 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSHOW3D: Capturing Scenes of 3D Hands and Objects in the Wild
Mar 30, 2026Accurate 3D understanding of human hands and objects during manipulation remains a significant challenge for egocentric computer vision. Existing hand-object interaction datasets are predominantly captured in controlled studio settings, which limits both environmental diversity and the ability of models trained on such data to generalize to real-world scenarios. To address this challenge, we introduce a novel marker-less multi-camera system that allows for nearly unconstrained mobility in genuinely in-the-wild conditions, while still having the ability to generate precise 3D annotations of hands and objects. The capture system consists of a lightweight, back-mounted, multi-camera rig that is synchronized and calibrated with a user-worn VR headset. For 3D ground-truth annotation of hands and objects, we develop an ego-exo tracking pipeline and rigorously evaluate its quality. Finally, we present SHOW3D, the first large-scale dataset with 3D annotations that show hands interacting with objects in diverse real-world environments, including outdoor settings. Our approach significantly reduces the fundamental trade-off between environmental realism and accuracy of 3D annotations, which we validate with experiments on several downstream tasks. show3d-dataset.github.io
LLaMo: Scaling Pretrained Language Models for Unified Motion Understanding and Generation with Continuous Autoregressive Tokens
Feb 12, 2026Recent progress in large models has led to significant advances in unified multimodal generation and understanding. However, the development of models that unify motion-language generation and understanding remains largely underexplored. Existing approaches often fine-tune large language models (LLMs) on paired motion-text data, which can result in catastrophic forgetting of linguistic capabilities due to the limited scale of available text-motion pairs. Furthermore, prior methods typically convert motion into discrete representations via quantization to integrate with language models, introducing substantial jitter artifacts from discrete tokenization. To address these challenges, we propose LLaMo, a unified framework that extends pretrained LLMs through a modality-specific Mixture-of-Transformers (MoT) architecture. This design inherently preserves the language understanding of the base model while enabling scalable multimodal adaptation. We encode human motion into a causal continuous latent space and maintain the next-token prediction paradigm in the decoder-only backbone through a lightweight flow-matching head, allowing for streaming motion generation in real-time (>30 FPS). Leveraging the comprehensive language understanding of pretrained LLMs and large-scale motion-text pretraining, our experiments demonstrate that LLaMo achieves high-fidelity text-to-motion generation and motion-to-text captioning in general settings, especially zero-shot motion generation, marking a significant step towards a general unified motion-language large model.
RIGA: Rotation-Invariant and Globally-Aware Descriptors for Point Cloud Registration
Sep 27, 2022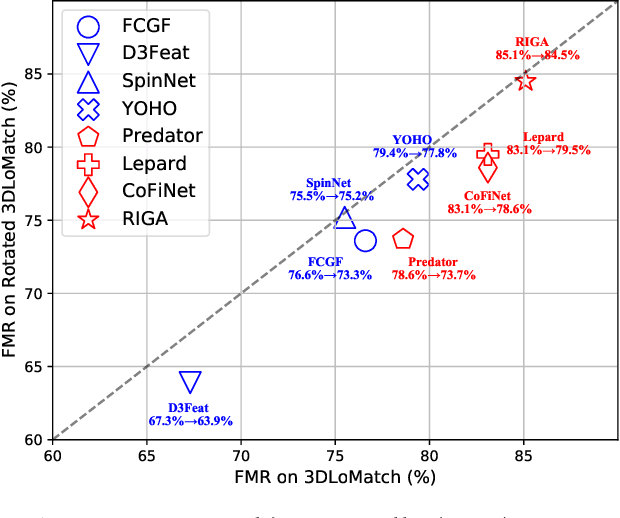
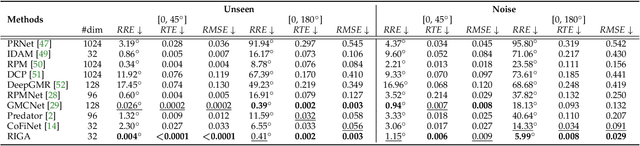
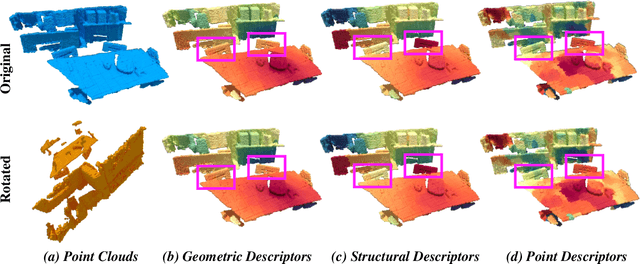
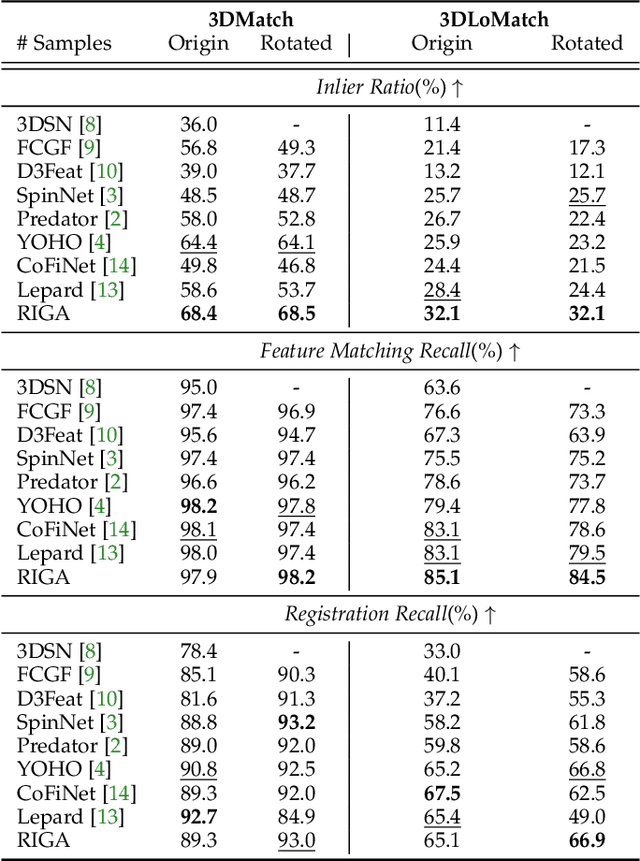
Successful point cloud registration relies on accurate correspondences established upon powerful descriptors. However, existing neural descriptors either leverage a rotation-variant backbone whose performance declines under large rotations, or encode local geometry that is less distinctive. To address this issue, we introduce RIGA to learn descriptors that are Rotation-Invariant by design and Globally-Aware. From the Point Pair Features (PPFs) of sparse local regions, rotation-invariant local geometry is encoded into geometric descriptors. Global awareness of 3D structures and geometric context is subsequently incorporated, both in a rotation-invariant fashion. More specifically, 3D structures of the whole frame are first represented by our global PPF signatures, from which structural descriptors are learned to help geometric descriptors sense the 3D world beyond local regions. Geometric context from the whole scene is then globally aggregated into descriptors. Finally, the description of sparse regions is interpolated to dense point descriptors, from which correspondences are extracted for registration. To validate our approach, we conduct extensive experiments on both object- and scene-level data. With large rotations, RIGA surpasses the state-of-the-art methods by a margin of 8\degree in terms of the Relative Rotation Error on ModelNet40 and improves the Feature Matching Recall by at least 5 percentage points on 3DLoMatch.
Multi-View Object Pose Refinement With Differentiable Renderer
Jul 06, 2022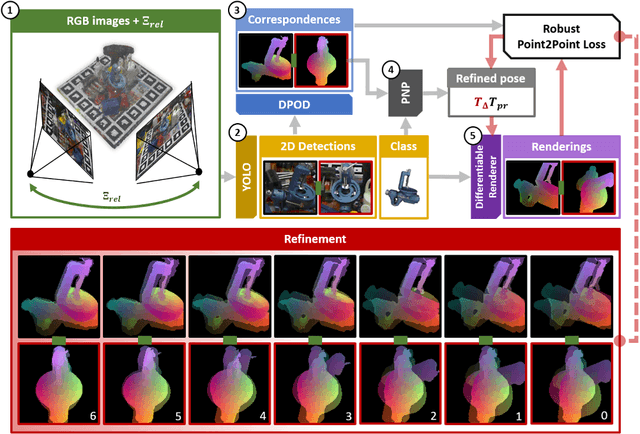
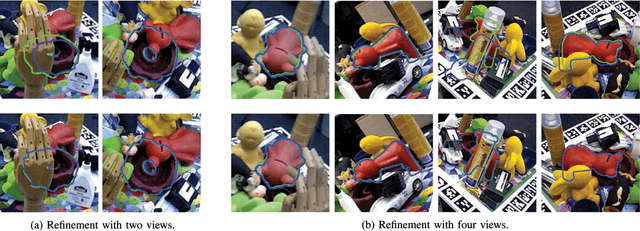

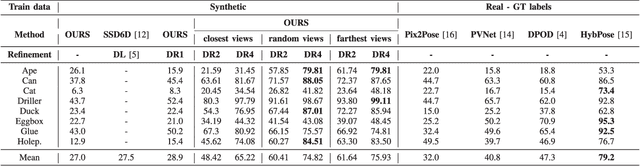
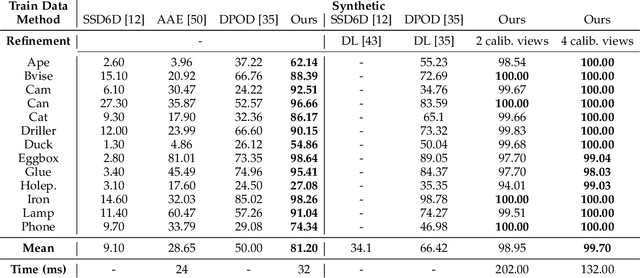
This paper introduces a novel multi-view 6 DoF object pose refinement approach focusing on improving methods trained on synthetic data. It is based on the DPOD detector, which produces dense 2D-3D correspondences between the model vertices and the image pixels in each frame. We have opted for the use of multiple frames with known relative camera transformations, as it allows introduction of geometrical constraints via an interpretable ICP-like loss function. The loss function is implemented with a differentiable renderer and is optimized iteratively. We also demonstrate that a full detection and refinement pipeline, which is trained solely on synthetic data, can be used for auto-labeling real data. We perform quantitative evaluation on LineMOD, Occlusion, Homebrewed and YCB-V datasets and report excellent performance in comparison to the state-of-the-art methods trained on the synthetic and real data. We demonstrate empirically that our approach requires only a few frames and is robust to close camera locations and noise in extrinsic camera calibration, making its practical usage easier and more ubiquitous.
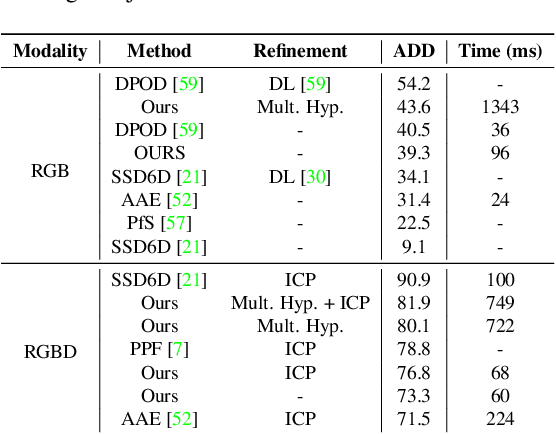
DPODv2: Dense Correspondence-Based 6 DoF Pose Estimation
Jul 06, 2022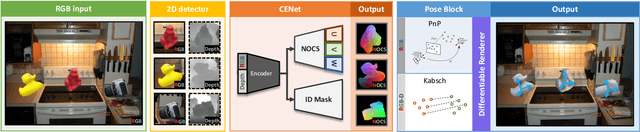

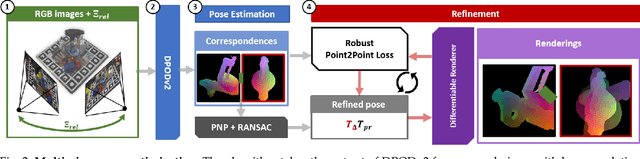
We propose a three-stage 6 DoF object detection method called DPODv2 (Dense Pose Object Detector) that relies on dense correspondences. We combine a 2D object detector with a dense correspondence estimation network and a multi-view pose refinement method to estimate a full 6 DoF pose. Unlike other deep learning methods that are typically restricted to monocular RGB images, we propose a unified deep learning network allowing different imaging modalities to be used (RGB or Depth). Moreover, we propose a novel pose refinement method, that is based on differentiable rendering. The main concept is to compare predicted and rendered correspondences in multiple views to obtain a pose which is consistent with predicted correspondences in all views. Our proposed method is evaluated rigorously on different data modalities and types of training data in a controlled setup. The main conclusions is that RGB excels in correspondence estimation, while depth contributes to the pose accuracy if good 3D-3D correspondences are available. Naturally, their combination achieves the overall best performance. We perform an extensive evaluation and an ablation study to analyze and validate the results on several challenging datasets. DPODv2 achieves excellent results on all of them while still remaining fast and scalable independent of the used data modality and the type of training data
OSOP: A Multi-Stage One Shot Object Pose Estimation Framework
Mar 30, 2022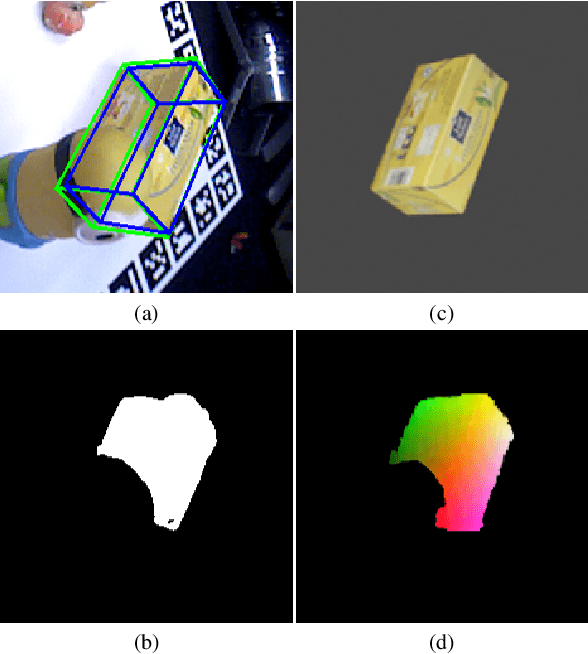
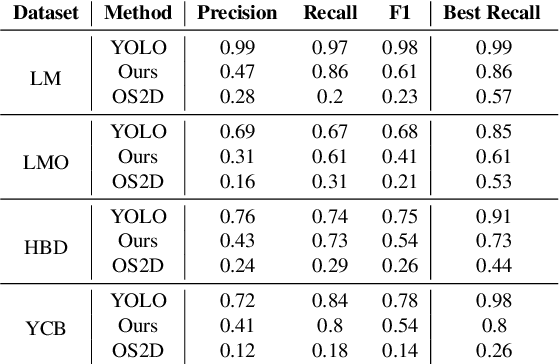
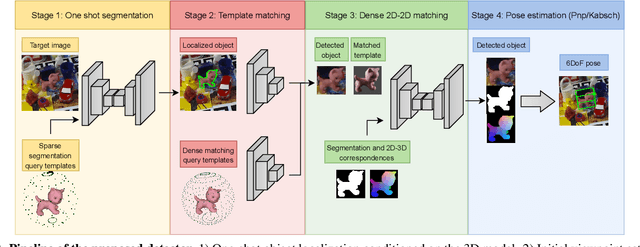
We present a novel one-shot method for object detection and 6 DoF pose estimation, that does not require training on target objects. At test time, it takes as input a target image and a textured 3D query model. The core idea is to represent a 3D model with a number of 2D templates rendered from different viewpoints. This enables CNN-based direct dense feature extraction and matching. The object is first localized in 2D, then its approximate viewpoint is estimated, followed by dense 2D-3D correspondence prediction. The final pose is computed with PnP. We evaluate the method on LineMOD, Occlusion, Homebrewed, YCB-V and TLESS datasets and report very competitive performance in comparison to the state-of-the-art methods trained on synthetic data, even though our method is not trained on the object models used for testing.
NeRF-Pose: A First-Reconstruct-Then-Regress Approach for Weakly-supervised 6D Object Pose Estimation
Mar 09, 2022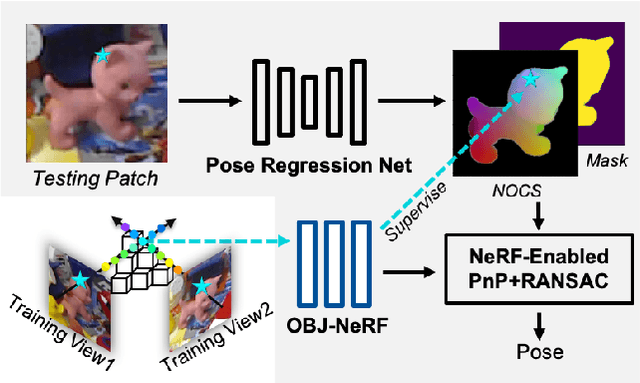
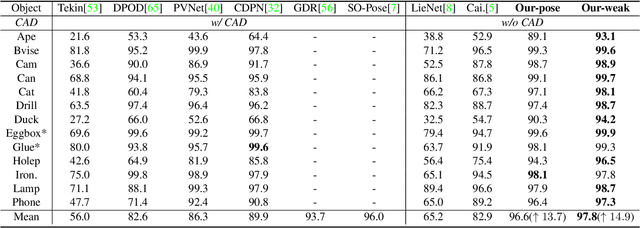
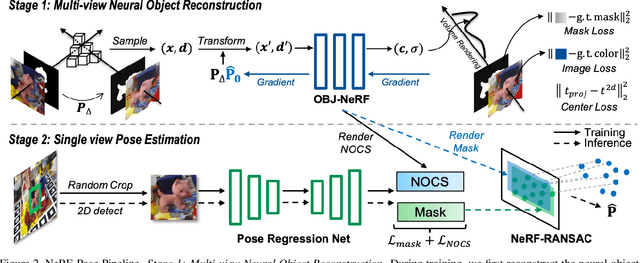
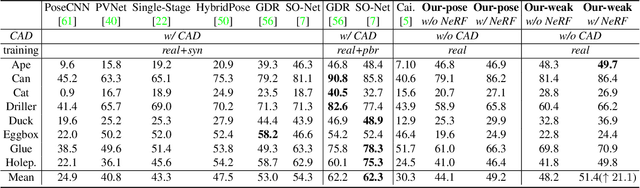
Pose estimation of 3D objects in monocular images is a fundamental and long-standing problem in computer vision. Existing deep learning approaches for 6D pose estimation typically rely on the assumption of availability of 3D object models and 6D pose annotations. However, precise annotation of 6D poses in real data is intricate, time-consuming and not scalable, while synthetic data scales well but lacks realism. To avoid these problems, we present a weakly-supervised reconstruction-based pipeline, named NeRF-Pose, which needs only 2D object segmentation and known relative camera poses during training. Following the first-reconstruct-then-regress idea, we first reconstruct the objects from multiple views in the form of an implicit neural representation. Then, we train a pose regression network to predict pixel-wise 2D-3D correspondences between images and the reconstructed model. At inference, the approach only needs a single image as input. A NeRF-enabled PnP+RANSAC algorithm is used to estimate stable and accurate pose from the predicted correspondences. Experiments on LineMod and LineMod-Occlusion show that the proposed method has state-of-the-art accuracy in comparison to the best 6D pose estimation methods in spite of being trained only with weak labels. Besides, we extend the Homebrewed DB dataset with more real training images to support the weakly supervised task and achieve compelling results on this dataset. The extended dataset and code will be released soon.
DPOD: 6D Pose Object Detector and Refiner
Apr 08, 2019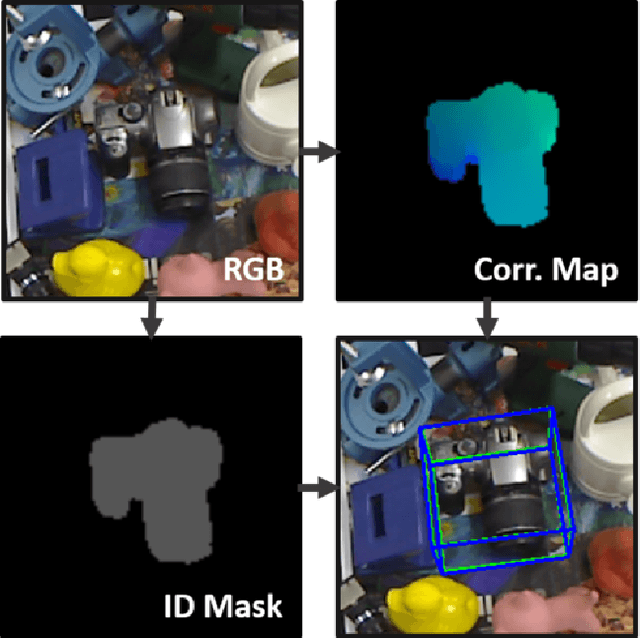
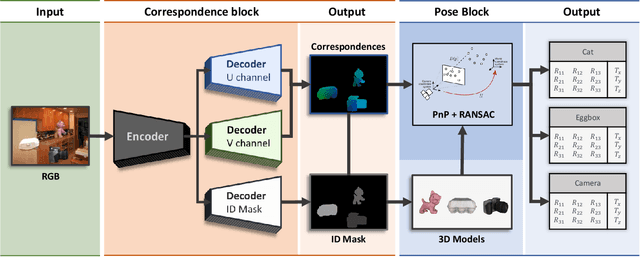

In this paper we present a novel deep learning method for 3D object detection and 6D pose estimation from RGB images. Our method, named DPOD (Dense Pose Object Detector), estimates dense multi-class 2D-3D correspondence maps between an input image and available 3D models. Given the correspondences, a 6DoF pose is computed via PnP and RANSAC. An additional RGB pose refinement of the initial pose estimates is performed using a custom deep learning based refinement scheme. Our results and comparison to a vast number of related works demonstrate that a large number of correspondences is beneficial for obtaining high quality 6D poses both before and after refinement. Unlike other methods that mainly use real data for training and do not train on synthetic renderings, we perform evaluation on both synthetic and real training data demonstrating superior results before and after refinement when compared to all recent detectors. While being precise, the presented approach is still real-time capable.
HomebrewedDB: RGB-D Dataset for 6D Pose Estimation of 3D Objects
Apr 05, 2019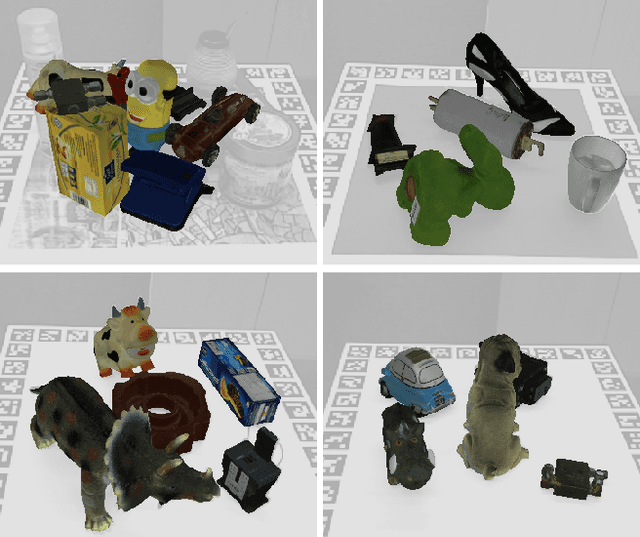
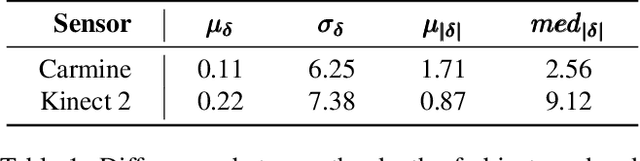

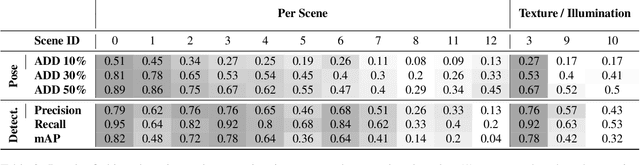
One of the most important prerequisites for creating and evaluating 6D object pose detectors are datasets with labeled 6D poses. In the advent of deep learning methods, demand for such datasets is consinuously arising. Despite the fact that some of those exist, they are scarce and typically have restricted setups, e.g. a single object per sequence, or focus on specific object types, such as textureless industrial parts. Besides, two significant components are often ignored: training only from available 3D models instead of real data and scalability, i.e. training one method to detect all objects rather than training one detector per object. Other challenges, such as occlusions, changing light conditions and object appearance changes, as well as precisely defined benchmarks are either not present or scattered among different datasets. In this paper we present dataset for 6D pose estimation that covers the above-mentioned challenges, mainly targeting training from 3D models (both textured and textureless), scalability, occlusions, light and object appearance changes. The dataset features 33 objects (17 toy, 8 household and 8 industry-relevant objects) over 13 scenes of various difficulty. Moreover, we present a set benchmarks with the purpose of testing various desired properties of the detectors, particularly focusing on scalability with respect to the number of objects, resistance to changing light conditions, occlusions and clutter. We also set a baseline for the presented benchmarks using a publicly available state of the art detector. Considering difficulties in making such datasets, we plan to release the code allowing other researchers to extend this dataset or make their own datasets in the future.