 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning to Repair Lean Proofs from Compiler Feedback
Feb 03, 2026As neural theorem provers become increasingly agentic, the ability to interpret and act on compiler feedback is critical. However, existing Lean datasets consist almost exclusively of correct proofs, offering little supervision for understanding and repairing failures. We study Lean proof repair as a supervised learning problem: given an erroneous proof and compiler feedback, predict both a corrected proof and a natural-language diagnosis grounded in the same feedback. We introduce APRIL (Automated Proof Repair in Lean), a dataset of 260,000 supervised tuples pairing systematically generated proof failures with compiler diagnostics and aligned repair and explanation targets. Training language models on APRIL substantially improves repair accuracy and feedback-conditioned reasoning; in our single-shot repair evaluation setting, a finetuned 4B-parameter model outperforms the strongest open-source baseline. We view diagnostic-conditioned supervision as a complementary training signal for feedback-using provers. Our dataset is available at \href{https://huggingface.co/datasets/uw-math-ai/APRIL}{this link}.
SweRank+: Multilingual, Multi-Turn Code Ranking for Software Issue Localization
Dec 23, 2025Maintaining large-scale, multilingual codebases hinges on accurately localizing issues, which requires mapping natural-language error descriptions to the relevant functions that need to be modified. However, existing ranking approaches are often Python-centric and perform a single-pass search over the codebase. This work introduces SweRank+, a framework that couples SweRankMulti, a cross-lingual code ranking tool, with SweRankAgent, an agentic search setup, for iterative, multi-turn reasoning over the code repository. SweRankMulti comprises a code embedding retriever and a listwise LLM reranker, and is trained using a carefully curated large-scale issue localization dataset spanning multiple popular programming languages. SweRankAgent adopts an agentic search loop that moves beyond single-shot localization with a memory buffer to reason and accumulate relevant localization candidates over multiple turns. Our experiments on issue localization benchmarks spanning various languages demonstrate new state-of-the-art performance with SweRankMulti, while SweRankAgent further improves localization over single-pass ranking.
One-Topic-Doesn't-Fit-All: Transcreating Reading Comprehension Test for Personalized Learning
Nov 12, 2025


Personalized learning has gained attention in English as a Foreign Language (EFL) education, where engagement and motivation play crucial roles in reading comprehension. We propose a novel approach to generating personalized English reading comprehension tests tailored to students' interests. We develop a structured content transcreation pipeline using OpenAI's gpt-4o, where we start with the RACE-C dataset, and generate new passages and multiple-choice reading comprehension questions that are linguistically similar to the original passages but semantically aligned with individual learners' interests. Our methodology integrates topic extraction, question classification based on Bloom's taxonomy, linguistic feature analysis, and content transcreation to enhance student engagement. We conduct a controlled experiment with EFL learners in South Korea to examine the impact of interest-aligned reading materials on comprehension and motivation. Our results show students learning with personalized reading passages demonstrate improved comprehension and motivation retention compared to those learning with non-personalized materials.
Estimating Dimensionality of Neural Representations from Finite Samples
Sep 30, 2025



The global dimensionality of a neural representation manifold provides rich insight into the computational process underlying both artificial and biological neural networks. However, all existing measures of global dimensionality are sensitive to the number of samples, i.e., the number of rows and columns of the sample matrix. We show that, in particular, the participation ratio of eigenvalues, a popular measure of global dimensionality, is highly biased with small sample sizes, and propose a bias-corrected estimator that is more accurate with finite samples and with noise. On synthetic data examples, we demonstrate that our estimator can recover the true known dimensionality. We apply our estimator to neural brain recordings, including calcium imaging, electrophysiological recordings, and fMRI data, and to the neural activations in a large language model and show our estimator is invariant to the sample size. Finally, our estimators can additionally be used to measure the local dimensionalities of curved neural manifolds by weighting the finite samples appropriately.
ThematicPlane: Bridging Tacit User Intent and Latent Spaces for Image Generation
Aug 08, 2025
Generative AI has made image creation more accessible, yet aligning outputs with nuanced creative intent remains challenging, particularly for non-experts. Existing tools often require users to externalize ideas through prompts or references, limiting fluid exploration. We introduce ThematicPlane, a system that enables users to navigate and manipulate high-level semantic concepts (e.g., mood, style, or narrative tone) within an interactive thematic design plane. This interface bridges the gap between tacit creative intent and system control. In our exploratory study (N=6), participants engaged in divergent and convergent creative modes, often embracing unexpected results as inspiration or iteration cues. While they grounded their exploration in familiar themes, differing expectations of how themes mapped to outputs revealed a need for more explainable controls. Overall, ThematicPlane fosters expressive, iterative workflows and highlights new directions for intuitive, semantics-driven interaction in generative design tools.
PosterMate: Audience-driven Collaborative Persona Agents for Poster Design
Jul 24, 2025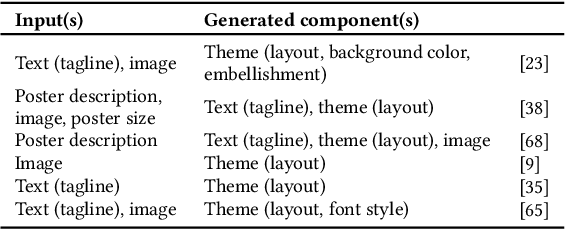
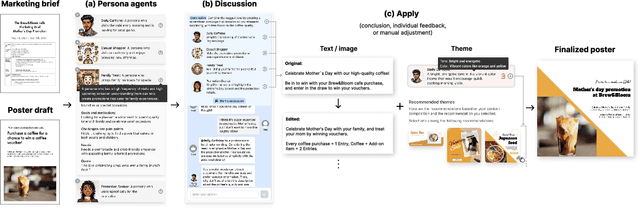
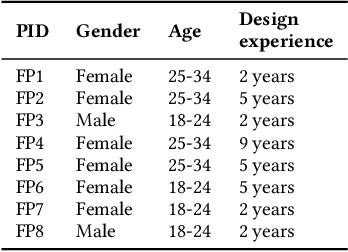
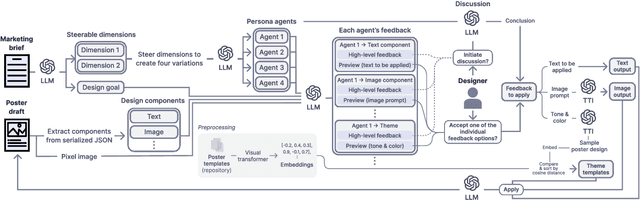
Poster designing can benefit from synchronous feedback from target audiences. However, gathering audiences with diverse perspectives and reconciling them on design edits can be challenging. Recent generative AI models present opportunities to simulate human-like interactions, but it is unclear how they may be used for feedback processes in design. We introduce PosterMate, a poster design assistant that facilitates collaboration by creating audience-driven persona agents constructed from marketing documents. PosterMate gathers feedback from each persona agent regarding poster components, and stimulates discussion with the help of a moderator to reach a conclusion. These agreed-upon edits can then be directly integrated into the poster design. Through our user study (N=12), we identified the potential of PosterMate to capture overlooked viewpoints, while serving as an effective prototyping tool. Additionally, our controlled online evaluation (N=100) revealed that the feedback from an individual persona agent is appropriate given its persona identity, and the discussion effectively synthesizes the different persona agents' perspectives.
Team ACK at SemEval-2025 Task 2: Beyond Word-for-Word Machine Translation for English-Korean Pairs
Apr 29, 2025Translating knowledge-intensive and entity-rich text between English and Korean requires transcreation to preserve language-specific and cultural nuances beyond literal, phonetic or word-for-word conversion. We evaluate 13 models (LLMs and MT models) using automatic metrics and human assessment by bilingual annotators. Our findings show LLMs outperform traditional MT systems but struggle with entity translation requiring cultural adaptation. By constructing an error taxonomy, we identify incorrect responses and entity name errors as key issues, with performance varying by entity type and popularity level. This work exposes gaps in automatic evaluation metrics and hope to enable future work in completing culturally-nuanced machine translation.
Semantic Commit: Helping Users Update Intent Specifications for AI Memory at Scale
Apr 12, 2025How do we update AI memory of user intent as intent changes? We consider how an AI interface may assist the integration of new information into a repository of natural language data. Inspired by software engineering concepts like impact analysis, we develop methods and a UI for managing semantic changes with non-local effects, which we call "semantic conflict resolution." The user commits new intent to a project -- makes a "semantic commit" -- and the AI helps the user detect and resolve semantic conflicts within a store of existing information representing their intent (an "intent specification"). We develop an interface, SemanticCommit, to better understand how users resolve conflicts when updating intent specifications such as Cursor Rules and game design documents. A knowledge graph-based RAG pipeline drives conflict detection, while LLMs assist in suggesting resolutions. We evaluate our technique on an initial benchmark. Then, we report a 12 user within-subjects study of SemanticCommit for two task domains -- game design documents, and AI agent memory in the style of ChatGPT memories -- where users integrated new information into an existing list. Half of our participants adopted a workflow of impact analysis, where they would first flag conflicts without AI revisions then resolve conflicts locally, despite having access to a global revision feature. We argue that AI agent interfaces, such as software IDEs like Cursor and Windsurf, should provide affordances for impact analysis and help users validate AI retrieval independently from generation. Our work speaks to how AI agent designers should think about updating memory as a process that involves human feedback and decision-making.
Evaluation and Incident Prevention in an Enterprise AI Assistant
Apr 11, 2025



Enterprise AI Assistants are increasingly deployed in domains where accuracy is paramount, making each erroneous output a potentially significant incident. This paper presents a comprehensive framework for monitoring, benchmarking, and continuously improving such complex, multi-component systems under active development by multiple teams. Our approach encompasses three key elements: (1) a hierarchical ``severity'' framework for incident detection that identifies and categorizes errors while attributing component-specific error rates, facilitating targeted improvements; (2) a scalable and principled methodology for benchmark construction, evaluation, and deployment, designed to accommodate multiple development teams, mitigate overfitting risks, and assess the downstream impact of system modifications; and (3) a continual improvement strategy leveraging multidimensional evaluation, enabling the identification and implementation of diverse enhancement opportunities. By adopting this holistic framework, organizations can systematically enhance the reliability and performance of their AI Assistants, ensuring their efficacy in critical enterprise environments. We conclude by discussing how this multifaceted evaluation approach opens avenues for various classes of enhancements, paving the way for more robust and trustworthy AI systems.
Kanana: Compute-efficient Bilingual Language Models
Feb 26, 2025



We introduce Kanana, a series of bilingual language models that demonstrate exceeding performance in Korean and competitive performance in English. The computational cost of Kanana is significantly lower than that of state-of-the-art models of similar size. The report details the techniques employed during pre-training to achieve compute-efficient yet competitive models, including high quality data filtering, staged pre-training, depth up-scaling, and pruning and distillation. Furthermore, the report outlines the methodologies utilized during the post-training of the Kanana models, encompassing supervised fine-tuning and preference optimization, aimed at enhancing their capability for seamless interaction with users. Lastly, the report elaborates on plausible approaches used for language model adaptation to specific scenarios, such as embedding, retrieval augmented generation, and function calling. The Kanana model series spans from 2.1B to 32.5B parameters with 2.1B models (base, instruct, embedding) publicly released to promote research on Korean language models.