 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePreserving Relative Localization of FoV-Limited Drone Swarm via Active Mutual Observation
Jul 01, 2024Relative state estimation is crucial for vision-based swarms to estimate and compensate for the unavoidable drift of visual odometry. For autonomous drones equipped with the most compact sensor setting -- a stereo camera that provides a limited field of view (FoV), the demand for mutual observation for relative state estimation conflicts with the demand for environment observation. To balance the two demands for FoV limited swarms by acquiring mutual observations with a safety guarantee, this paper proposes an active localization correction system, which plans camera orientations via a yaw planner during the flight. The yaw planner manages the contradiction by calculating suitable timing and yaw angle commands based on the evaluation of localization uncertainty estimated by the Kalman Filter. Simulation validates the scalability of our algorithm. In real-world experiments, we reduce positioning drift by up to 65% and managed to maintain a given formation in both indoor and outdoor GPS-denied flight, from which the accuracy, efficiency, and robustness of the proposed system are verified.
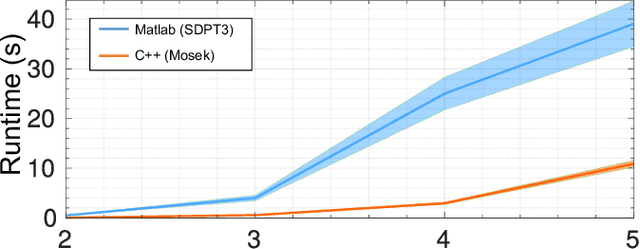
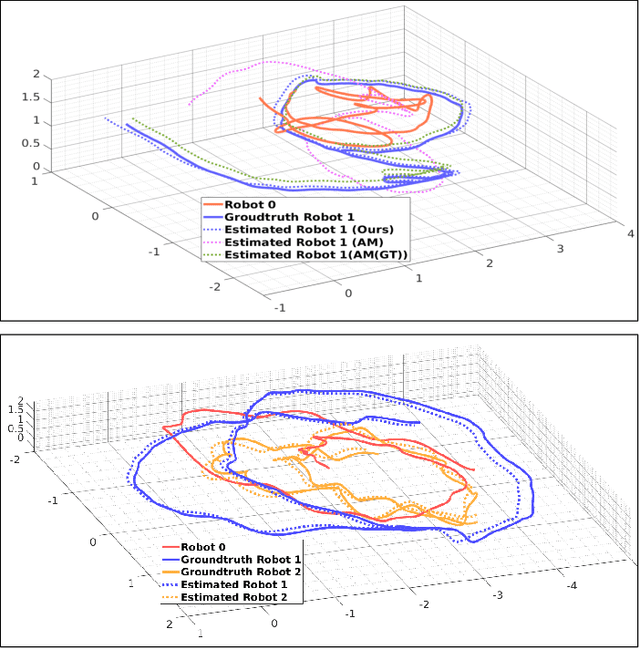
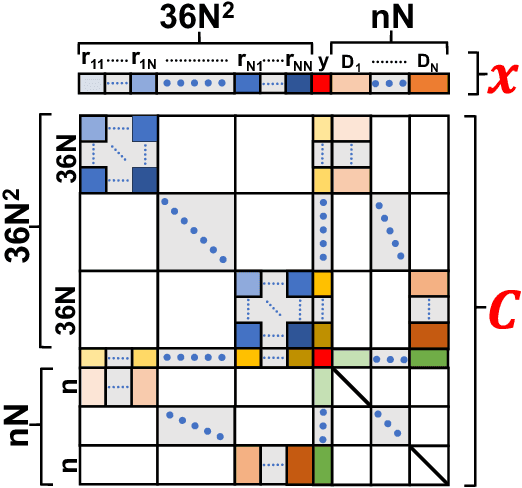
FACT: Fast and Active Coordinate Initialization for Vision-based Drone Swarms
Mar 20, 2024



Swarm robots have sparked remarkable developments across a range of fields. While it is necessary for various applications in swarm robots, a fast and robust coordinate initialization in vision-based drone swarms remains elusive. To this end, our paper proposes a complete system to recover a swarm's initial relative pose on platforms with size, weight, and power (SWaP) constraints. To overcome limited coverage of field-of-view (FoV), the drones rotate in place to obtain observations. To tackle the anonymous measurements, we formulate a non-convex rotation estimation problem and transform it into a semi-definite programming (SDP) problem, which can steadily obtain global optimal values. Then we utilize the Hungarian algorithm to recover relative translation and correspondences between observations and drone identities. To safely acquire complete observations, we actively search for positions and generate feasible trajectories to avoid collisions. To validate the practicability of our system, we conduct experiments on a vision-based drone swarm with only stereo cameras and inertial measurement units (IMUs) as sensors. The results demonstrate that the system can robustly get accurate relative poses in real time with limited onboard computation resources. The source code is released.
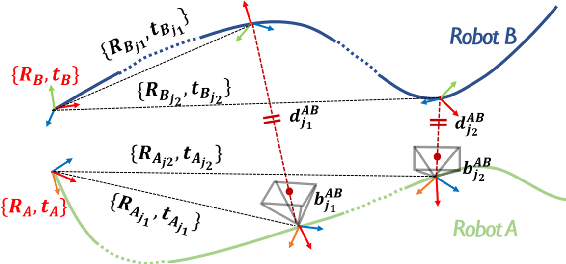
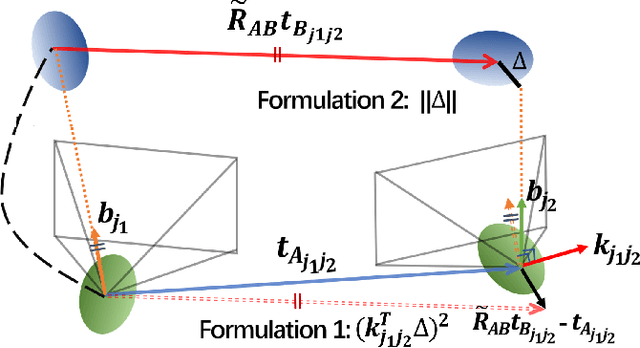
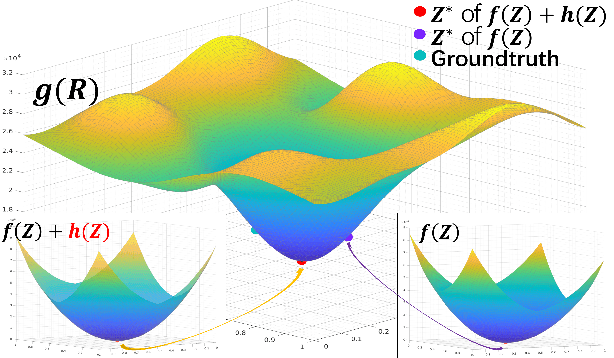
Certifiable Mutual Localization and Trajectory Planning for Bearing-Based Robot Swarm
Jan 15, 2024Bearing measurements,as the most common modality in nature, have recently gained traction in multi-robot systems to enhance mutual localization and swarm collaboration. Despite their advantages, challenges such as sensory noise, obstacle occlusion, and uncoordinated swarm motion persist in real-world scenarios, potentially leading to erroneous state estimation and undermining the system's flexibility, practicality, and robustness.In response to these challenges, in this paper we address theoretical and practical problem related to both mutual localization and swarm planning.Firstly, we propose a certifiable mutual localization algorithm.It features a concise problem formulation coupled with lossless convex relaxation, enabling independence from initial values and globally optimal relative pose recovery.Then, to explore how detection noise and swarm motion influence estimation optimality, we conduct a comprehensive analysis on the interplay between robots' mutual spatial relationship and mutual localization. We develop a differentiable metric correlated with swarm trajectories to explicitly evaluate the noise resistance of optimal estimation.By establishing a finite and pre-computable threshold for this metric and accordingly generating swarm trajectories, the estimation optimality can be strictly guaranteed under arbitrary noise. Based on these findings, an optimization-based swarm planner is proposed to generate safe and smooth trajectories, with consideration of both inter-robot visibility and estimation optimality.Through numerical simulations, we evaluate the optimality and certifiablity of our estimator, and underscore the significance of our planner in enhancing estimation performance.The results exhibit considerable potential of our methods to pave the way for advanced closed-loop intelligence in swarm systems.
Simultaneous Time Synchronization and Mutual Localization for Multi-robot System
Nov 06, 2023



Mutual localization stands as a foundational component within various domains of multi-robot systems. Nevertheless, in relative pose estimation, time synchronization is usually underappreciated and rarely addressed, although it significantly influences estimation accuracy. In this paper, we introduce time synchronization into mutual localization to recover the time offset and relative poses between robots simultaneously. Under a constant velocity assumption in a short time, we fuse time offset estimation with our previous bearing-based mutual localization by a novel error representation. Based on the error model, we formulate a joint optimization problem and utilize semi-definite relaxation (SDR) to furnish a lossless relaxation. By solving the relaxed problem, time synchronization and relative pose estimation can be achieved when time drift between robots is limited. To enhance the application range of time offset estimation, we further propose an iterative method to recover the time offset from coarse to fine. Comparisons between the proposed method and the existing ones through extensive simulation tests present prominent benefits of time synchronization on mutual localization. Moreover, real-world experiments are conducted to show the practicality and robustness.
Bearing-based Relative Localization for Robotic Swarm with Partially Mutual Observations
Oct 15, 2022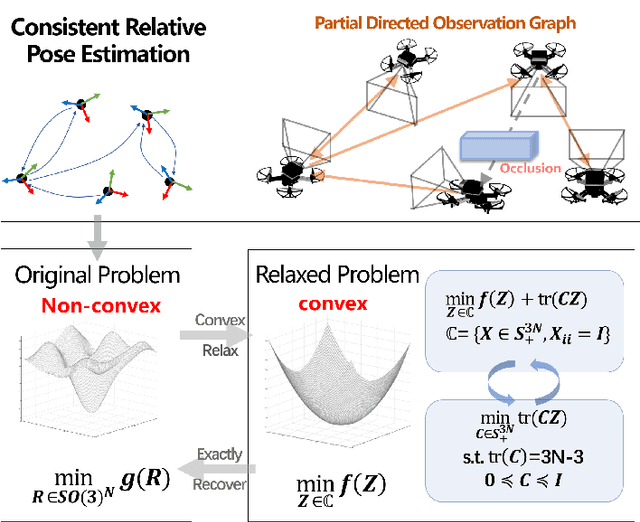
Mutual localization provides a consensus of reference frame as an essential basis for cooperation in multirobot systems. Previous works have developed certifiable and robust solvers for relative transformation estimation between each pair of robots. However, recovering relative poses for robotic swarm with partially mutual observations is still an unexploited problem. In this paper, we present a complete algorithm for it with optimality, scalability and robustness. Firstly, we fuse all odometry and bearing measurements in a unified minimization problem among the Stiefel manifold. Furthermore, we relax the original non-convex problem into a semi-definite programming (SDP) problem with a strict tightness guarantee. Then, to hold the exactness in noised cases, we add a convex (linear) rank cost and apply a convex iteration algorithm. We compare our approach with local optimization methods on extensive simulations with different robot amounts under various noise levels to show our global optimality and scalability advantage. Finally, we conduct real-world experiments to show the practicality and robustness.
Fast localization and single-pixel imaging of the moving object using time-division multiplexing
Aug 15, 2022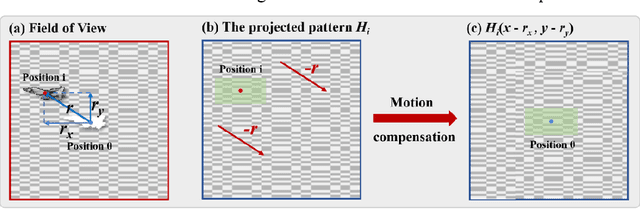
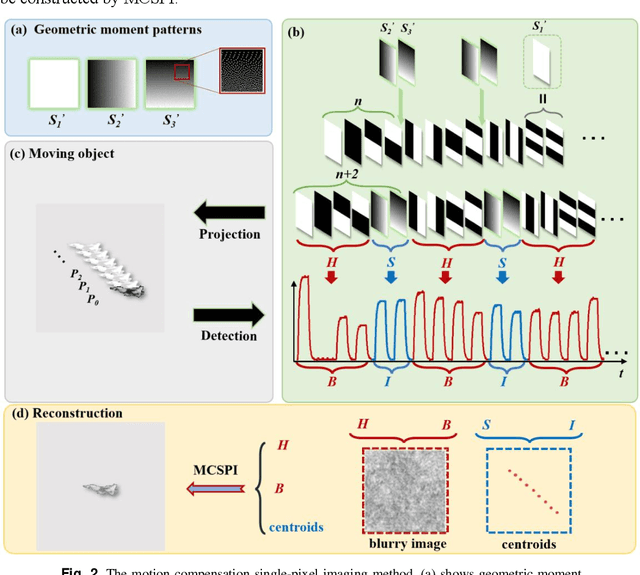
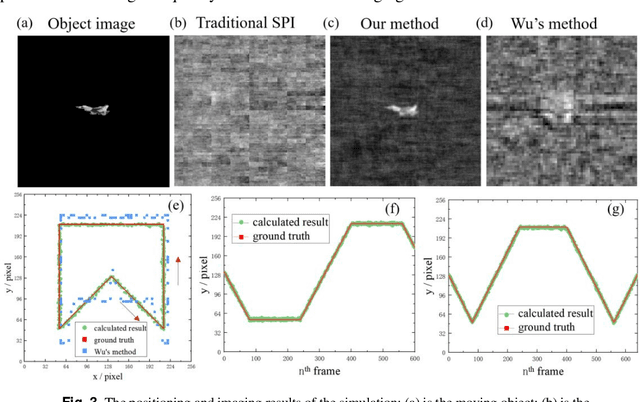
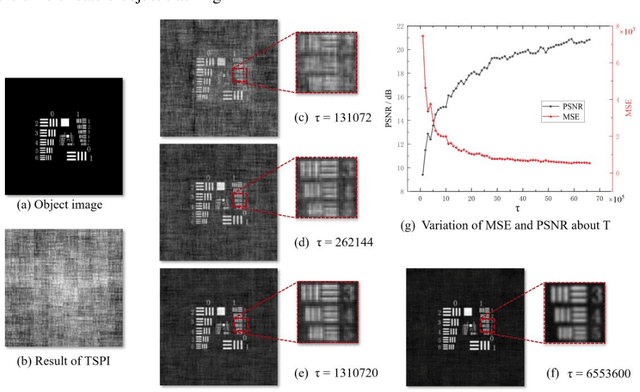
When imaging moving objects, single-pixel imaging produces motion blur. This paper proposes a new single-pixel imaging method, which can achieve anti-motion blur imaging of a fast-moving object. The geometric moment patterns and Hadamard patterns are used to alternately encode the position information and the image information of the object with time-division multiplexing. In the reconstruction process, the object position information is extracted independently and combining motion-compensation reconstruction algorithm to decouple the object motion from image information. As a result, the anti-motion blur image and the high frame rate object positions are obtained. Experimental results show that for a moving object with an angular velocity of up to 0.5rad/s relative to the imaging system, the proposed method achieves a localization frequency of 5.55kHz, and gradually reconstructs a clear image of the fast-moving object with a pseudo resolution of 512x512. The method has application prospects in single-pixel imaging of the fast-moving object.
Certifiably Optimal Mutual Localization with Anonymous Bearing Measurements
Mar 17, 2022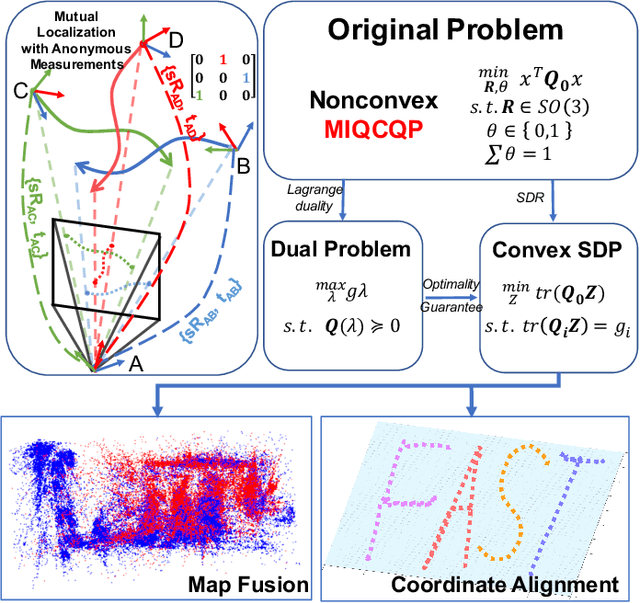
Mutual localization is essential for coordination and cooperation in multi-robot systems. Previous works have tackled this problem by assuming available correspondences between measurements and received odometry estimations, which are difficult to acquire, especially for unified robot teams. Furthermore, most local optimization methods ask for initial guesses and are sensitive to their quality. In this paper, we present a certifiably optimal algorithm that uses only anonymous bearing measurements to formulate a novel mixed-integer quadratically constrained quadratic problem (MIQCQP). Then, we relax the original nonconvex problem into a semidefinite programming (SDP) problem and obtain a certifiably global optimum using with off-the-shelf solvers. As a result, our method can determine bearing-pose correspondences and furthermore recover the initial relative poses between robots under a certain condition. We compare the performance with local optimization methods on extensive simulations under different noise levels to show our advantage in global optimality and robustness. Real-world experiments are conducted to show the practicality and robustness.
Meeting-Merging-Mission: A Multi-robot Coordinate Framework for Large-Scale Communication-Limited Exploration
Sep 16, 2021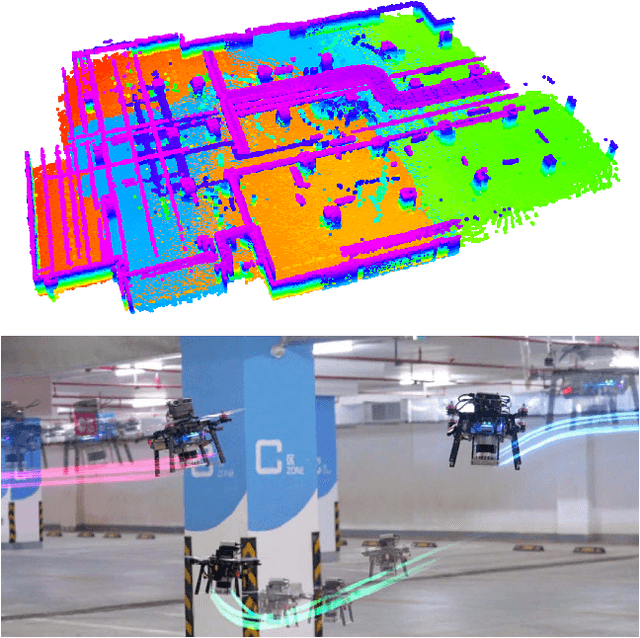
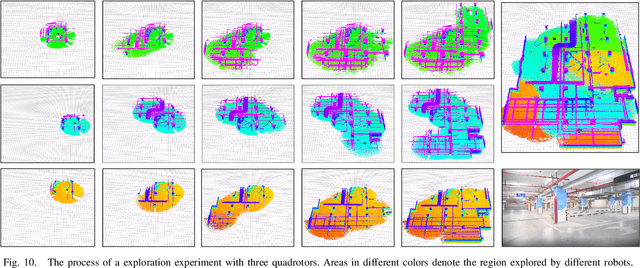
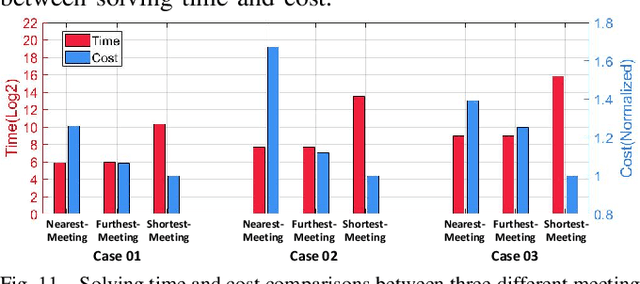
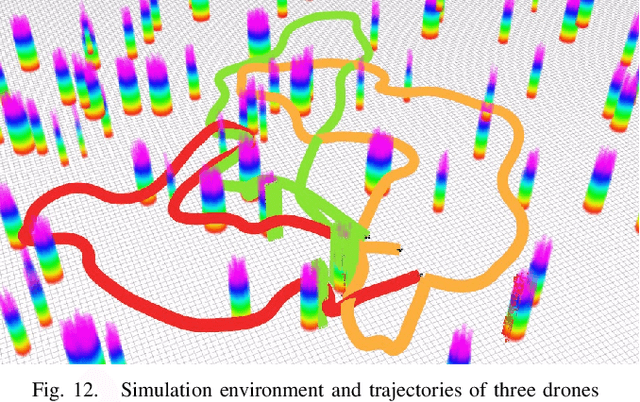
This letter presents a complete framework Meeting-Merging-Mission for multi-robot exploration under communication restriction. Considering communication is limited in both bandwidth and range in the real world, we propose a lightweight environment presentation method and an efficient cooperative exploration strategy. For lower bandwidth, each robot utilizes specific polytopes to maintains free space and super frontier information (SFI) as the source for exploration decision-making. To reduce repeated exploration, we develop a mission-based protocol that drives robots to share collected information in stable rendezvous. We also design a complete path planning scheme for both centralized and decentralized cases. To validate that our framework is practical and generic, we present an extensive benchmark and deploy our system into multi-UGV and multi-UAV platforms.
Autonomous Flights in Dynamic Environments with Onboard Vision
Mar 10, 2021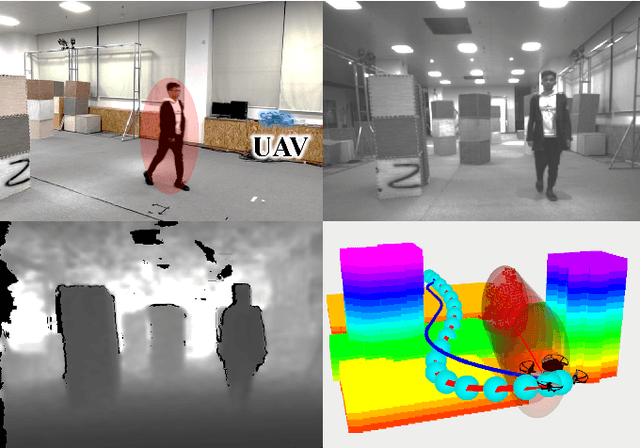
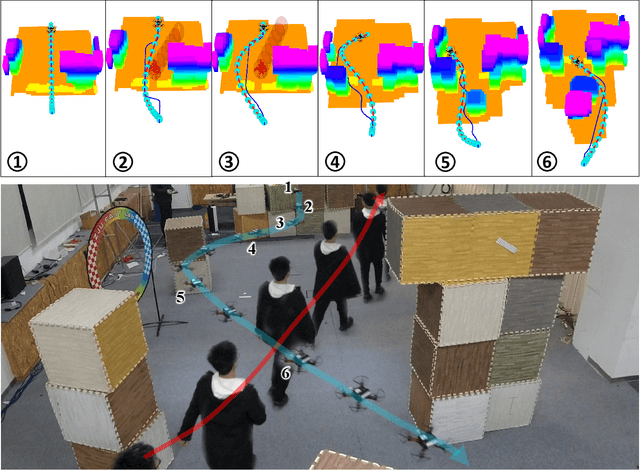
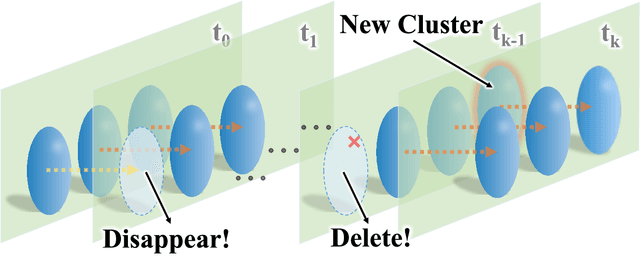
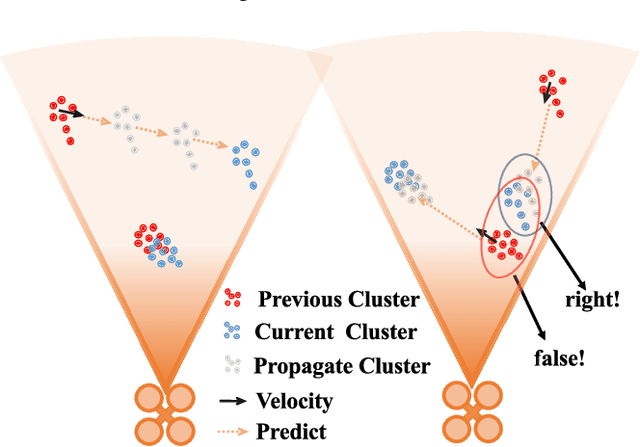
In this paper, we introduce a complete system for autonomous flight of quadrotors in dynamic environments with onboard sensing. Extended from existing work, we develop an occlusion-aware dynamic perception method based on depth images, which classifies obstacles as dynamic and static. For representing generic dynamic environment, we model dynamic objects with moving ellipsoids and fuse static ones into an occupancy grid map. To achieve dynamic avoidance, we design a planning method composed of modified kinodynamic path searching and gradient-based optimization. The method leverages manually constructed gradients without maintaining a signed distance field (SDF), making the planning procedure finished in milliseconds. We integrate the above methods into a customized quadrotor system and thoroughly test it in realworld experiments, verifying its effective collision avoidance in dynamic environments.
Mapless-Planner: A Robust and Fast Planning Framework for Aggressive Autonomous Flight without Map Fusion
Nov 11, 2020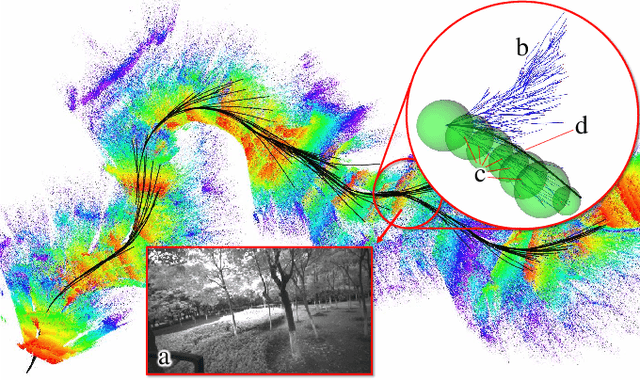
Maintaining a map online is resource-consuming while a robust navigation system usually needs environment abstraction via a well-fused map. In this paper, we propose a mapless planner which directly conducts such abstraction on the unfused sensor data. A limited-memory data structure with a reliable proximity query algorithm is proposed for maintaining raw historical information. A sampling-based scheme is designed to extract the free-space skeleton. A smart waypoint selection strategy enables to generate high-quality trajectories within the resultant flight corridors. Our planner differs from other mapless ones in that it can abstract and exploit the environment information efficiently. The online replan consistency and success rate are both significantly improved against conventional mapless methods.