 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVAMOS: A Hierarchical Vision-Language-Action Model for Capability-Modulated and Steerable Navigation
Oct 23, 2025A fundamental challenge in robot navigation lies in learning policies that generalize across diverse environments while conforming to the unique physical constraints and capabilities of a specific embodiment (e.g., quadrupeds can walk up stairs, but rovers cannot). We propose VAMOS, a hierarchical VLA that decouples semantic planning from embodiment grounding: a generalist planner learns from diverse, open-world data, while a specialist affordance model learns the robot's physical constraints and capabilities in safe, low-cost simulation. We enabled this separation by carefully designing an interface that lets a high-level planner propose candidate paths directly in image space that the affordance model then evaluates and re-ranks. Our real-world experiments show that VAMOS achieves higher success rates in both indoor and complex outdoor navigation than state-of-the-art model-based and end-to-end learning methods. We also show that our hierarchical design enables cross-embodied navigation across legged and wheeled robots and is easily steerable using natural language. Real-world ablations confirm that the specialist model is key to embodiment grounding, enabling a single high-level planner to be deployed across physically distinct wheeled and legged robots. Finally, this model significantly enhances single-robot reliability, achieving 3X higher success rates by rejecting physically infeasible plans. Website: https://vamos-vla.github.io/
Long Range Navigator (LRN): Extending robot planning horizons beyond metric maps
Apr 17, 2025A robot navigating an outdoor environment with no prior knowledge of the space must rely on its local sensing to perceive its surroundings and plan. This can come in the form of a local metric map or local policy with some fixed horizon. Beyond that, there is a fog of unknown space marked with some fixed cost. A limited planning horizon can often result in myopic decisions leading the robot off course or worse, into very difficult terrain. Ideally, we would like the robot to have full knowledge that can be orders of magnitude larger than a local cost map. In practice, this is intractable due to sparse sensing information and often computationally expensive. In this work, we make a key observation that long-range navigation only necessitates identifying good frontier directions for planning instead of full map knowledge. To this end, we propose Long Range Navigator (LRN), that learns an intermediate affordance representation mapping high-dimensional camera images to `affordable' frontiers for planning, and then optimizing for maximum alignment with the desired goal. LRN notably is trained entirely on unlabeled ego-centric videos making it easy to scale and adapt to new platforms. Through extensive off-road experiments on Spot and a Big Vehicle, we find that augmenting existing navigation stacks with LRN reduces human interventions at test-time and leads to faster decision making indicating the relevance of LRN. https://personalrobotics.github.io/lrn
Multi-Sample Long Range Path Planning under Sensing Uncertainty for Off-Road Autonomous Driving
Mar 17, 2024



We focus on the problem of long-range dynamic replanning for off-road autonomous vehicles, where a robot plans paths through a previously unobserved environment while continuously receiving noisy local observations. An effective approach for planning under sensing uncertainty is determinization, where one converts a stochastic world into a deterministic one and plans under this simplification. This makes the planning problem tractable, but the cost of following the planned path in the real world may be different than in the determinized world. This causes collisions if the determinized world optimistically ignores obstacles, or causes unnecessarily long routes if the determinized world pessimistically imagines more obstacles. We aim to be robust to uncertainty over potential worlds while still achieving the efficiency benefits of determinization. We evaluate algorithms for dynamic replanning on a large real-world dataset of challenging long-range planning problems from the DARPA RACER program. Our method, Dynamic Replanning via Evaluating and Aggregating Multiple Samples (DREAMS), outperforms other determinization-based approaches in terms of combined traversal time and collision cost. https://sites.google.com/cs.washington.edu/dreams/
HOUND: An Open-Source, Low-cost Research Platform for High-speed Off-road Underactuated Nonholonomic Driving
Nov 19, 2023



Off-road vehicles are susceptible to rollovers in terrains with large elevation features, such as steep hills, ditches, and berms. One way to protect them against rollovers is ruggedization through the use of industrial-grade parts and physical modifications. However, this solution can be prohibitively expensive for academic research labs. Our key insight is that a software-based rollover-prevention system (RPS) enables the use of commercial-off-the-shelf hardware parts that are cheaper than their industrial counterparts, thus reducing overall cost. In this paper, we present HOUND, a small-scale, inexpensive, off-road autonomy platform that can handle challenging outdoor terrains at high speeds through the integration of an RPS. HOUND is integrated with a complete stack for perception and control, geared towards aggressive offroad driving. We deploy HOUND in the real world, at high speeds, on four different terrains covering 50 km of driving and highlight its utility in preventing rollovers and traversing difficult terrain. Additionally, through integration with BeamNG, a state-of-the-art driving simulator, we demonstrate a significant reduction in rollovers without compromising turning ability across a series of simulated experiments. Supplementary material can be found on our website, where we will also release all design documents for the platform: https://sites.google.com/view/prl-hound .
PuSHR: A Multirobot System for Nonprehensile Rearrangement
Mar 02, 2023



We focus on the problem of rearranging a set of objects with a team of car-like robot pushers built using off-the-shelf components. Maintaining control of pushed objects while avoiding collisions in a tight space demands highly coordinated motion that is challenging to execute on constrained hardware. Centralized replanning approaches become intractable even for small-sized problems whereas decentralized approaches often get stuck in deadlocks. Our key insight is that by carefully assigning pushing tasks to robots, we could reduce the complexity of the rearrangement task, enabling robust performance via scalable decentralized control. Based on this insight, we built PuSHR, a system that optimally assigns pushing tasks and trajectories to robots offline, and performs trajectory tracking via decentralized control online. Through an ablation study in simulation, we demonstrate that PuSHR dominates baselines ranging from purely decentralized to fully decentralized in terms of success rate and time efficiency across challenging tasks with up to 4 robots. Hardware experiments demonstrate the transfer of our system to the real world and highlight its robustness to model inaccuracies. Our code can be found at https://github.com/prl-mushr/pushr, and videos from our experiments at https://youtu.be/DIWmZerF_O8.
MuSHR: A Low-Cost, Open-Source Robotic Racecar for Education and Research
Aug 22, 2019

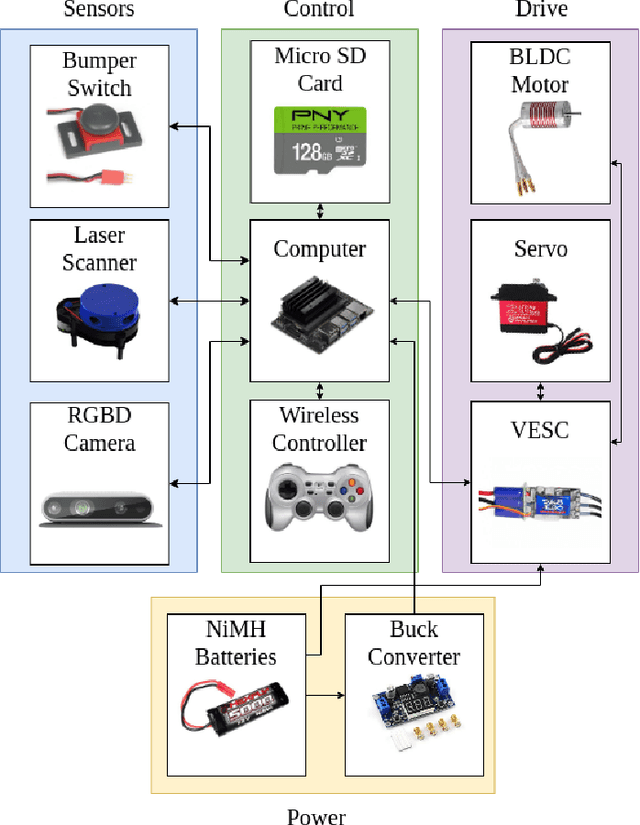
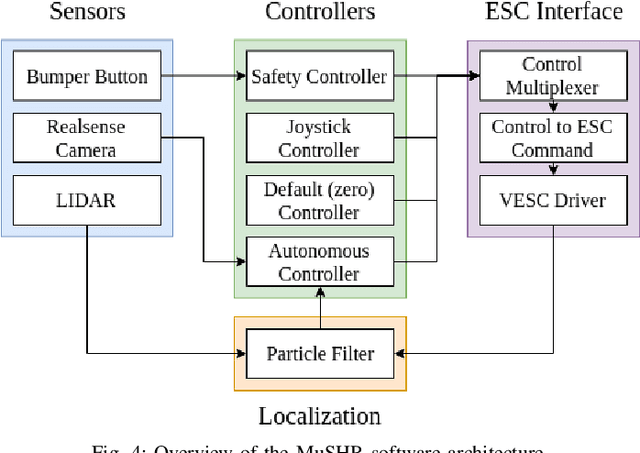
We present MuSHR, the Multi-agent System for non-Holonomic Racing. MuSHR is a low-cost, open-source robotic racecar platform for education and research, developed by the Personal Robotics Lab in the Paul G. Allen School of Computer Science & Engineering at the University of Washington. MuSHR aspires to contribute towards democratizing the field of robotics as a low-cost platform that can be built and deployed by following detailed, open documentation and do-it-yourself tutorials. A set of demos and lab assignments developed for the Mobile Robots course at the University of Washington provide guided, hands-on experience with the platform, and milestones for further development. MuSHR is a valuable asset for academic research labs, robotics instructors, and robotics enthusiasts.
Robot-Assisted Feeding: Generalizing Skewering Strategies across Food Items on a Realistic Plate
Jun 05, 2019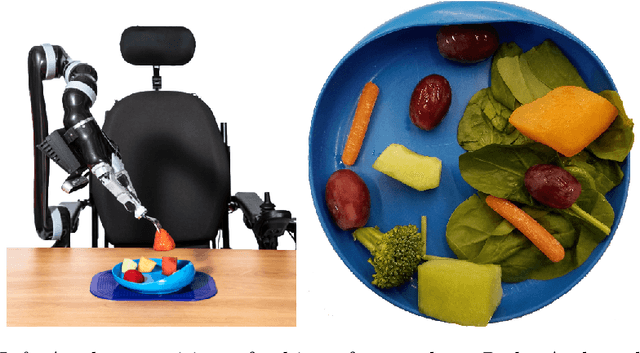
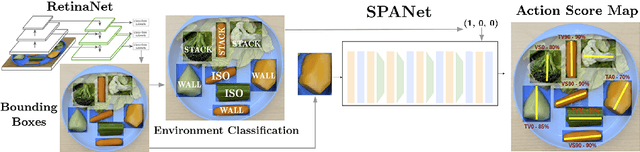

A robot-assisted feeding system must successfully acquire many different food items and transfer them to a user. A key challenge is the wide variation in the physical properties of food, demanding diverse acquisition strategies that are also capable of adapting to previously unseen items. Our key insight is that items with similar physical properties will exhibit similar success rates across an action space, allowing us to generalize to previously unseen items. To better understand which acquisition strategies work best for varied food items, we collected a large, rich dataset of 2450 robot bite acquisition trials for 16 food items with varying properties. Analyzing the dataset provided insights into how the food items' surrounding environment, fork pitch, and fork roll angles affect bite acquisition success. We then developed a bite acquisition framework that takes the image of a full plate as an input, uses RetinaNet to create bounding boxes around food items in the image, and then applies our skewering-position-action network (SPANet) to choose a target food item and a corresponding action so that the bite acquisition success rate is maximized. SPANet also uses the surrounding environment features of food items to predict action success rates. We used this framework to perform multiple experiments on uncluttered and cluttered plates with in-class and out-of-class food items. Results indicate that SPANet can successfully generalize skewering strategies to previously unseen food items.