 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAgile Fall Recovery for Quadrotors with Bidirectional Thrust via Reinforcement Learning
Jun 15, 2026Autonomous fall recovery is a critical capability for quadrotors operating in real-world environments, where collisions or failures may leave the vehicle resting on the ground in an arbitrary attitude. This problem is challenging because recovery must be achieved under limited onboard sensing, in constrained free space, with ground contact, and in the presence of unknown disturbances. In this letter, we present an RL-based framework for autonomous fall recovery of a quadrotor from arbitrary ground attitudes to stable hover using only lightweight onboard sensors. To address severe partial observability and intermittent sensor invalidity, we train a recurrent policy within an asymmetric actor--critic architecture, leveraging an Incremental Nonlinear Dynamic Inversion (INDI) controller to track the policy output. Combined with high-fidelity simulations of motor response and optical flow, the overall training framework significantly reduces the sim-to-real gap. Simulation ablation studies validate the importance of the main design choices, while real-world experiments demonstrate zero-shot transfer and robust recovery under different initial attitudes, wind disturbances, and additional payloads. These results demonstrate that agile quadrotor fall recovery can be achieved without explicit state estimation using only limited and unreliable onboard sensing.
FLIP: Real-Time and Resilient Formation Planning for Large-Scale DIstributed Swarms via Point Cloud Registration
May 28, 2026Traditional large-scale formation planning either oversimplify the formation representation which leads to poor performance, or they employ complete collaborative relationships, which results in excessive computational load. To achieve high-performance and large-scale formation planning, we transform the Optimal Formation Position Sequence \cite{c1} (OFPS) calculation problem into a spatiotemporal Point Cloud Registration (PCR) problem. Each agent derives its OFPS by distributively computing the matching result between current positions and the desired formation positions of all other agents. Then each agent optimizes the cooperative formation trajectory by using OFPS. We leverage the PCR method with outlier rejection to rapidly perform large-scale formation position registration. This prevents suboptimal trajectories and failed agents from propagating through the cooperative network and affecting more agents. Consequently, we uniformly achieve resilient, efficient, and distributed trajectory planning for large-scale swarms. The effectiveness and the superiority of the proposed method are demonstrated through large-scale simulations of 120-drone formation, and rigorous benchmarking against state-of-the-art (SOTA) methods.
Primitive-based Truncated Diffusion for Efficient Trajectory Generation of Differential Drive Mobile Manipulators
Apr 05, 2026We present a learning-enhanced motion planner for differential drive mobile manipulators to improve efficiency, success rate, and optimality. For task representation encoder, we propose a keypoint sequence extraction module that maps boundary states to 3D space via differentiable forward kinematics. Point clouds and keypoints are encoded separately and fused with attention, enabling effective integration of environment and boundary states information. We also propose a primitive-based truncated diffusion model that samples from a biased distribution. Compared with vanilla diffusion model, this framework improves the efficiency and diversity of the solution. Denoised paths are refined by trajectory optimization to ensure dynamic feasibility and task-specific optimality. In cluttered 3D simulations, our method achieves higher success rate, improved trajectory diversity, and competitive runtime compared to vanilla diffusion and classical baselines. The source code is released at https://github.com/nmoma/nmoma .
Primitive-Planner: An Ultra Lightweight Quadrotor Planner with Time-optimal Primitives
Feb 24, 2025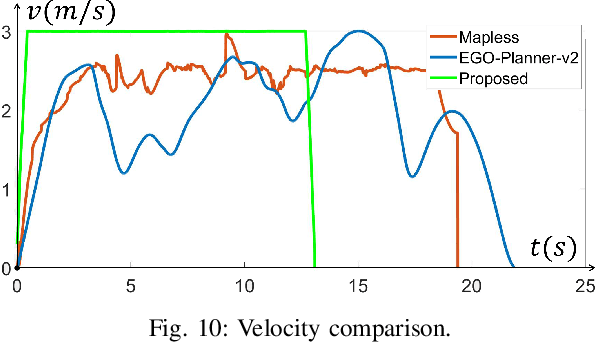
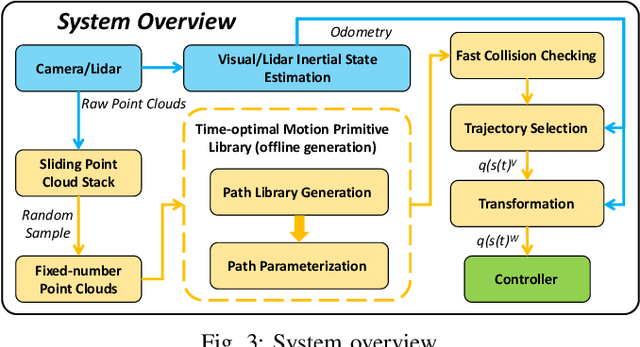
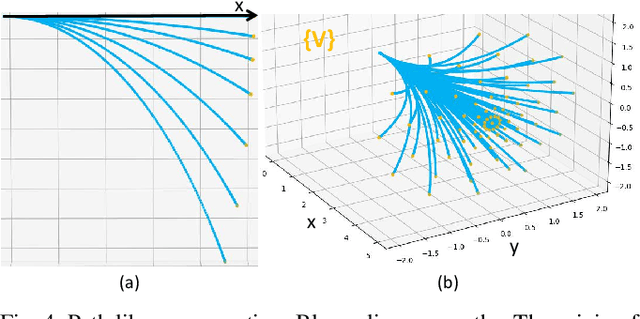
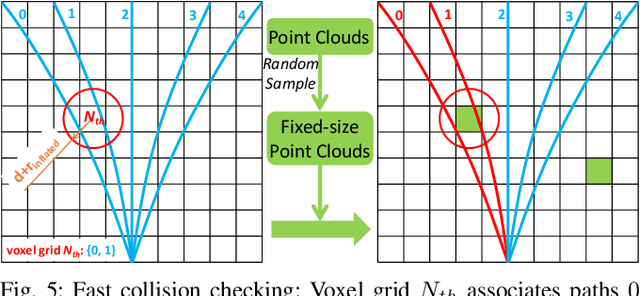
It is a significant requirement for a quadrotor trajectory planner to simultaneously guarantee trajectory quality and system lightweight. Many researchers focus on this problem, but there's still a gap between their performance and our common wish. In this paper, we propose an ultra lightweight quadrotor planner with time-optimal primitives. Firstly, a novel motion primitive library is proposed to generate time-optimal and dynamical feasible trajectories offline. Secondly, we propose a fast collision checking method with a deterministic time consumption, independent of the sampling resolution of the primitives. Finally, we select the minimum cost trajectory to execute among the safe primitives based on user-defined requirements. The propsed transformation relation between the local trajectories ensures the smoothness of the global trajectory. The planner reduces unnecessary online computing power consumption as much as possible, while ensuring a high-quality trajectory. Benchmark comparisons show that our method can generate the shortest flight time and distance of trajectory with the lowest computation overload. Challenging real-world experiments validate the robustness of our method.
Primitive-Swarm: An Ultra-lightweight and Scalable Planner for Large-scale Aerial Swarms
Feb 24, 2025



Achieving large-scale aerial swarms is challenging due to the inherent contradictions in balancing computational efficiency and scalability. This paper introduces Primitive-Swarm, an ultra-lightweight and scalable planner designed specifically for large-scale autonomous aerial swarms. The proposed approach adopts a decentralized and asynchronous replanning strategy. Within it is a novel motion primitive library consisting of time-optimal and dynamically feasible trajectories. They are generated utlizing a novel time-optimial path parameterization algorithm based on reachability analysis (TOPP-RA). Then, a rapid collision checking mechanism is developed by associating the motion primitives with the discrete surrounding space according to conflicts. By considering both spatial and temporal conflicts, the mechanism handles robot-obstacle and robot-robot collisions simultaneously. Then, during a replanning process, each robot selects the safe and minimum cost trajectory from the library based on user-defined requirements. Both the time-optimal motion primitive library and the occupancy information are computed offline, turning a time-consuming optimization problem into a linear-complexity selection problem. This enables the planner to comprehensively explore the non-convex, discontinuous 3-D safe space filled with numerous obstacles and robots, effectively identifying the best hidden path. Benchmark comparisons demonstrate that our method achieves the shortest flight time and traveled distance with a computation time of less than 1 ms in dense environments. Super large-scale swarm simulations, involving up to 1000 robots, running in real-time, verify the scalability of our method. Real-world experiments validate the feasibility and robustness of our approach. The code will be released to foster community collaboration.
Oracle Bone Script Similiar Character Screening Approach Based on Simsiam Contrastive Learning and Supervised Learning
Aug 13, 2024



This project proposes a new method that uses fuzzy comprehensive evaluation method to integrate ResNet-50 self-supervised and RepVGG supervised learning. The source image dataset HWOBC oracle is taken as input, the target image is selected, and finally the most similar image is output in turn without any manual intervention. The same feature encoding method is not used for images of different modalities. Before the model training, the image data is preprocessed, and the image is enhanced by random rotation processing, self-square graph equalization theory algorithm, and gamma transform, which effectively enhances the key feature learning. Finally, the fuzzy comprehensive evaluation method is used to combine the results of supervised training and unsupervised training, which can better solve the "most similar" problem that is difficult to quantify. At present, there are many unknown oracle-bone inscriptions waiting for us to crack. Contacting with the glyphs can provide new ideas for cracking.
Enhanced Decentralized Autonomous Aerial Swarm with Group Planning
Mar 02, 2022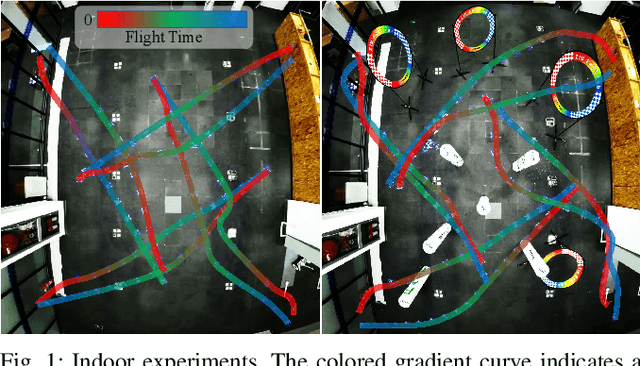
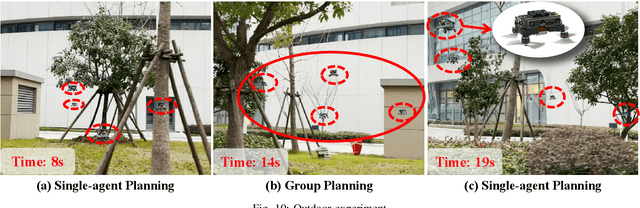
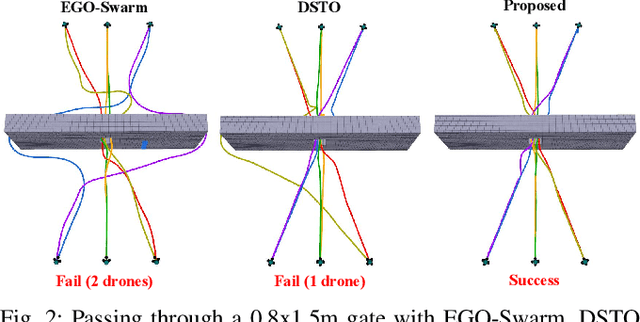
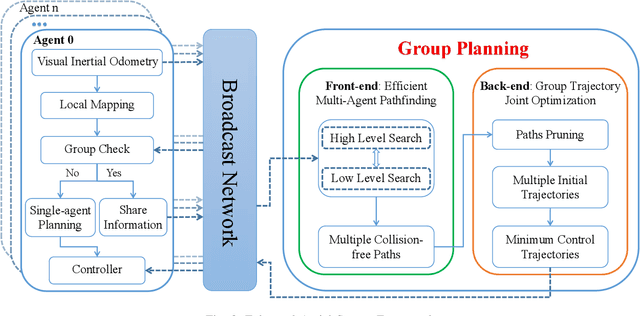
Autonomous aerial swarm remains a grand challenge in robotics. Existing works in this field can be categorized as centralized and decentralized. Centralized methods suffer from scale dilemmas, while decentralized ones often lead to poor planning quality. In this paper, we propose an enhanced decentralized autonomous aerial swarm system with group planning. According to the spatial distribution of agents, the system dynamically divides the swarm into several groups and isolated agents. For conflicts within each group, we propose a novel coordination mechanism named group planning. The group planning consists of efficient multi-agent pathfinding and trajectory joint optimization, which can significantly improve the planning quality and success rate. We demonstrate simulations and real-world experiments that our method not only has applicability for a large-scale swarm, but also has top-level planning quality.