 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSimilarity-aware Positive Instance Sampling for Graph Contrastive Pre-training
Jun 23, 2022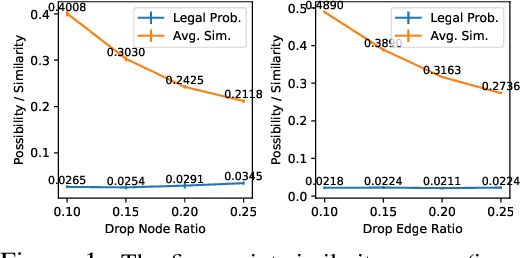
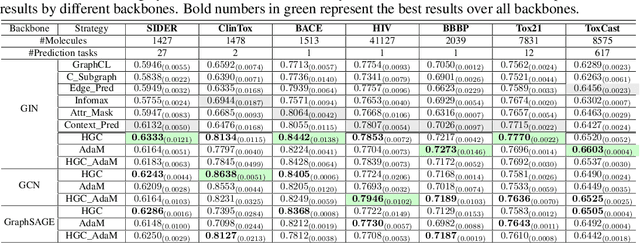

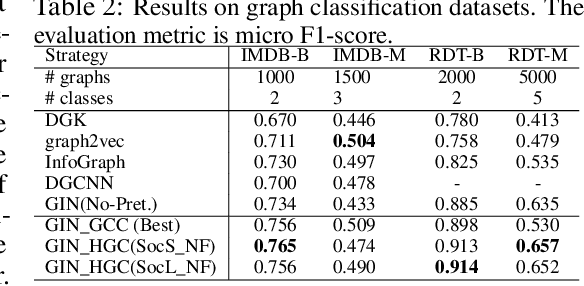
Graph instance contrastive learning has been proved as an effective task for Graph Neural Network (GNN) pre-training. However, one key issue may seriously impede the representative power in existing works: Positive instances created by current methods often miss crucial information of graphs or even yield illegal instances (such as non-chemically-aware graphs in molecular generation). To remedy this issue, we propose to select positive graph instances directly from existing graphs in the training set, which ultimately maintains the legality and similarity to the target graphs. Our selection is based on certain domain-specific pair-wise similarity measurements as well as sampling from a hierarchical graph encoding similarity relations among graphs. Besides, we develop an adaptive node-level pre-training method to dynamically mask nodes to distribute them evenly in the graph. We conduct extensive experiments on $13$ graph classification and node classification benchmark datasets from various domains. The results demonstrate that the GNN models pre-trained by our strategies can outperform those trained-from-scratch models as well as the variants obtained by existing methods.
SNAKE: Shape-aware Neural 3D Keypoint Field
Jun 03, 2022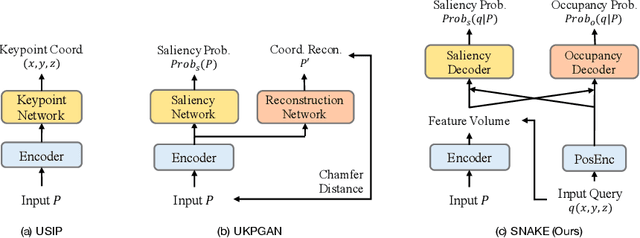
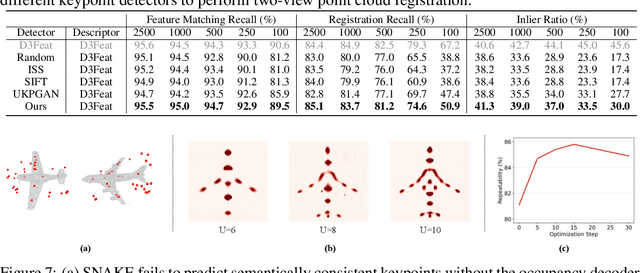
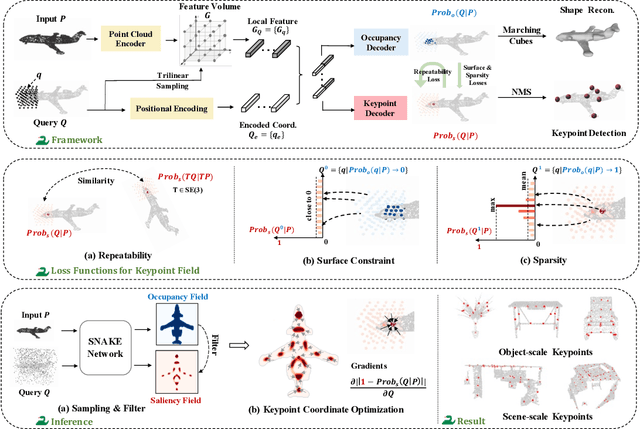
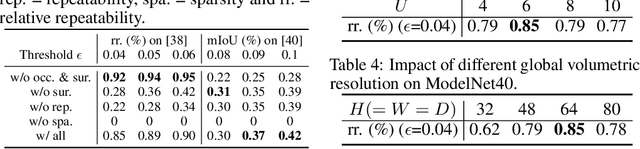
Detecting 3D keypoints from point clouds is important for shape reconstruction, while this work investigates the dual question: can shape reconstruction benefit 3D keypoint detection? Existing methods either seek salient features according to statistics of different orders or learn to predict keypoints that are invariant to transformation. Nevertheless, the idea of incorporating shape reconstruction into 3D keypoint detection is under-explored. We argue that this is restricted by former problem formulations. To this end, a novel unsupervised paradigm named SNAKE is proposed, which is short for shape-aware neural 3D keypoint field. Similar to recent coordinate-based radiance or distance field, our network takes 3D coordinates as inputs and predicts implicit shape indicators and keypoint saliency simultaneously, thus naturally entangling 3D keypoint detection and shape reconstruction. We achieve superior performance on various public benchmarks, including standalone object datasets ModelNet40, KeypointNet, SMPL meshes and scene-level datasets 3DMatch and Redwood. Intrinsic shape awareness brings several advantages as follows. (1) SNAKE generates 3D keypoints consistent with human semantic annotation, even without such supervision. (2) SNAKE outperforms counterparts in terms of repeatability, especially when the input point clouds are down-sampled. (3) the generated keypoints allow accurate geometric registration, notably in a zero-shot setting. Codes are available at https://github.com/zhongcl-thu/SNAKE
Multimodal Token Fusion for Vision Transformers
Apr 19, 2022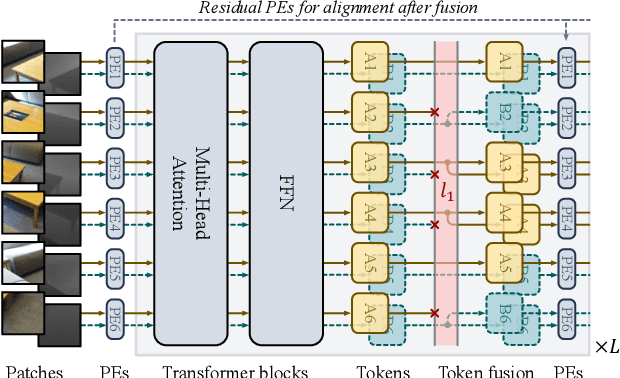
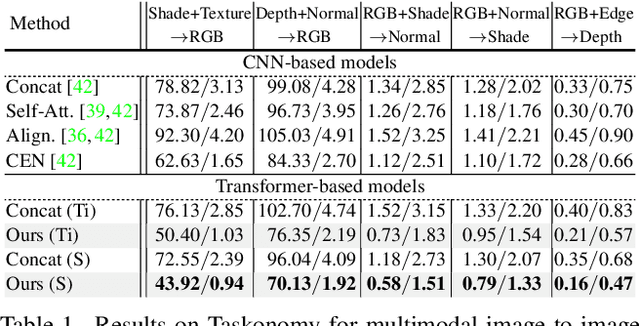
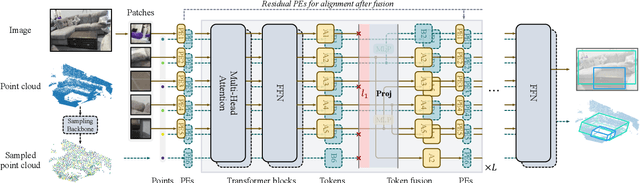
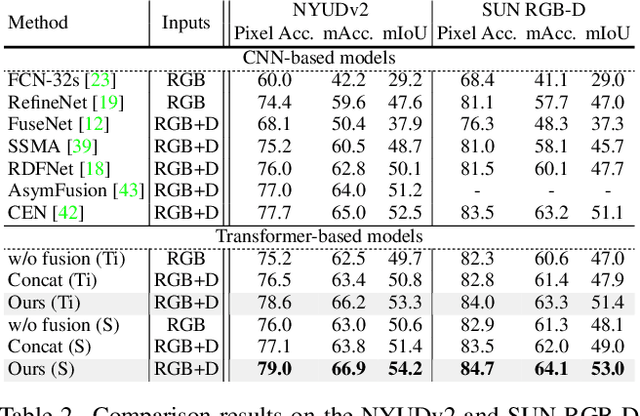
Many adaptations of transformers have emerged to address the single-modal vision tasks, where self-attention modules are stacked to handle input sources like images. Intuitively, feeding multiple modalities of data to vision transformers could improve the performance, yet the inner-modal attentive weights may also be diluted, which could thus undermine the final performance. In this paper, we propose a multimodal token fusion method (TokenFusion), tailored for transformer-based vision tasks. To effectively fuse multiple modalities, TokenFusion dynamically detects uninformative tokens and substitutes these tokens with projected and aggregated inter-modal features. Residual positional alignment is also adopted to enable explicit utilization of the inter-modal alignments after fusion. The design of TokenFusion allows the transformer to learn correlations among multimodal features, while the single-modal transformer architecture remains largely intact. Extensive experiments are conducted on a variety of homogeneous and heterogeneous modalities and demonstrate that TokenFusion surpasses state-of-the-art methods in three typical vision tasks: multimodal image-to-image translation, RGB-depth semantic segmentation, and 3D object detection with point cloud and images.
Adversarial Texture for Fooling Person Detectors in the Physical World
Mar 18, 2022
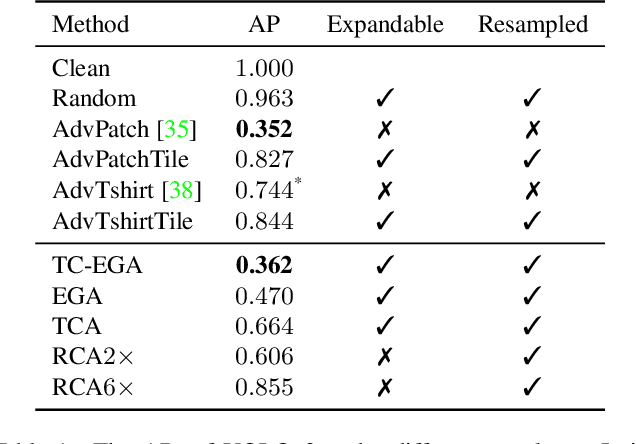
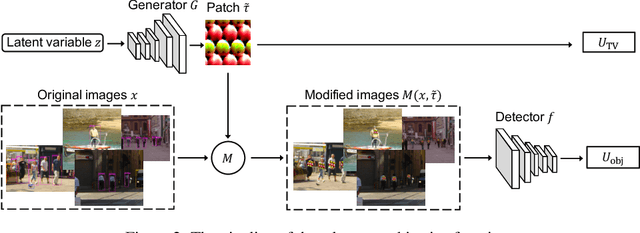

Nowadays, cameras equipped with AI systems can capture and analyze images to detect people automatically. However, the AI system can make mistakes when receiving deliberately designed patterns in the real world, i.e., physical adversarial examples. Prior works have shown that it is possible to print adversarial patches on clothes to evade DNN-based person detectors. However, these adversarial examples could have catastrophic drops in the attack success rate when the viewing angle (i.e., the camera's angle towards the object) changes. To perform a multi-angle attack, we propose Adversarial Texture (AdvTexture). AdvTexture can cover clothes with arbitrary shapes so that people wearing such clothes can hide from person detectors from different viewing angles. We propose a generative method, named Toroidal-Cropping-based Expandable Generative Attack (TC-EGA), to craft AdvTexture with repetitive structures. We printed several pieces of cloth with AdvTexure and then made T-shirts, skirts, and dresses in the physical world. Experiments showed that these clothes could fool person detectors in the physical world.
Smoothing Matters: Momentum Transformer for Domain Adaptive Semantic Segmentation
Mar 15, 2022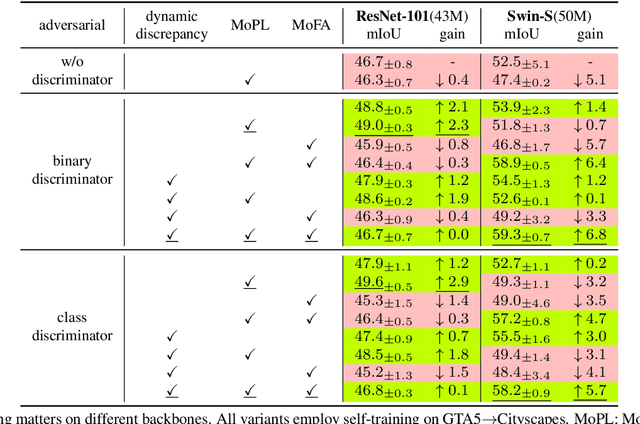
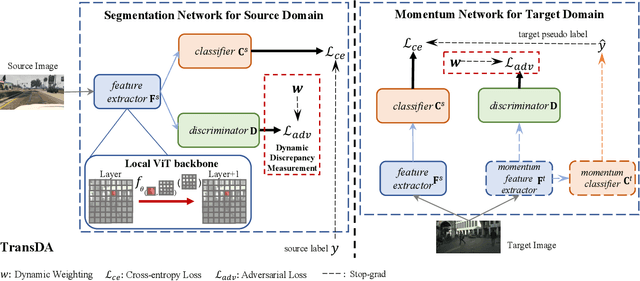

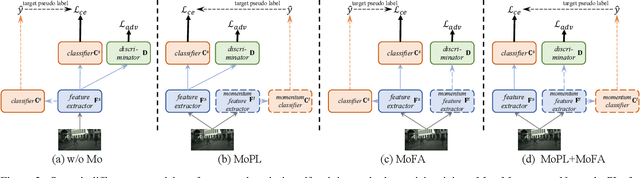
After the great success of Vision Transformer variants (ViTs) in computer vision, it has also demonstrated great potential in domain adaptive semantic segmentation. Unfortunately, straightforwardly applying local ViTs in domain adaptive semantic segmentation does not bring in expected improvement. We find that the pitfall of local ViTs is due to the severe high-frequency components generated during both the pseudo-label construction and features alignment for target domains. These high-frequency components make the training of local ViTs very unsmooth and hurt their transferability. In this paper, we introduce a low-pass filtering mechanism, momentum network, to smooth the learning dynamics of target domain features and pseudo labels. Furthermore, we propose a dynamic of discrepancy measurement to align the distributions in the source and target domains via dynamic weights to evaluate the importance of the samples. After tackling the above issues, extensive experiments on sim2real benchmarks show that the proposed method outperforms the state-of-the-art methods. Our codes are available at https://github.com/alpc91/TransDA
Equivariant Graph Mechanics Networks with Constraints
Mar 12, 2022
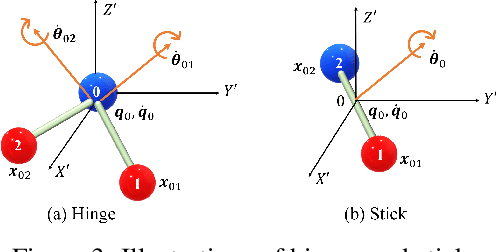
Learning to reason about relations and dynamics over multiple interacting objects is a challenging topic in machine learning. The challenges mainly stem from that the interacting systems are exponentially-compositional, symmetrical, and commonly geometrically-constrained. Current methods, particularly the ones based on equivariant Graph Neural Networks (GNNs), have targeted on the first two challenges but remain immature for constrained systems. In this paper, we propose Graph Mechanics Network (GMN) which is combinatorially efficient, equivariant and constraint-aware. The core of GMN is that it represents, by generalized coordinates, the forward kinematics information (positions and velocities) of a structural object. In this manner, the geometrical constraints are implicitly and naturally encoded in the forward kinematics. Moreover, to allow equivariant message passing in GMN, we have developed a general form of orthogonality-equivariant functions, given that the dynamics of constrained systems are more complicated than the unconstrained counterparts. Theoretically, the proposed equivariant formulation is proved to be universally expressive under certain conditions. Extensive experiments support the advantages of GMN compared to the state-of-the-art GNNs in terms of prediction accuracy, constraint satisfaction and data efficiency on the simulated systems consisting of particles, sticks and hinges, as well as two real-world datasets for molecular dynamics prediction and human motion capture.
Hybrid Robotic Grasping with a Soft Multimodal Gripper and a Deep Multistage Learning Scheme
Feb 28, 2022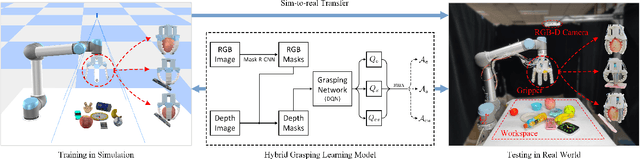
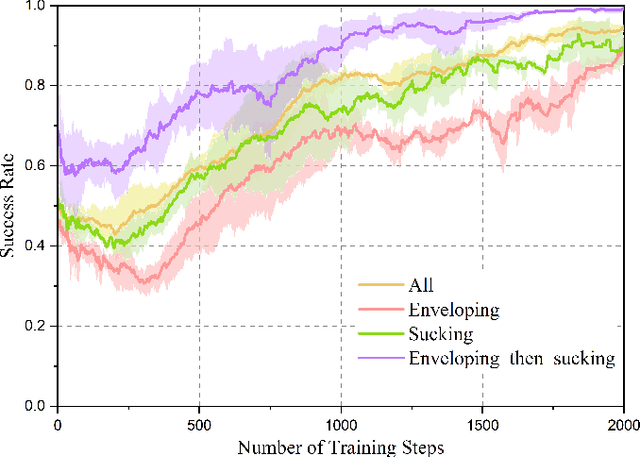
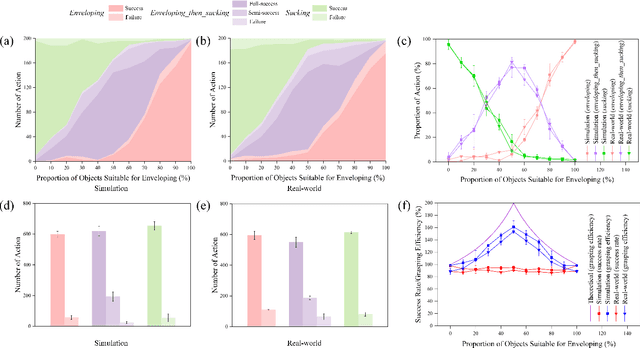
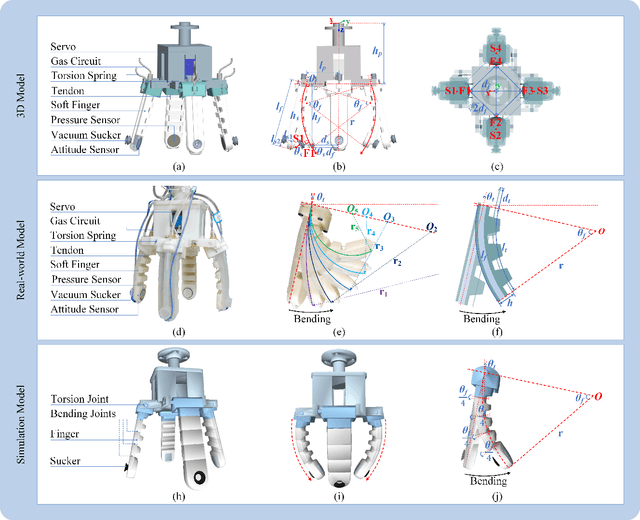
Grasping has long been considered an important and practical task in robotic manipulation. Yet achieving robust and efficient grasps of diverse objects is challenging, since it involves gripper design, perception, control and learning, etc. Recent learning-based approaches have shown excellent performance in grasping a variety of novel objects. However, these methods either are typically limited to one single grasping mode, or else more end effectors are needed to grasp various objects. In addition, gripper design and learning methods are commonly developed separately, which may not adequately explore the ability of a multimodal gripper. In this paper, we present a deep reinforcement learning (DRL) framework to achieve multistage hybrid robotic grasping with a new soft multimodal gripper. A soft gripper with three grasping modes (i.e., \textit{enveloping}, \textit{sucking}, and \textit{enveloping\_then\_sucking}) can both deal with objects of different shapes and grasp more than one object simultaneously. We propose a novel hybrid grasping method integrated with the multimodal gripper to optimize the number of grasping actions. We evaluate the DRL framework under different scenarios (i.e., with different ratios of objects of two grasp types). The proposed algorithm is shown to reduce the number of grasping actions (i.e., enlarge the grasping efficiency, with maximum values of 161\% in simulations and 154\% in real-world experiments) compared to single grasping modes.
Sound Adversarial Audio-Visual Navigation
Feb 22, 2022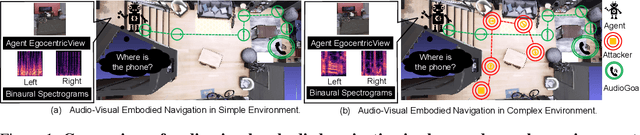
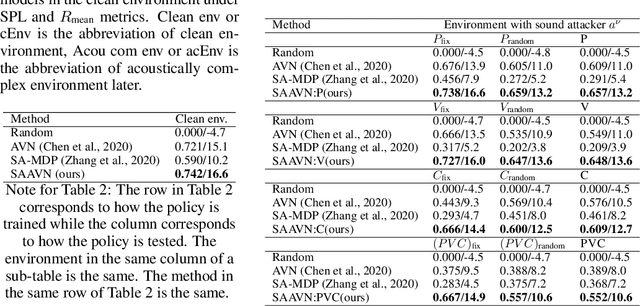
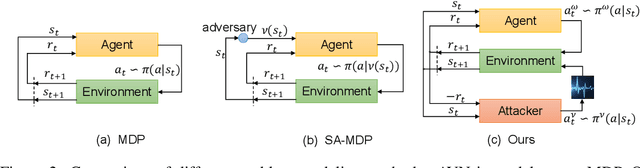
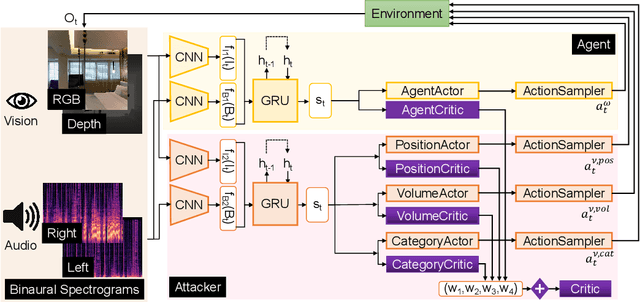
Audio-visual navigation task requires an agent to find a sound source in a realistic, unmapped 3D environment by utilizing egocentric audio-visual observations. Existing audio-visual navigation works assume a clean environment that solely contains the target sound, which, however, would not be suitable in most real-world applications due to the unexpected sound noise or intentional interference. In this work, we design an acoustically complex environment in which, besides the target sound, there exists a sound attacker playing a zero-sum game with the agent. More specifically, the attacker can move and change the volume and category of the sound to make the agent suffer from finding the sounding object while the agent tries to dodge the attack and navigate to the goal under the intervention. Under certain constraints to the attacker, we can improve the robustness of the agent towards unexpected sound attacks in audio-visual navigation. For better convergence, we develop a joint training mechanism by employing the property of a centralized critic with decentralized actors. Experiments on two real-world 3D scan datasets, Replica, and Matterport3D, verify the effectiveness and the robustness of the agent trained under our designed environment when transferred to the clean environment or the one containing sound attackers with random policy. Project: \url{https://yyf17.github.io/SAAVN}.
Equivariant Graph Hierarchy-Based Neural Networks
Feb 22, 2022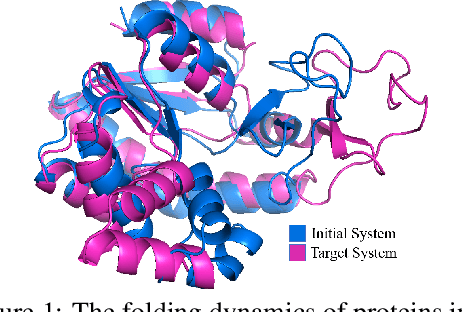
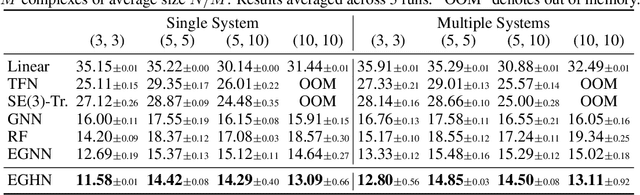
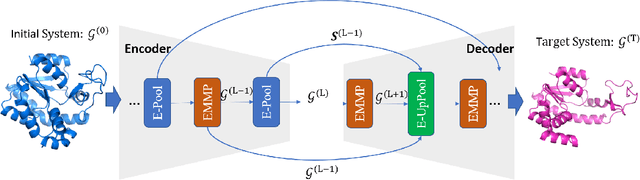
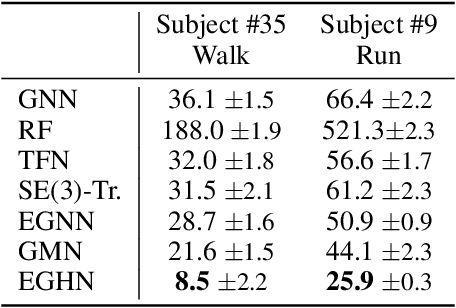
Equivariant Graph neural Networks (EGNs) are powerful in characterizing the dynamics of multi-body physical systems. Existing EGNs conduct flat message passing, which, yet, is unable to capture the spatial/dynamical hierarchy for complex systems particularly, limiting substructure discovery and global information fusion. In this paper, we propose Equivariant Hierarchy-based Graph Networks (EGHNs) which consist of the three key components: generalized Equivariant Matrix Message Passing (EMMP) , E-Pool and E-UpPool. In particular, EMMP is able to improve the expressivity of conventional equivariant message passing, E-Pool assigns the quantities of the low-level nodes into high-level clusters, while E-UpPool leverages the high-level information to update the dynamics of the low-level nodes. As their names imply, both E-Pool and E-UpPool are guaranteed to be equivariant to meet physic symmetry. Considerable experimental evaluations verify the effectiveness of our EGHN on several applications including multi-object dynamics simulation, motion capture, and protein dynamics modeling.
Sim2Real Object-Centric Keypoint Detection and Description
Feb 03, 2022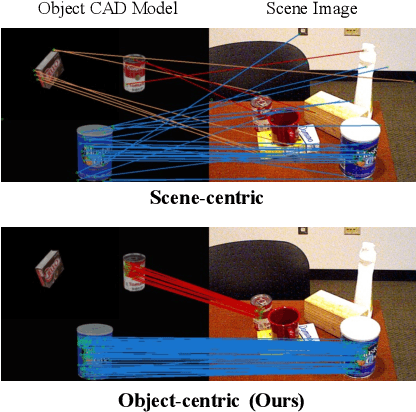

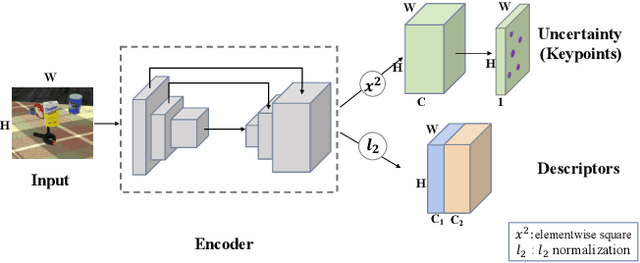
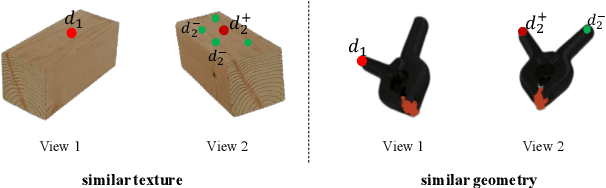
Keypoint detection and description play a central role in computer vision. Most existing methods are in the form of scene-level prediction, without returning the object classes of different keypoints. In this paper, we propose the object-centric formulation, which, beyond the conventional setting, requires further identifying which object each interest point belongs to. With such fine-grained information, our framework enables more downstream potentials, such as object-level matching and pose estimation in a clustered environment. To get around the difficulty of label collection in the real world, we develop a sim2real contrastive learning mechanism that can generalize the model trained in simulation to real-world applications. The novelties of our training method are three-fold: (i) we integrate the uncertainty into the learning framework to improve feature description of hard cases, e.g., less-textured or symmetric patches; (ii) we decouple the object descriptor into two output branches -- intra-object salience and inter-object distinctness, resulting in a better pixel-wise description; (iii) we enforce cross-view semantic consistency for enhanced robustness in representation learning. Comprehensive experiments on image matching and 6D pose estimation verify the encouraging generalization ability of our method from simulation to reality. Particularly for 6D pose estimation, our method significantly outperforms typical unsupervised/sim2real methods, achieving a closer gap with the fully supervised counterpart. Additional results and videos can be found at https://zhongcl-thu.github.io/rock/