 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDense and Aligned Captions (DAC) Promote Compositional Reasoning in VL Models
Jun 01, 2023



Vision and Language (VL) models offer an effective method for aligning representation spaces of images and text, leading to numerous applications such as cross-modal retrieval, visual question answering, captioning, and more. However, the aligned image-text spaces learned by all the popular VL models are still suffering from the so-called `object bias' - their representations behave as `bags of nouns', mostly ignoring or downsizing the attributes, relations, and states of objects described/appearing in texts/images. Although some great attempts at fixing these `compositional reasoning' issues were proposed in the recent literature, the problem is still far from being solved. In this paper, we uncover two factors limiting the VL models' compositional reasoning performance. These two factors are properties of the paired VL dataset used for finetuning and pre-training the VL model: (i) the caption quality, or in other words `image-alignment', of the texts; and (ii) the `density' of the captions in the sense of mentioning all the details appearing on the image. We propose a fine-tuning approach for automatically treating these factors leveraging a standard VL dataset (CC3M). Applied to CLIP, we demonstrate its significant compositional reasoning performance increase of up to $\sim27\%$ over the base model, up to $\sim20\%$ over the strongest baseline, and by $6.7\%$ on average.
Incorporating Structured Representations into Pretrained Vision & Language Models Using Scene Graphs
May 10, 2023



Vision and Language (VL) models have demonstrated remarkable zero-shot performance in a variety of tasks. However, recent studies have shown that even the best VL models struggle to capture aspects of scene understanding, such as object attributes, relationships, and action states. In contrast, obtaining structured annotations, e.g., scene graphs (SGs) that could improve these models is time-consuming, costly, and tedious, and thus cannot be used on a large scale. Here we ask, can small datasets containing SG annotations provide sufficient information for enhancing structured understanding of VL models? We show that it is indeed possible to improve VL models using such data by utilizing a specialized model architecture and a new training paradigm. Our approach captures structure-related information for both the visual and textual encoders by directly supervising both components when learning from SG labels. We use scene graph supervision to generate fine-grained captions based on various graph augmentations highlighting different compositional aspects of the scene, and to predict SG information using an open vocabulary approach by adding special ``Adaptive SG tokens'' to the visual encoder. Moreover, we design a new adaptation technique tailored specifically to the SG tokens that allows better learning of the graph prediction task while still maintaining zero-shot capabilities. Our model shows strong performance improvements on the Winoground and VL-checklist datasets with only a mild degradation in zero-shot performance.
PromptonomyViT: Multi-Task Prompt Learning Improves Video Transformers using Synthetic Scene Data
Dec 08, 2022



Action recognition models have achieved impressive results by incorporating scene-level annotations, such as objects, their relations, 3D structure, and more. However, obtaining annotations of scene structure for videos requires a significant amount of effort to gather and annotate, making these methods expensive to train. In contrast, synthetic datasets generated by graphics engines provide powerful alternatives for generating scene-level annotations across multiple tasks. In this work, we propose an approach to leverage synthetic scene data for improving video understanding. We present a multi-task prompt learning approach for video transformers, where a shared video transformer backbone is enhanced by a small set of specialized parameters for each task. Specifically, we add a set of ``task prompts'', each corresponding to a different task, and let each prompt predict task-related annotations. This design allows the model to capture information shared among synthetic scene tasks as well as information shared between synthetic scene tasks and a real video downstream task throughout the entire network. We refer to this approach as ``Promptonomy'', since the prompts model a task-related structure. We propose the PromptonomyViT model (PViT), a video transformer that incorporates various types of scene-level information from synthetic data using the ``Promptonomy'' approach. PViT shows strong performance improvements on multiple video understanding tasks and datasets.
MAEDAY: MAE for few and zero shot AnomalY-Detection
Nov 25, 2022



The goal of Anomaly-Detection (AD) is to identify outliers, or outlying regions, from some unknown distribution given only a set of positive (good) examples. Few-Shot AD (FSAD) aims to solve the same task with a minimal amount of normal examples. Recent embedding-based methods, that compare the embedding vectors of queries to a set of reference embeddings, have demonstrated impressive results for FSAD, where as little as one good example is provided. A different approach, image-reconstruction-based, has been historically used for AD. The idea is to train a model to recover normal images from corrupted observations, assuming that the model will fail to recover regions when encountered with an out-of-distribution image. However, image-reconstruction-based methods were not yet used in the low-shot regime as they need to be trained on a diverse set of normal images in order to properly perform. We suggest using Masked Auto-Encoder (MAE), a self-supervised transformer model trained for recovering missing image regions based on their surroundings for FSAD. We show that MAE performs well by pre-training on an arbitrary set of natural images (ImageNet) and only fine-tuning on a small set of normal images. We name this method MAEDAY. We further find that MAEDAY provides an orthogonal signal to the embedding-based methods and the ensemble of the two approaches achieves very strong SOTA results. We also present a novel task of Zero-Shot AD (ZSAD) where no normal samples are available at training time. We show that MAEDAY performs surprisingly well at this task. Finally, we provide a new dataset for detecting foreign objects on the ground and demonstrate superior results for this task as well. Code is available at https://github.com/EliSchwartz/MAEDAY .
CODA-Prompt: COntinual Decomposed Attention-based Prompting for Rehearsal-Free Continual Learning
Nov 23, 2022



Computer vision models suffer from a phenomenon known as catastrophic forgetting when learning novel concepts from continuously shifting training data. Typical solutions for this continual learning problem require extensive rehearsal of previously seen data, which increases memory costs and may violate data privacy. Recently, the emergence of large-scale pre-trained vision transformer models has enabled prompting approaches as an alternative to data-rehearsal. These approaches rely on a key-query mechanism to generate prompts and have been found to be highly resistant to catastrophic forgetting in the well-established rehearsal-free continual learning setting. However, the key mechanism of these methods is not trained end-to-end with the task sequence. Our experiments show that this leads to a reduction in their plasticity, hence sacrificing new task accuracy, and inability to benefit from expanded parameter capacity. We instead propose to learn a set of prompt components which are assembled with input-conditioned weights to produce input-conditioned prompts, resulting in a novel attention-based end-to-end key-query scheme. Our experiments show that we outperform the current SOTA method DualPrompt on established benchmarks by as much as 5.4% in average accuracy. We also outperform the state of art by as much as 6.6% accuracy on a continual learning benchmark which contains both class-incremental and domain-incremental task shifts, corresponding to many practical settings.
Teaching Structured Vision&Language Concepts to Vision&Language Models
Nov 21, 2022



Vision and Language (VL) models have demonstrated remarkable zero-shot performance in a variety of tasks. However, some aspects of complex language understanding still remain a challenge. We introduce the collective notion of Structured Vision&Language Concepts (SVLC) which includes object attributes, relations, and states which are present in the text and visible in the image. Recent studies have shown that even the best VL models struggle with SVLC. A possible way of fixing this issue is by collecting dedicated datasets for teaching each SVLC type, yet this might be expensive and time-consuming. Instead, we propose a more elegant data-driven approach for enhancing VL models' understanding of SVLCs that makes more effective use of existing VL pre-training datasets and does not require any additional data. While automatic understanding of image structure still remains largely unsolved, language structure is much better modeled and understood, allowing for its effective utilization in teaching VL models. In this paper, we propose various techniques based on language structure understanding that can be used to manipulate the textual part of off-the-shelf paired VL datasets. VL models trained with the updated data exhibit a significant improvement of up to 15% in their SVLC understanding with only a mild degradation in their zero-shot capabilities both when training from scratch or fine-tuning a pre-trained model.
ConStruct-VL: Data-Free Continual Structured VL Concepts Learning
Nov 17, 2022



Recently, large-scale pre-trained Vision-and-Language (VL) foundation models have demonstrated remarkable capabilities in many zero-shot downstream tasks, achieving competitive results for recognizing objects defined by as little as short text prompts. However, it has also been shown that VL models are still brittle in Structured VL Concept (SVLC) reasoning, such as the ability to recognize object attributes, states, and inter-object relations. This leads to reasoning mistakes, which need to be corrected as they occur by teaching VL models the missing SVLC skills; often this must be done using private data where the issue was found, which naturally leads to a data-free continual (no task-id) VL learning setting. In this work, we introduce the first Continual Data-Free Structured VL Concepts Learning (ConStruct-VL) benchmark and show it is challenging for many existing data-free CL strategies. We, therefore, propose a data-free method comprised of a new approach of Adversarial Pseudo-Replay (APR) which generates adversarial reminders of past tasks from past task models. To use this method efficiently, we also propose a continual parameter-efficient Layered-LoRA (LaLo) neural architecture allowing no-memory-cost access to all past models at train time. We show this approach outperforms all data-free methods by as much as ~7% while even matching some levels of experience-replay (prohibitive for applications where data-privacy must be preserved).
FETA: Towards Specializing Foundation Models for Expert Task Applications
Sep 08, 2022
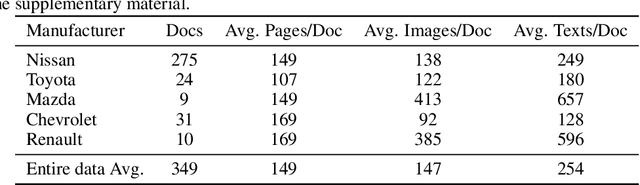
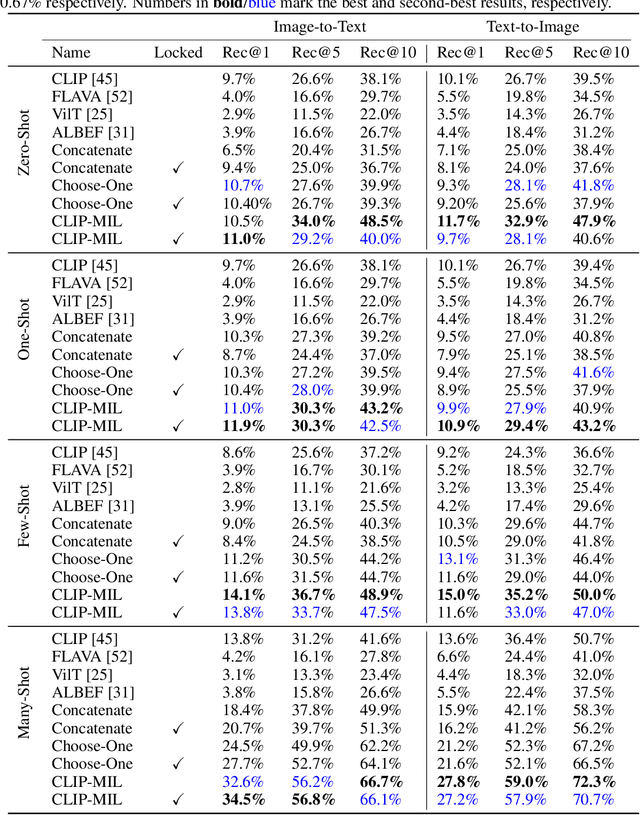
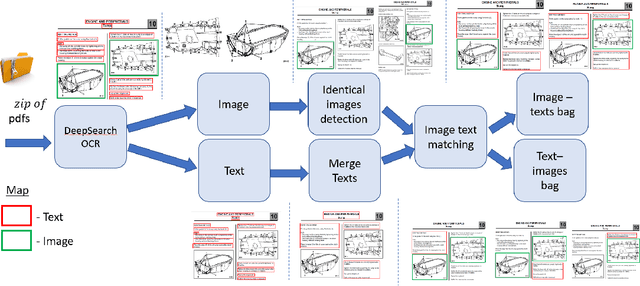
Foundation Models (FMs) have demonstrated unprecedented capabilities including zero-shot learning, high fidelity data synthesis, and out of domain generalization. However, as we show in this paper, FMs still have poor out-of-the-box performance on expert tasks (e.g. retrieval of car manuals technical illustrations from language queries), data for which is either unseen or belonging to a long-tail part of the data distribution of the huge datasets used for FM pre-training. This underlines the necessity to explicitly evaluate and finetune FMs on such expert tasks, arguably ones that appear the most in practical real-world applications. In this paper, we propose a first of its kind FETA benchmark built around the task of teaching FMs to understand technical documentation, via learning to match their graphical illustrations to corresponding language descriptions. Our FETA benchmark focuses on text-to-image and image-to-text retrieval in public car manuals and sales catalogue brochures. FETA is equipped with a procedure for completely automatic annotation extraction (code would be released upon acceptance), allowing easy extension of FETA to more documentation types and application domains in the future. Our automatic annotation leads to an automated performance metric shown to be consistent with metrics computed on human-curated annotations (also released). We provide multiple baselines and analysis of popular FMs on FETA leading to several interesting findings that we believe would be very valuable to the FM community, paving the way towards real-world application of FMs for practical expert tasks currently 'overlooked' by standard benchmarks focusing on common objects.
Unsupervised Domain Generalization by Learning a Bridge Across Domains
Dec 04, 2021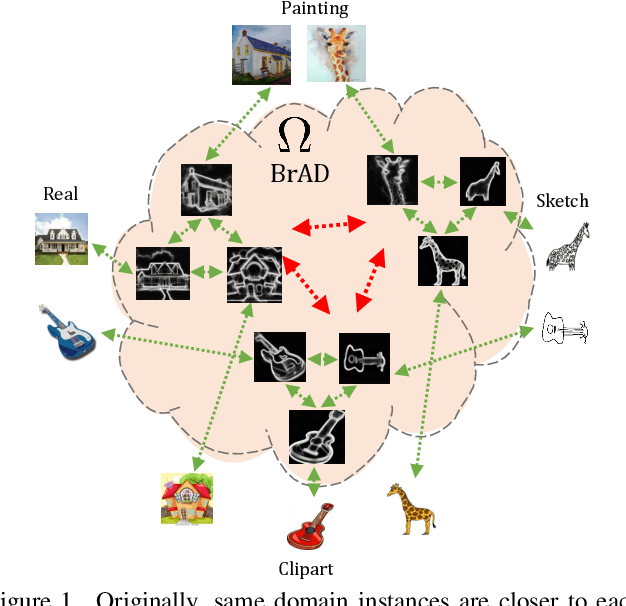
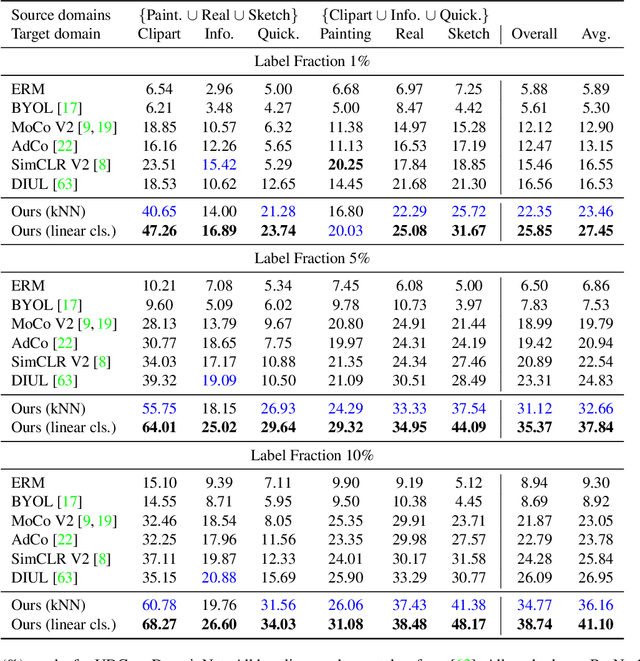
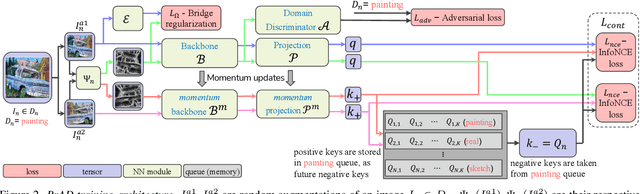
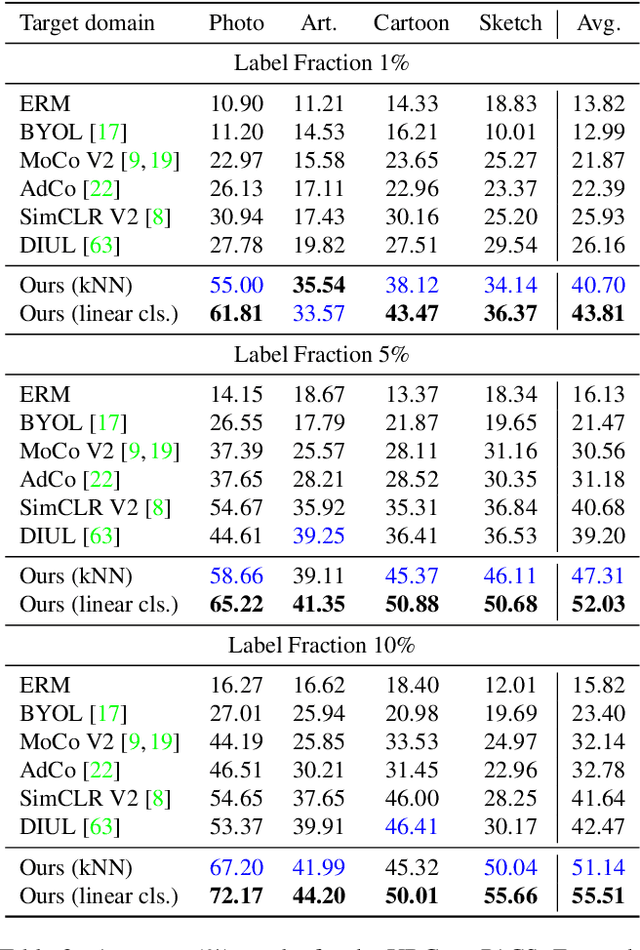
The ability to generalize learned representations across significantly different visual domains, such as between real photos, clipart, paintings, and sketches, is a fundamental capacity of the human visual system. In this paper, different from most cross-domain works that utilize some (or full) source domain supervision, we approach a relatively new and very practical Unsupervised Domain Generalization (UDG) setup of having no training supervision in neither source nor target domains. Our approach is based on self-supervised learning of a Bridge Across Domains (BrAD) - an auxiliary bridge domain accompanied by a set of semantics preserving visual (image-to-image) mappings to BrAD from each of the training domains. The BrAD and mappings to it are learned jointly (end-to-end) with a contrastive self-supervised representation model that semantically aligns each of the domains to its BrAD-projection, and hence implicitly drives all the domains (seen or unseen) to semantically align to each other. In this work, we show how using an edge-regularized BrAD our approach achieves significant gains across multiple benchmarks and a range of tasks, including UDG, Few-shot UDA, and unsupervised generalization across multi-domain datasets (including generalization to unseen domains and classes).
CHARTER: heatmap-based multi-type chart data extraction
Nov 28, 2021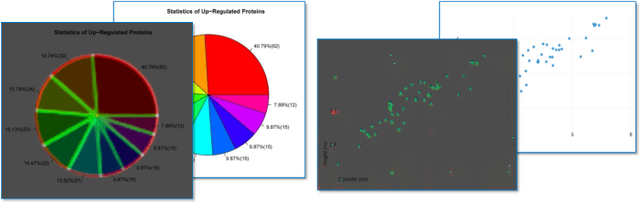
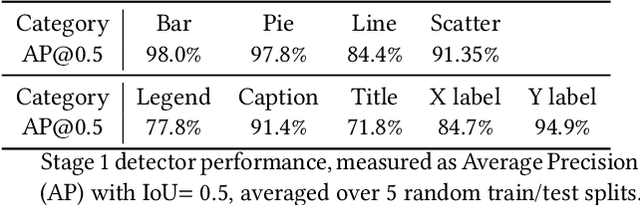
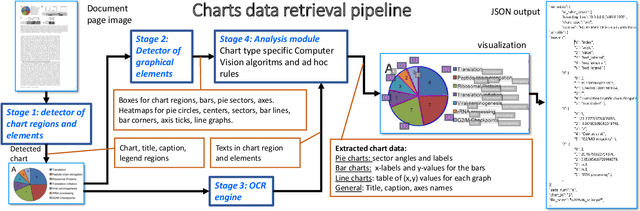
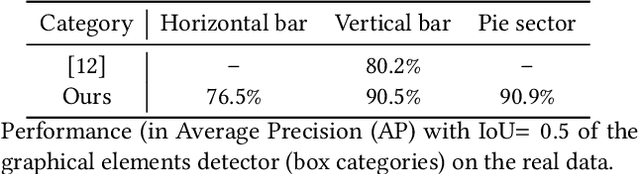
The digital conversion of information stored in documents is a great source of knowledge. In contrast to the documents text, the conversion of the embedded documents graphics, such as charts and plots, has been much less explored. We present a method and a system for end-to-end conversion of document charts into machine readable tabular data format, which can be easily stored and analyzed in the digital domain. Our approach extracts and analyses charts along with their graphical elements and supporting structures such as legends, axes, titles, and captions. Our detection system is based on neural networks, trained solely on synthetic data, eliminating the limiting factor of data collection. As opposed to previous methods, which detect graphical elements using bounding-boxes, our networks feature auxiliary domain specific heatmaps prediction enabling the precise detection of pie charts, line and scatter plots which do not fit the rectangular bounding-box presumption. Qualitative and quantitative results show high robustness and precision, improving upon previous works on popular benchmarks
* Joseph Shtok, Sivan Harary and Leonid Karlinsky had equal contribution