 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFlowTime: Towards Continuous Generative Watch Time Prediction via Flow-based Personalized Priors
May 31, 2026Watch time has emerged as a pivotal metric for optimizing deep user engagement in short-video recommender systems. However, current methods of watch time prediction (WTP) suffer from inherent paradigm-specific limitations. Direct Regression faces mean-collapse due to unimodal Gaussian assumptions, while Ordinal Regression is hampered by quantization errors from rigid discretization. Similarly, Discrete Generative Regression struggles with high inference latency and heuristic vocabulary design. Beyond these specific flaws, a shared deficiency is the inability to capture the intrinsic multimodality and heterogeneity of User-Item Interaction Patterns. To address these challenges, we first revisit the WTP problem from a causal perspective and identify these user-specific patterns as structural confounders that modulate watch time outcomes, where identical interests manifest as distinct watch time outcomes conditioned on diverse user habits. Then, we formally propose a new (or the fourth) paradigm -- Continuous Generative Regression, and introduce FlowTime, a novel method utilizing a One-step Generative Variational Autoencoder. FlowTime effectively circumvents the latency of iterative denoising while maintaining the expressivity of continuous latent spaces. Furthermore, we design a Flow-based Personalized Prior that leverages NFs to warp a standard Gaussian prior into a complex, history-conditioned manifold, thereby enabling the adaptive modeling of multimodal interaction patterns. Finally, we build TimeRec, the first open-source WTP Library, alongside a novel personalization metric to establish a rigorous benchmarking standard. Extensive offline experiments and online A/B tests demonstrate FlowTime's significant superiority over SOTA methods.
CoRMA: Contrastive RMA for Contact-Rich Meta-Adaptation
May 21, 2026We present CoRMA(Contrastive Robotic Motor Adaptation), a context-based meta-adaptation framework that modifies RMA for force-dominant assembly. CoRMA replaces raw simulator-parameter adaptation with a compact 6D simulator-only semantic contact context describing contact onset, lateral engagement, guided transition, contact direction, and jamming. A deployable causal Transformer adapter infers this context online from force, proprioceptive, and action histories using semantic regression and a force-regime contrastive objective. At deployment, oracle context is removed and replaced by the inferred context, enabling within-episode adaptation without demonstrations, privileged inputs, or gradient updates. We evaluate CoRMA on PegInsert, GearMesh, and NutThread in Isaac Lab / Isaac Sim~5.0 and on a real Marvin arm. Compared with FORGE baselines that achieve high simulation success but degrade substantially on hardware, CoRMA retains higher verified real success under controlled target-pose noise. These results support semantic contact inference as a reusable adaptation interface within a related assembly task family, while broader unseen-task generalization and Real2Sim calibration remain future work.
FD$^2$: A Dedicated Framework for Fine-Grained Dataset Distillation
Mar 26, 2026Dataset distillation (DD) compresses a large training set into a small synthetic set, reducing storage and training cost, and has shown strong results on general benchmarks. Decoupled DD further improves efficiency by splitting the pipeline into pretraining, sample distillation, and soft-label generation. However, existing decoupled methods largely rely on coarse class-label supervision and optimize samples within each class in a nearly identical manner. On fine-grained datasets, this often yields distilled samples that (i) retain large intra-class variation with subtle inter-class differences and (ii) become overly similar within the same class, limiting localized discriminative cues and hurting recognition. To solve the above-mentioned problems, we propose FD$^{2}$, a dedicated framework for Fine-grained Dataset Distillation. FD$^{2}$ localizes discriminative regions and constructs fine-grained representations for distillation. During pretraining, counterfactual attention learning aggregates discriminative representations to update class prototypes. During distillation, a fine-grained characteristic constraint aligns each sample with its class prototype while repelling others, and a similarity constraint diversifies attention across same-class samples. Experiments on multiple fine-grained and general datasets show that FD$^{2}$ integrates seamlessly with decoupled DD and improves performance in most settings, indicating strong transferability.
MS-DETR: Towards Effective Video Moment Retrieval and Highlight Detection by Joint Motion-Semantic Learning
Jul 16, 2025Video Moment Retrieval (MR) and Highlight Detection (HD) aim to pinpoint specific moments and assess clip-wise relevance based on the text query. While DETR-based joint frameworks have made significant strides, there remains untapped potential in harnessing the intricate relationships between temporal motion and spatial semantics within video content. In this paper, we propose the Motion-Semantics DETR (MS-DETR), a framework that captures rich motion-semantics features through unified learning for MR/HD tasks. The encoder first explicitly models disentangled intra-modal correlations within motion and semantics dimensions, guided by the given text queries. Subsequently, the decoder utilizes the task-wise correlation across temporal motion and spatial semantics dimensions to enable precise query-guided localization for MR and refined highlight boundary delineation for HD. Furthermore, we observe the inherent sparsity dilemma within the motion and semantics dimensions of MR/HD datasets. To address this issue, we enrich the corpus from both dimensions by generation strategies and propose contrastive denoising learning to ensure the above components learn robustly and effectively. Extensive experiments on four MR/HD benchmarks demonstrate that our method outperforms existing state-of-the-art models by a margin. Our code is available at https://github.com/snailma0229/MS-DETR.git.
Generative Regression Based Watch Time Prediction for Video Recommendation: Model and Performance
Dec 28, 2024



Watch time prediction (WTP) has emerged as a pivotal task in short video recommendation systems, designed to encapsulate user interests. Predicting users' watch times on videos often encounters challenges, including wide value ranges and imbalanced data distributions, which can lead to significant bias when directly regressing watch time. Recent studies have tried to tackle these issues by converting the continuous watch time estimation into an ordinal classification task. While these methods are somewhat effective, they exhibit notable limitations. Inspired by language modeling, we propose a novel Generative Regression (GR) paradigm for WTP based on sequence generation. This approach employs structural discretization to enable the lossless reconstruction of original values while maintaining prediction fidelity. By formulating the prediction problem as a numerical-to-sequence mapping, and with meticulously designed vocabulary and label encodings, each watch time is transformed into a sequence of tokens. To expedite model training, we introduce the curriculum learning with an embedding mixup strategy which can mitigate training-and-inference inconsistency associated with teacher forcing. We evaluate our method against state-of-the-art approaches on four public datasets and one industrial dataset. We also perform online A/B testing on Kuaishou, a leading video app with about 400 million DAUs, to demonstrate the real-world efficacy of our method. The results conclusively show that GR outperforms existing techniques significantly. Furthermore, we successfully apply GR to another regression task in recommendation systems, i.e., Lifetime Value (LTV) prediction, which highlights its potential as a novel and effective solution to general regression challenges.
TorchSpatial: A Location Encoding Framework and Benchmark for Spatial Representation Learning
Jun 21, 2024Spatial representation learning (SRL) aims at learning general-purpose neural network representations from various types of spatial data (e.g., points, polylines, polygons, networks, images, etc.) in their native formats. Learning good spatial representations is a fundamental problem for various downstream applications such as species distribution modeling, weather forecasting, trajectory generation, geographic question answering, etc. Even though SRL has become the foundation of almost all geospatial artificial intelligence (GeoAI) research, we have not yet seen significant efforts to develop an extensive deep learning framework and benchmark to support SRL model development and evaluation. To fill this gap, we propose TorchSpatial, a learning framework and benchmark for location (point) encoding, which is one of the most fundamental data types of spatial representation learning. TorchSpatial contains three key components: 1) a unified location encoding framework that consolidates 15 commonly recognized location encoders, ensuring scalability and reproducibility of the implementations; 2) the LocBench benchmark tasks encompassing 7 geo-aware image classification and 4 geo-aware image regression datasets; 3) a comprehensive suite of evaluation metrics to quantify geo-aware models' overall performance as well as their geographic bias, with a novel Geo-Bias Score metric. Finally, we provide a detailed analysis and insights into the model performance and geographic bias of different location encoders. We believe TorchSpatial will foster future advancement of spatial representation learning and spatial fairness in GeoAI research. The TorchSpatial model framework, LocBench, and Geo-Bias Score evaluation framework are available at https://github.com/seai-lab/TorchSpatial.
SSIF: Learning Continuous Image Representation for Spatial-Spectral Super-Resolution
Sep 30, 2023



Existing digital sensors capture images at fixed spatial and spectral resolutions (e.g., RGB, multispectral, and hyperspectral images), and each combination requires bespoke machine learning models. Neural Implicit Functions partially overcome the spatial resolution challenge by representing an image in a resolution-independent way. However, they still operate at fixed, pre-defined spectral resolutions. To address this challenge, we propose Spatial-Spectral Implicit Function (SSIF), a neural implicit model that represents an image as a function of both continuous pixel coordinates in the spatial domain and continuous wavelengths in the spectral domain. We empirically demonstrate the effectiveness of SSIF on two challenging spatio-spectral super-resolution benchmarks. We observe that SSIF consistently outperforms state-of-the-art baselines even when the baselines are allowed to train separate models at each spectral resolution. We show that SSIF generalizes well to both unseen spatial resolutions and spectral resolutions. Moreover, SSIF can generate high-resolution images that improve the performance of downstream tasks (e.g., land use classification) by 1.7%-7%.
Learning fast and agile quadrupedal locomotion over complex terrain
Jul 02, 2022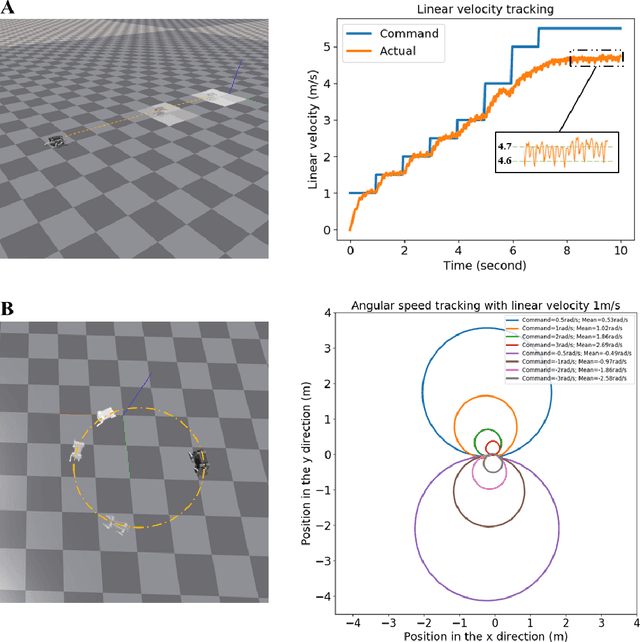
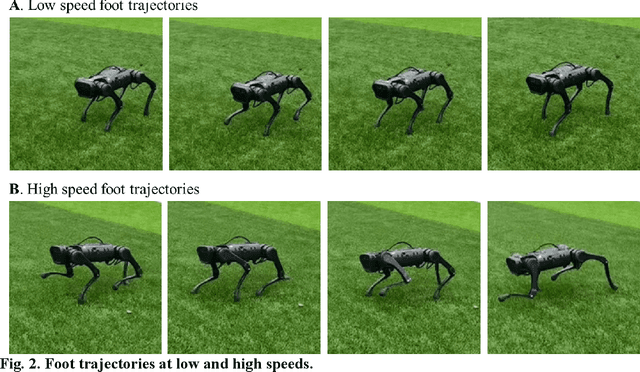
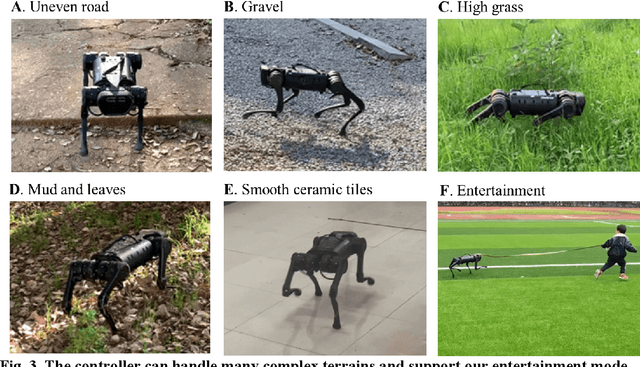
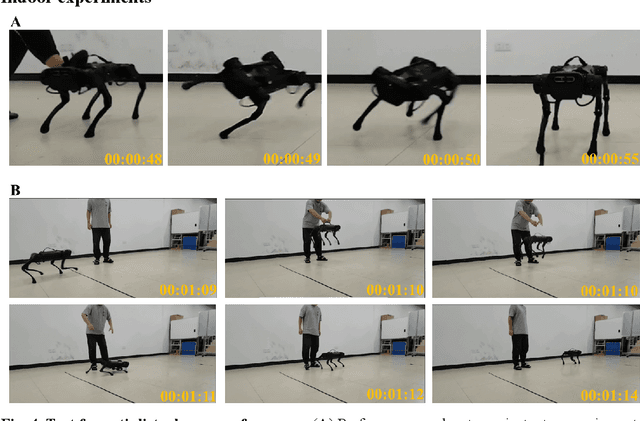
In this paper, we propose a robust controller that achieves natural and stably fast locomotion on a real blind quadruped robot. With only proprioceptive information, the quadruped robot can move at a maximum speed of 10 times its body length, and has the ability to pass through various complex terrains. The controller is trained in the simulation environment by model-free reinforcement learning. In this paper, the proposed loose neighborhood control architecture not only guarantees the learning rate, but also obtains an action network that is easy to transfer to a real quadruped robot. Our research finds that there is a problem of data symmetry loss during training, which leads to unbalanced performance of the learned controller on the left-right symmetric quadruped robot structure, and proposes a mirror-world neural network to solve the performance problem. The learned controller composed of the mirror-world network can make the robot achieve excellent anti-disturbance ability. No specific human knowledge such as a foot trajectory generator are used in the training architecture. The learned controller can coordinate the robot's gait frequency and locomotion speed, and the locomotion pattern is more natural and reasonable than the artificially designed controller. Our controller has excellent anti-disturbance performance, and has good generalization ability to reach locomotion speeds it has never learned and traverse terrains it has never seen before.