A Multi-step Dynamics Modeling Framework For Autonomous Driving In Multiple Environments
May 03, 2023Modeling dynamics is often the first step to making a vehicle autonomous. While on-road autonomous vehicles have been extensively studied, off-road vehicles pose many challenging modeling problems. An off-road vehicle encounters highly complex and difficult-to-model terrain/vehicle interactions, as well as having complex vehicle dynamics of its own. These complexities can create challenges for effective high-speed control and planning. In this paper, we introduce a framework for multistep dynamics prediction that explicitly handles the accumulation of modeling error and remains scalable for sampling-based controllers. Our method uses a specially-initialized Long Short-Term Memory (LSTM) over a limited time horizon as the learned component in a hybrid model to predict the dynamics of a 4-person seating all-terrain vehicle (Polaris S4 1000 RZR) in two distinct environments. By only having the LSTM predict over a fixed time horizon, we negate the need for long term stability that is often a challenge when training recurrent neural networks. Our framework is flexible as it only requires odometry information for labels. Through extensive experimentation, we show that our method is able to predict millions of possible trajectories in real-time, with a time horizon of five seconds in challenging off road driving scenarios.
Early Recall, Late Precision: Multi-Robot Semantic Object Mapping under Operational Constraints in Perceptually-Degraded Environments
Jun 21, 2022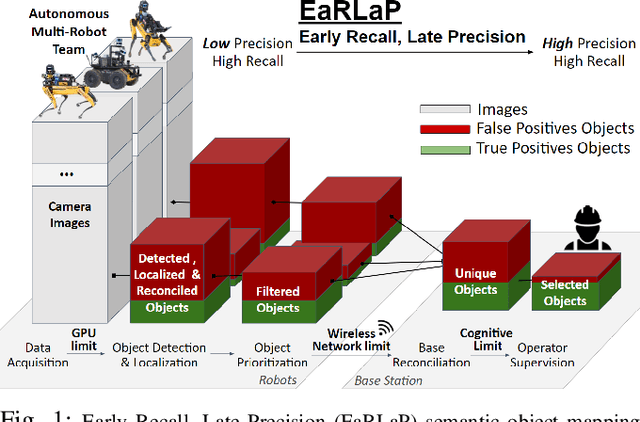
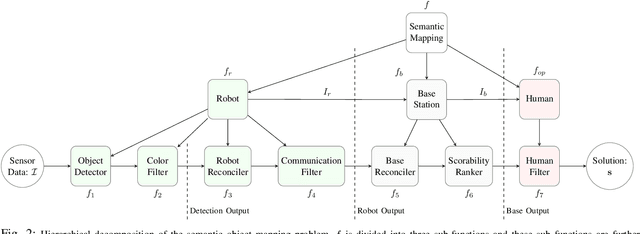
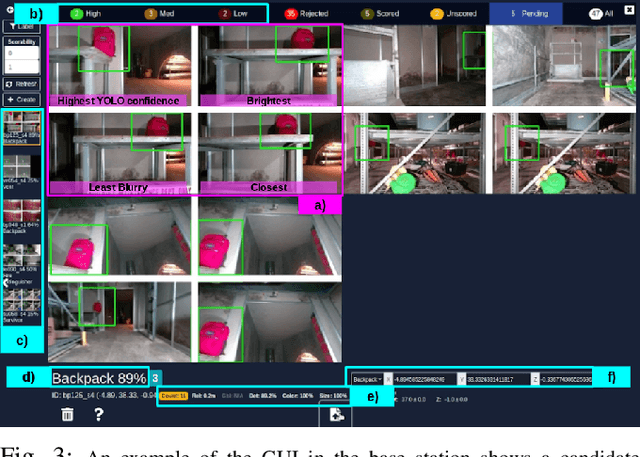
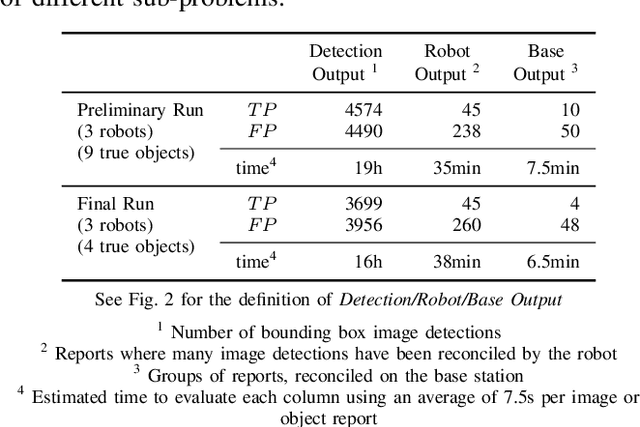
Semantic object mapping in uncertain, perceptually degraded environments during long-range multi-robot autonomous exploration tasks such as search-and-rescue is important and challenging. During such missions, high recall is desirable to avoid missing true target objects and high precision is also critical to avoid wasting valuable operational time on false positives. Given recent advancements in visual perception algorithms, the former is largely solvable autonomously, but the latter is difficult to address without the supervision of a human operator. However, operational constraints such as mission time, computational requirements, mesh network bandwidth and so on, can make the operator's task infeasible unless properly managed. We propose the Early Recall, Late Precision (EaRLaP) semantic object mapping pipeline to solve this problem. EaRLaP was used by Team CoSTAR in DARPA Subterranean Challenge, where it successfully detected all the artifacts encountered by the team of robots. We will discuss these results and performance of the EaRLaP on various datasets.
Design and Autonomous Stabilization of a Ballistically Launched Multirotor
Nov 22, 2019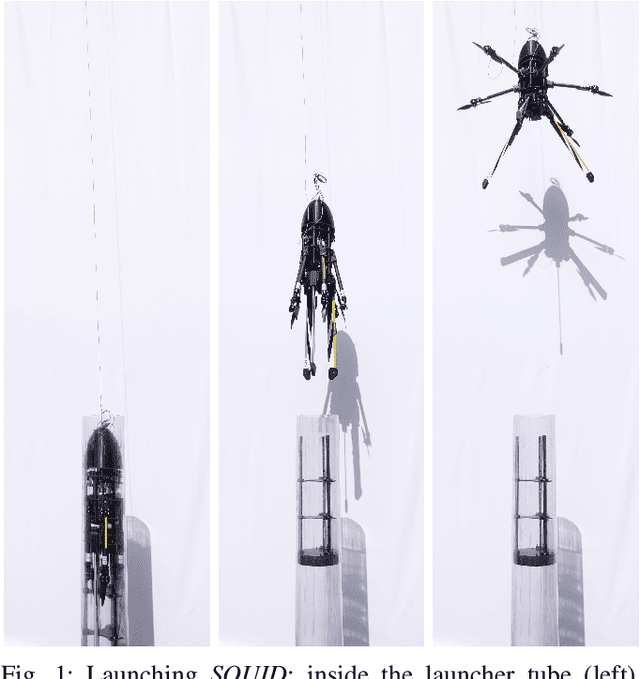
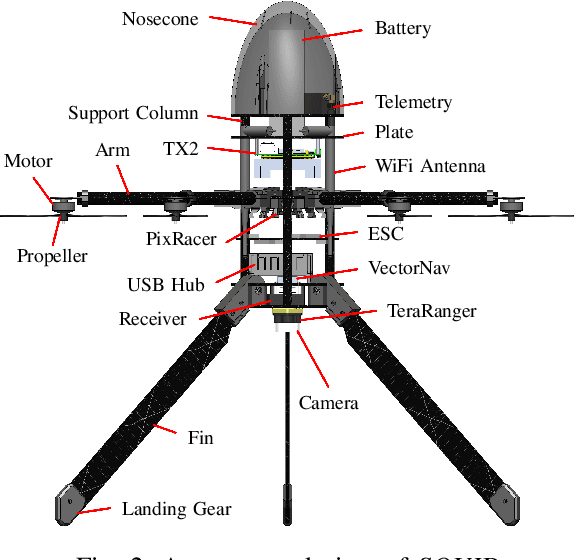
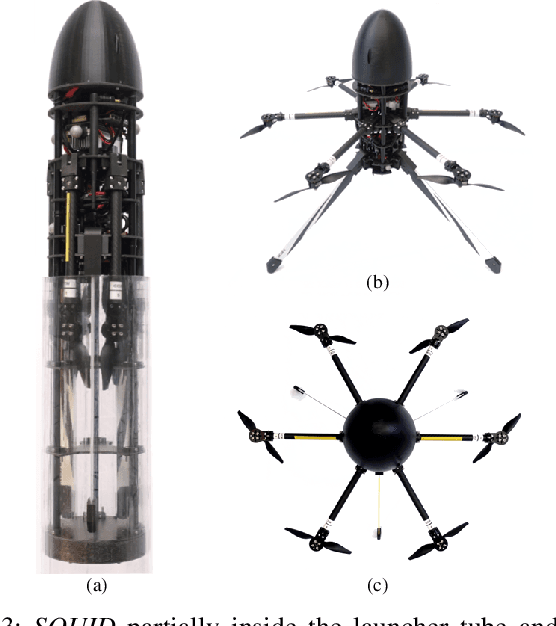
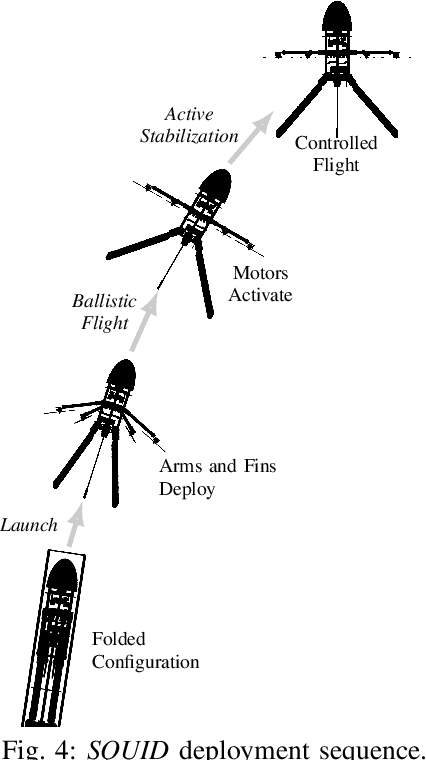
Aircraft that can launch ballistically and then convert to autonomous, free flying drones have applications in many areas, such as emergency response, defense, and space exploration, where they can gather critical situational data using onboard sensors. In previous work, we presented a proof of concept, manually stabilized folding multirotor that deploys from a pressurized tube mounted on a vehicle moving at speeds of up to 50 mph. This paper presents a larger, autonomously stabilizing multirotor prototype with an onboard sensor suite, autonomy pipeline, and improved aerodynamic stability margin. We also demonstrate autonomous transition from passive to active stabilization, confirming the ability of the multirotor to autonomously stabilize after a ballistic launch in a GPS denied environment.