 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgePrimitive-Swarm: An Ultra-lightweight and Scalable Planner for Large-scale Aerial Swarms
Feb 24, 2025



Achieving large-scale aerial swarms is challenging due to the inherent contradictions in balancing computational efficiency and scalability. This paper introduces Primitive-Swarm, an ultra-lightweight and scalable planner designed specifically for large-scale autonomous aerial swarms. The proposed approach adopts a decentralized and asynchronous replanning strategy. Within it is a novel motion primitive library consisting of time-optimal and dynamically feasible trajectories. They are generated utlizing a novel time-optimial path parameterization algorithm based on reachability analysis (TOPP-RA). Then, a rapid collision checking mechanism is developed by associating the motion primitives with the discrete surrounding space according to conflicts. By considering both spatial and temporal conflicts, the mechanism handles robot-obstacle and robot-robot collisions simultaneously. Then, during a replanning process, each robot selects the safe and minimum cost trajectory from the library based on user-defined requirements. Both the time-optimal motion primitive library and the occupancy information are computed offline, turning a time-consuming optimization problem into a linear-complexity selection problem. This enables the planner to comprehensively explore the non-convex, discontinuous 3-D safe space filled with numerous obstacles and robots, effectively identifying the best hidden path. Benchmark comparisons demonstrate that our method achieves the shortest flight time and traveled distance with a computation time of less than 1 ms in dense environments. Super large-scale swarm simulations, involving up to 1000 robots, running in real-time, verify the scalability of our method. Real-world experiments validate the feasibility and robustness of our approach. The code will be released to foster community collaboration.
Primitive-Planner: An Ultra Lightweight Quadrotor Planner with Time-optimal Primitives
Feb 24, 2025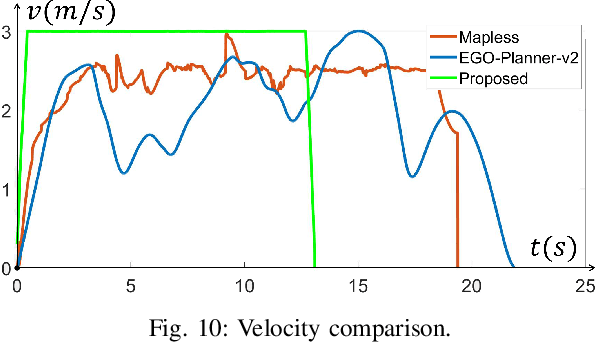
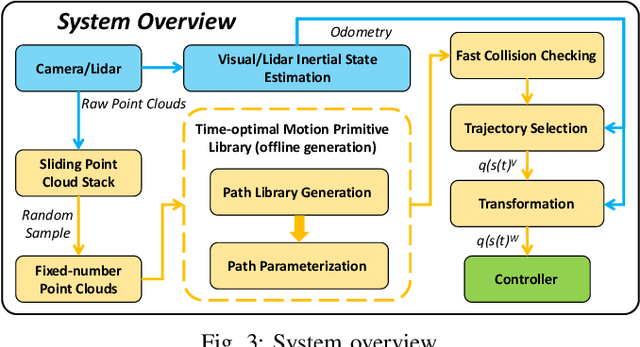
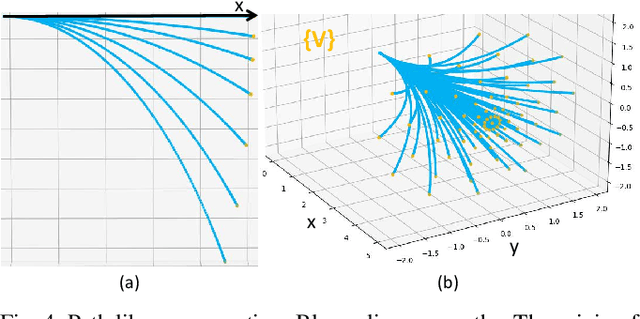
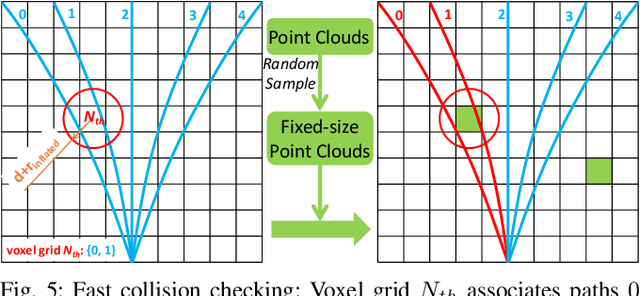
It is a significant requirement for a quadrotor trajectory planner to simultaneously guarantee trajectory quality and system lightweight. Many researchers focus on this problem, but there's still a gap between their performance and our common wish. In this paper, we propose an ultra lightweight quadrotor planner with time-optimal primitives. Firstly, a novel motion primitive library is proposed to generate time-optimal and dynamical feasible trajectories offline. Secondly, we propose a fast collision checking method with a deterministic time consumption, independent of the sampling resolution of the primitives. Finally, we select the minimum cost trajectory to execute among the safe primitives based on user-defined requirements. The propsed transformation relation between the local trajectories ensures the smoothness of the global trajectory. The planner reduces unnecessary online computing power consumption as much as possible, while ensuring a high-quality trajectory. Benchmark comparisons show that our method can generate the shortest flight time and distance of trajectory with the lowest computation overload. Challenging real-world experiments validate the robustness of our method.
Skater: A Novel Bi-modal Bi-copter Robot for Adaptive Locomotion in Air and Diverse Terrain
Mar 04, 2024



In this letter, we present a novel bi-modal bi-copter robot called Skater, which is adaptable to air and various ground surfaces. Skater consists of a bi-copter moving along its longitudinal direction with two passive wheels on both sides. Using longitudinally arranged bi-copter as the unified actuation system for both aerial and ground modes, this robot not only keeps concise and lightweight mechanism, but also possesses exceptional terrain traversing capability and strong steering capacity. Moreover, leveraging the vectored thrust characteristic of bi-copters, Skater can actively generate the centripetal force needed for steering, enabling it to achieve stable movement even on slippery surfaces. Furthermore, we model the comprehensive dynamics of Skater, analyze its differential flatness and introduce a controller using nonlinear model predictive control for trajectory tracking. The outstanding performance of the system is verified by extensive real-world experiments and benchmark comparisons.
Star-Searcher: A Complete and Efficient Aerial System for Autonomous Target Search in Complex Unknown Environments
Feb 26, 2024This paper tackles the challenge of autonomous target search using unmanned aerial vehicles (UAVs) in complex unknown environments. To fill the gap in systematic approaches for this task, we introduce Star-Searcher, an aerial system featuring specialized sensor suites, mapping, and planning modules to optimize searching. Path planning challenges due to increased inspection requirements are addressed through a hierarchical planner with a visibility-based viewpoint clustering method. This simplifies planning by breaking it into global and local sub-problems, ensuring efficient global and local path coverage in real-time. Furthermore, our global path planning employs a history-aware mechanism to reduce motion inconsistency from frequent map changes, significantly enhancing search efficiency. We conduct comparisons with state-of-the-art methods in both simulation and the real world, demonstrating shorter flight paths, reduced time, and higher target search completeness. Our approach will be open-sourced for community benefit at https://github.com/SYSU-STAR/STAR-Searcher.
Elastic Tracker: A Spatio-temporal Trajectory Planner Flexible Aerial Tracking
Sep 15, 2021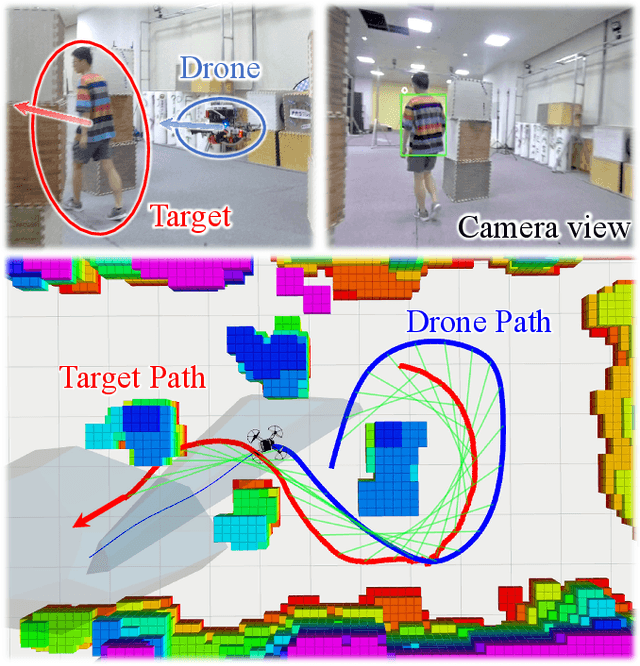
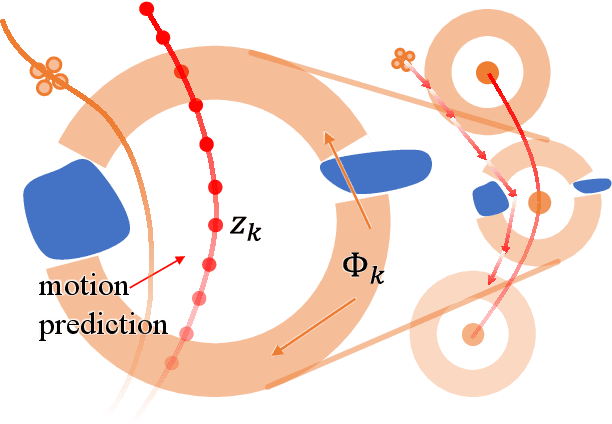
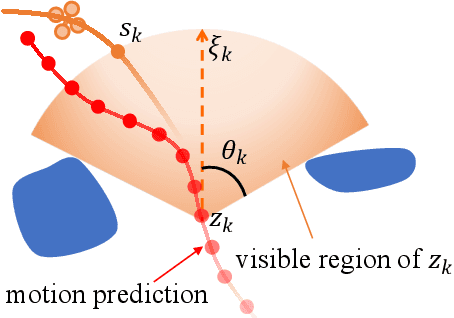
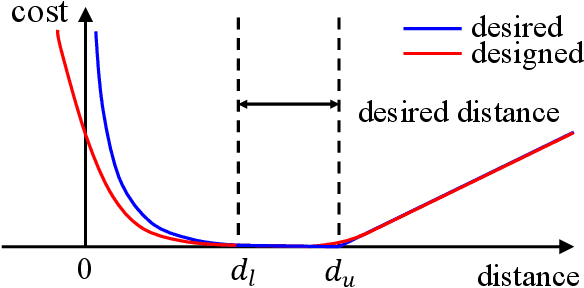
This paper proposes Elastic Tracker, a flexible trajectory planning framework that can deal with challenging tracking tasks with guaranteed safety and visibility. Firstly, an object detection and intension-free motion prediction method is designed. Then an occlusion-aware path finding method is proposed to provide a proper topology. A smart safe flight corridor generation strategy is designed with the guiding path. An analytical occlusion cost is evaluated. Finally, an effective trajectory optimization approach enables to generate a spatio-temporal optimal trajectory within the resultant flight corridor. Particular formulations are designed to guarantee both safety and visibility, with all the above requirements optimized jointly. The experimental results show that our method works more robustly but with less computation than the existing methods, even in some challenging tracking tasks.
Fast-Tracker 2.0: Improving Autonomy of Aerial Tracking with Active Vision and Human Location Regression
Mar 11, 2021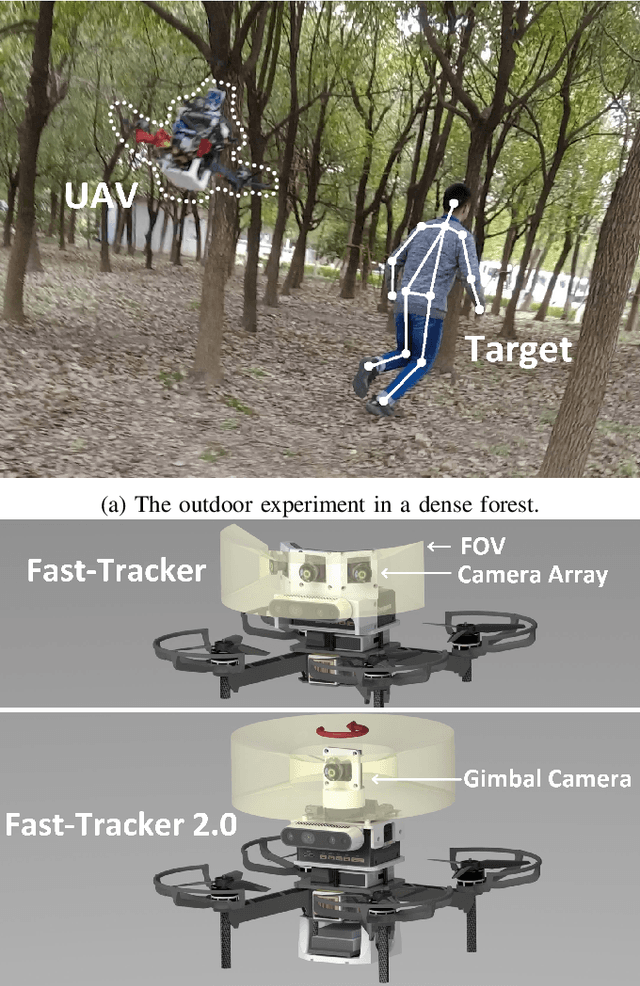
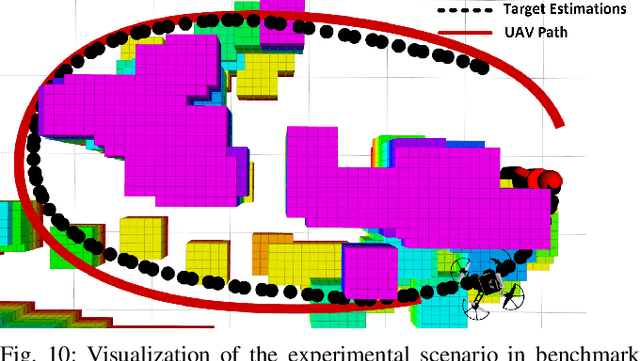
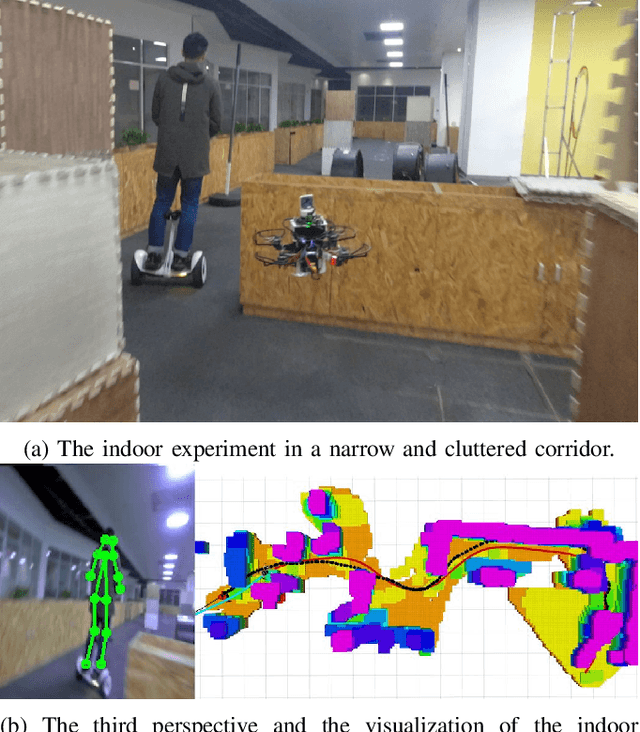
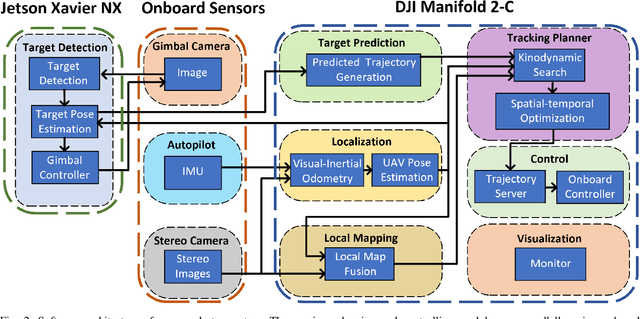
In recent years, several progressive works promote the development of aerial tracking. One of the representative works is our previous work Fast-tracker which is applicable to various challenging tracking scenarios. However, it suffers from two main drawbacks: 1) the over simplification in target detection by using artificial markers and 2) the contradiction between simultaneous target and environment perception with limited onboard vision. In this paper, we upgrade the target detection in Fast-tracker to detect and localize a human target based on deep learning and non-linear regression to solve the former problem. For the latter one, we equip the quadrotor system with 360 degree active vision on a customized gimbal camera. Furthermore, we improve the tracking trajectory planning in Fast-tracker by incorporating an occlusion-aware mechanism that generates observable tracking trajectories. Comprehensive real-world tests confirm the proposed system's robustness and real-time capability. Benchmark comparisons with Fast-tracker validate that the proposed system presents better tracking performance even when performing more difficult tracking tasks.
Fast-Tracker: A Robust Aerial System for Tracking Agile Target in Cluttered Environments
Nov 08, 2020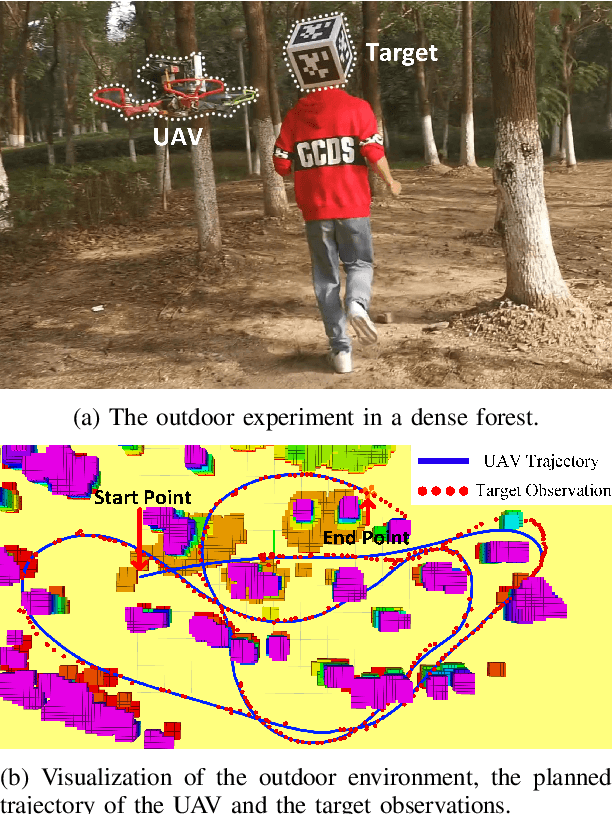
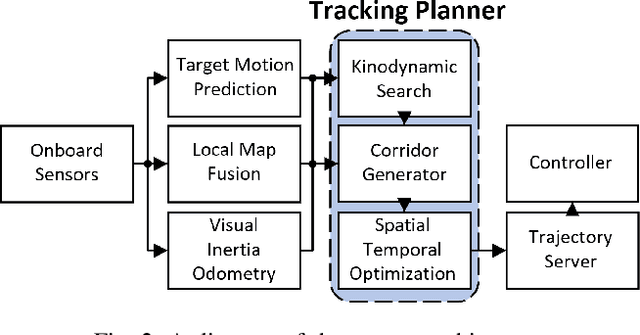
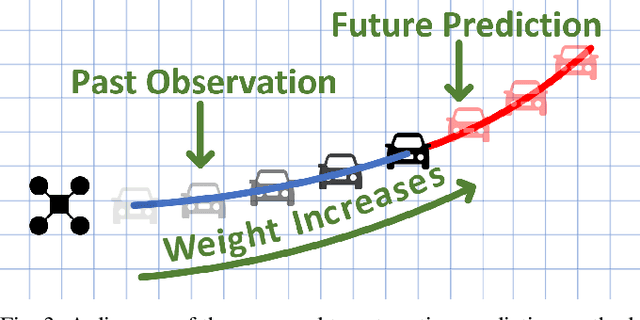
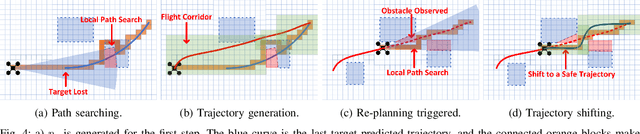
This paper proposes a systematic solution that uses an unmanned aerial vehicle (UAV) to aggressively and safely track an agile target. The solution properly handles the challenging situations where the intent of the target and the dense environments are unknown to the UAV. Our work is divided into two parts: target motion prediction and tracking trajectory planning. The target motion prediction method utilizes target observations to reliably predict the future motion of the target considering dynamic constraints. The tracking trajectory planner follows the traditional hierarchical workflow.A target informed kinodynamic searching method is adopted as the front-end, which heuristically searches for a safe tracking trajectory. The back-end optimizer then refines it into a spatial-temporal optimal and collision-free trajectory. The proposed solution is integrated into an onboard quadrotor system. We fully test the system in challenging real-world tracking missions.Moreover, benchmark comparisons validate that the proposed method surpasses the cutting-edge methods on time efficiency and tracking effectiveness.