 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMid-Air Helicopter Delivery at Mars Using a Jetpack
Mar 07, 2022
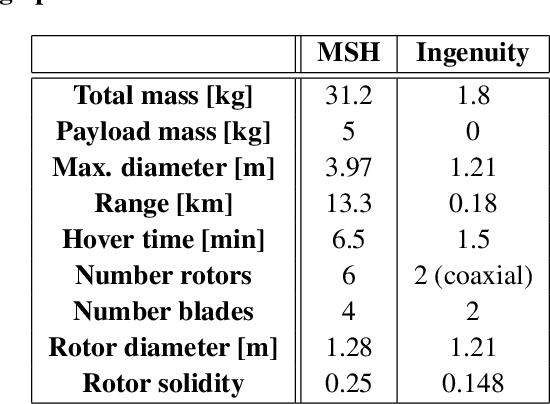
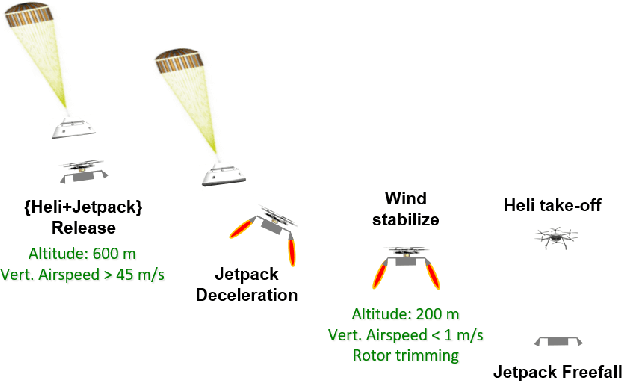
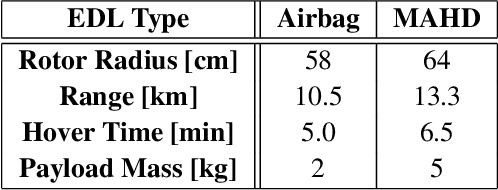
Mid-Air Helicopter Delivery (MAHD) is a new Entry, Descent and Landing (EDL) architecture to enable in situ mobility for Mars science at lower cost than previous missions. It uses a jetpack to slow down a Mars Science Helicopter (MSH) after separation from the backshell, and reach aerodynamic conditions suitable for helicopter take-off in mid air. For given aeroshell dimensions, only MAHD's lander-free approach leaves enough room in the aeroshell to accommodate the largest rotor option for MSH. This drastically improves flight performance, notably allowing +150\% increased science payload mass. Compared to heritage EDL approaches, the simpler MAHD architecture is also likely to reduce cost, and enables access to more hazardous and higher-elevation terrains on Mars. This paper introduces a design for the MAHD system architecture and operations. We present a mechanical configuration that fits both MSH and the jetpack within the 2.65-m Mars heritage aeroshell, and a jetpack control architecture which fully leverages the available helicopter avionics. We discuss preliminary numerical models of the flow dynamics resulting from the interaction between the jets, the rotors and the side winds. We define a force-torque sensing architecture capable of handling the wind and trimming the rotors to prepare for safe take-off. Finally, we analyze the dynamic environment and closed-loop control simulation results to demonstrate the preliminary feasibility of MAHD.
Motivations and Preliminary Design for Mid-Air Deployment of a Science Rotorcraft on Mars
Oct 13, 2020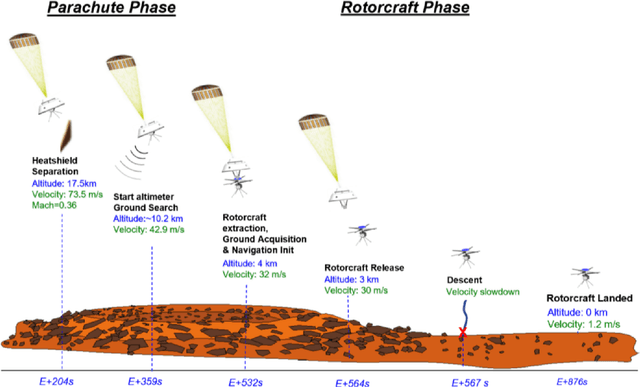
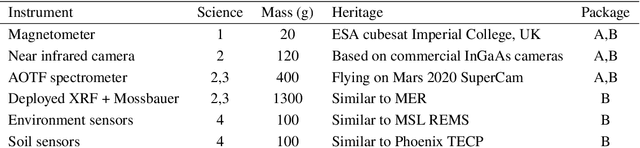
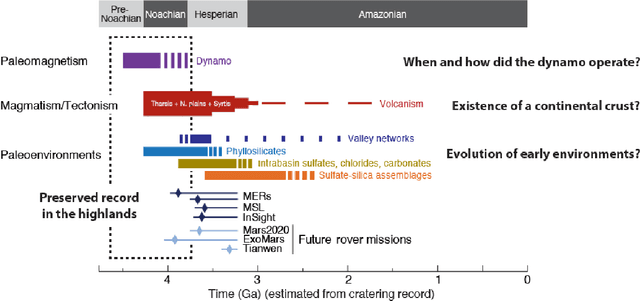
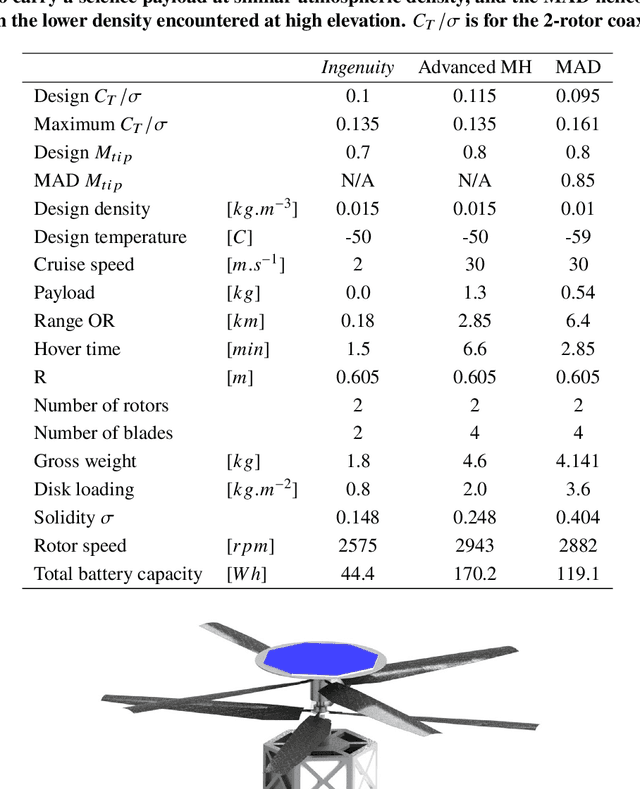
Mid-Air Deployment (MAD) of a rotorcraft during Entry, Descent and Landing (EDL) on Mars eliminates the need to carry a propulsion or airbag landing system. This reduces the total mass inside the aeroshell by more than 100 kg and simplifies the aeroshell architecture. MAD's lighter and simpler design is likely to bring the risk and cost associated with the mission down. Moreover, the lighter entry mass enables landing in the Martian highlands, at elevations inaccessible to current EDL technologies. This paper proposes a novel MAD concept for a Mars helicopter. We suggest a minimum science payload package to perform relevant science in the highlands. A variant of the Ingenuity helicopter is proposed to provide increased deceleration during MAD, and enough lift to fly the science payload in the highlands. We show in simulation that the lighter aeroshell results in a lower terminal velocity (30 m/s) at the end of the parachute phase of the EDL, and at higher altitudes than other approaches. After discussing the aerodynamics, controls, guidance, and mechanical challenges associated with deploying at such speed, we propose a backshell architecture that addresses them to release the helicopter in the safest conditions. Finally, we implemented the helicopter model and aerodynamic descent perturbations in the JPL Dynamics and Real-Time Simulation (DARTS)framework. Preliminary performance evaluation indicates landing and helicopter operation scan be achieved up to 5 km MOLA (Mars Orbiter Laser Altimeter reference).