 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
VFH+ based shared control for remotely operated mobile robots
Nov 10, 2020
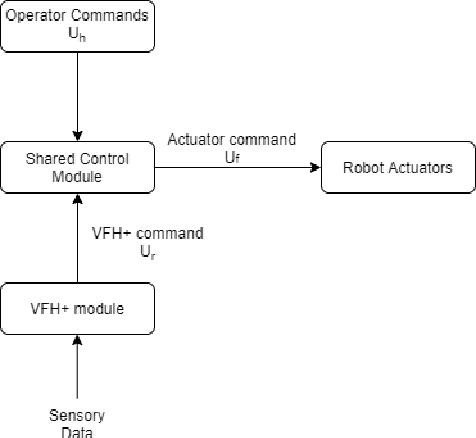
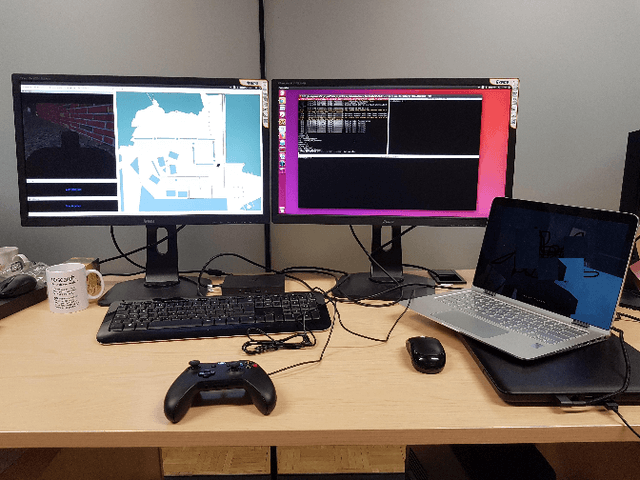
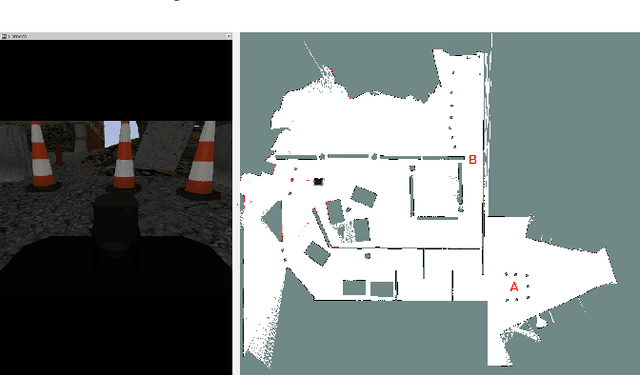
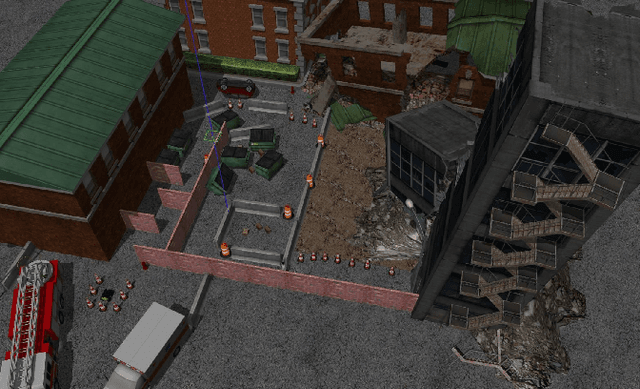
This paper addresses the problem of safe and efficient navigation in remotely controlled robots operating in hazardous and unstructured environments; or conducting other remote robotic tasks. A shared control method is presented which blends the commands from a VFH+ obstacle avoidance navigation module with the teleoperation commands provided by an operator via a joypad. The presented approach offers several advantages such as flexibility allowing for a straightforward adaptation of the controller's behaviour and easy integration with variable autonomy systems; as well as the ability to cope with dynamic environments. The advantages of the presented controller are demonstrated by an experimental evaluation in a disaster response scenario. More specifically, presented evidence show a clear performance increase in terms of safety and task completion time compared to a pure teleoperation approach, as well as an ability to cope with previously unobserved obstacles.
$ε^*$+: An Online Coverage Path Planning Algorithm for Energy-constrained Autonomous Vehicles
Aug 29, 2020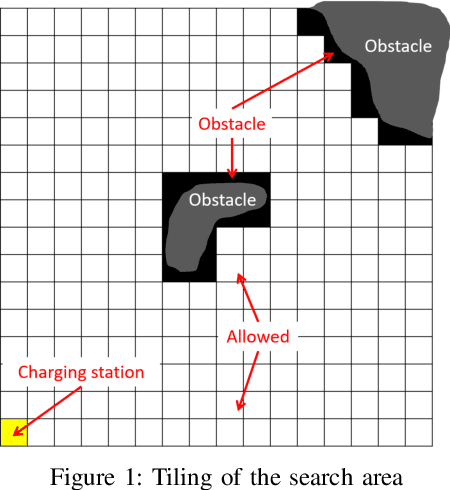
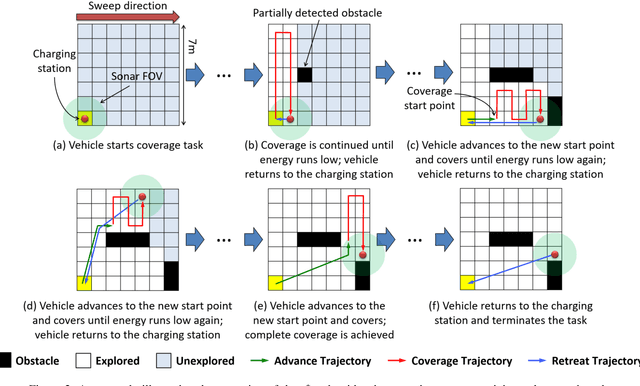
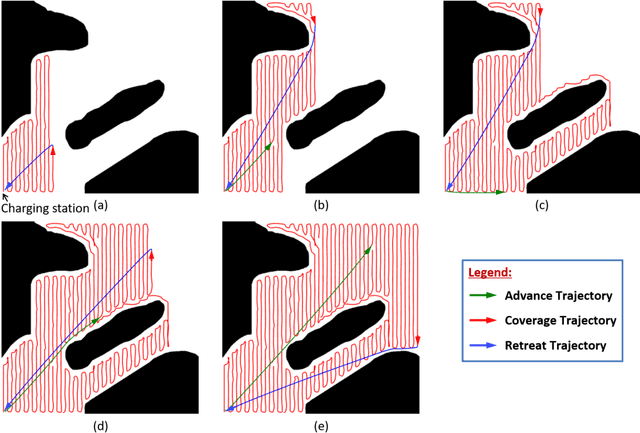
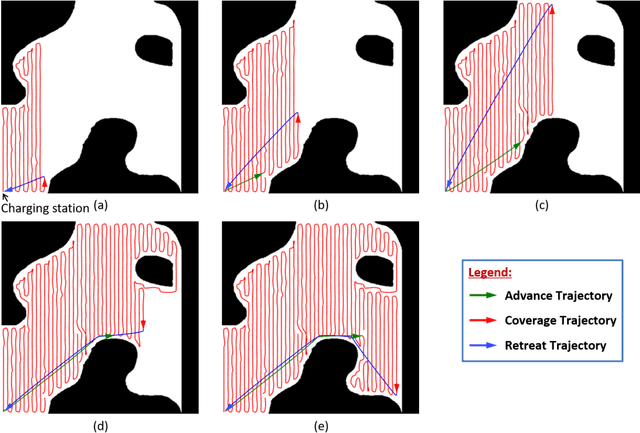
This paper presents a novel algorithm, called $\epsilon^*$+, for online coverage path planning of unknown environments using energy-constrained autonomous vehicles. Due to limited battery size, the energy-constrained vehicles have limited duration of operation time. Therefore, while executing a coverage trajectory, the vehicle has to return to the charging station for a recharge before the battery runs out. In this regard, the $\epsilon^*$+ algorithm enables the vehicle to retreat back to the charging station based on the remaining energy which is monitored throughout the coverage process. This is followed by an advance trajectory that takes the vehicle to a near by unexplored waypoint to restart the coverage process, instead of taking it back to the previous left over point of the retreat trajectory; thus reducing the overall coverage time. The proposed $\epsilon^*$+ algorithm is an extension of the $\epsilon^*$ algorithm, which utilizes an Exploratory Turing Machine (ETM) as a supervisor to navigate the vehicle with back and forth trajectory for complete coverage. The performance of the $\epsilon^*$+ algorithm is validated on complex scenarios using Player/Stage which is a high-fidelity robotic simulator.
Scaled-YOLOv4: Scaling Cross Stage Partial Network
Nov 16, 2020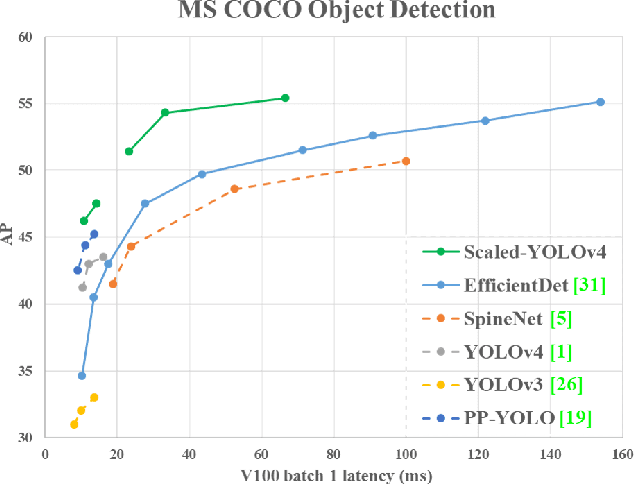
We show that the YOLOv4 object detection neural network based on the CSP approach, scales both up and down and is applicable to small and large networks while maintaining optimal speed and accuracy. We propose a network scaling approach that modifies not only the depth, width, resolution, but also structure of the network. YOLOv4-large model achieves state-of-the-art results: 55.4% AP (73.3% AP50) for the MS COCO dataset at a speed of 15 FPS on Tesla V100, while with the test time augmentation, YOLOv4-large achieves 55.8% AP (73.2 AP50). To the best of our knowledge, this is currently the highest accuracy on the COCO dataset among any published work. The YOLOv4-tiny model achieves 22.0% AP (42.0% AP50) at a speed of 443 FPS on RTX 2080Ti, while by using TensorRT, batch size = 4 and FP16-precision the YOLOv4-tiny achieves 1774 FPS.
Robust Real-time UAV Replanning Using Guided Gradient-based Optimization and Topological Paths
Dec 29, 2019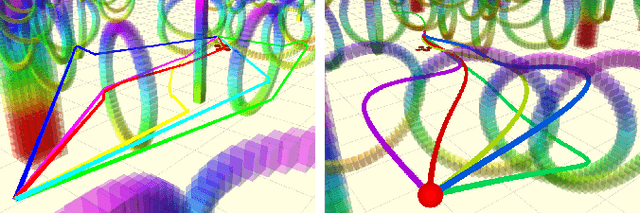
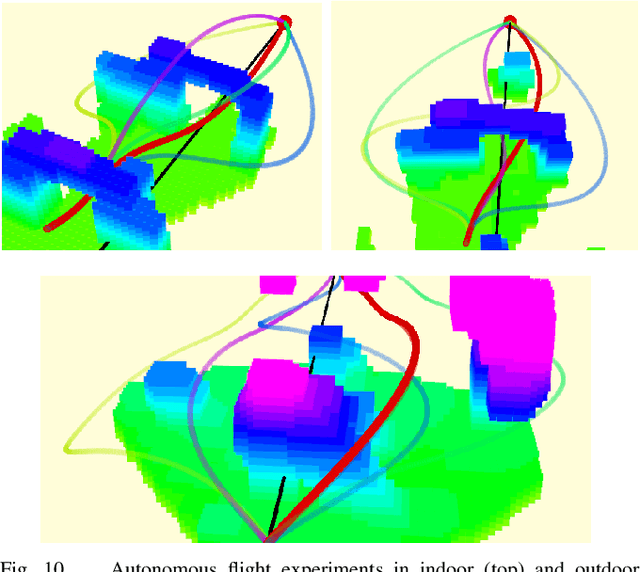
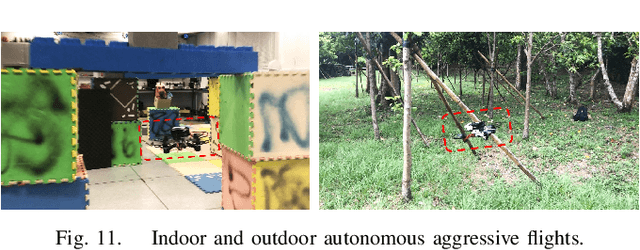
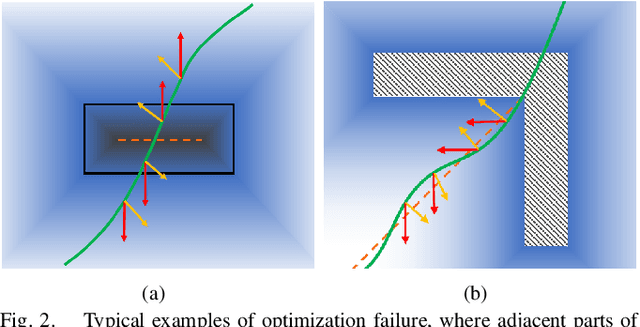
Gradient-based trajectory optimization (GTO) has gained wide popularity for quadrotor trajectory replanning. However, it suffers from local minima, which is not only fatal to safety but also unfavorable for smooth navigation. In this paper, we propose a replanning method based on GTO addressing this issue systematically. A path-guided optimization (PGO) approach is devised to tackle infeasible local minima, which improves the replanning success rate significantly. A topological path searching algorithm is developed to capture a collection of distinct useful paths in 3-D environments, each of which then guides an independent trajectory optimization. It activates a more comprehensive exploration of the solution space and output superior replanned trajectories. Benchmark evaluation shows that our method outplays state-of-the-art methods regarding replanning success rate and optimality. Challenging experiments of aggressive autonomous flight are presented to demonstrate the robustness of our method. We will release our implementation as an open-source package.
Multi-Agent Online Optimization with Delays: Asynchronicity, Adaptivity, and Optimism
Dec 21, 2020
Online learning has been successfully applied to many problems in which data are revealed over time. In this paper, we provide a general framework for studying multi-agent online learning problems in the presence of delays and asynchronicities. Specifically, we propose and analyze a class of adaptive dual averaging schemes in which agents only need to accumulate gradient feedback received from the whole system, without requiring any between-agent coordination. In the single-agent case, the adaptivity of the proposed method allows us to extend a range of existing results to problems with potentially unbounded delays between playing an action and receiving the corresponding feedback. In the multi-agent case, the situation is significantly more complicated because agents may not have access to a global clock to use as a reference point; to overcome this, we focus on the information that is available for producing each prediction rather than the actual delay associated with each feedback. This allows us to derive adaptive learning strategies with optimal regret bounds, at both the agent and network levels. Finally, we also analyze an "optimistic" variant of the proposed algorithm which is capable of exploiting the predictability of problems with a slower variation and leads to improved regret bounds.
HypperSteer: Hypothetical Steering and Data Perturbation in Sequence Prediction with Deep Learning
Nov 04, 2020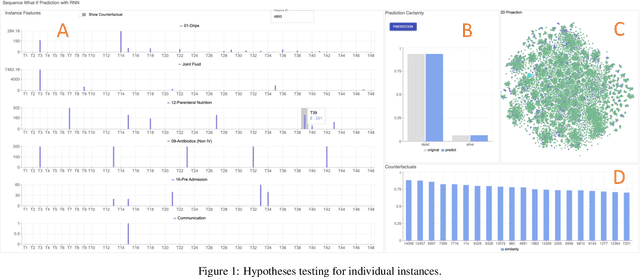
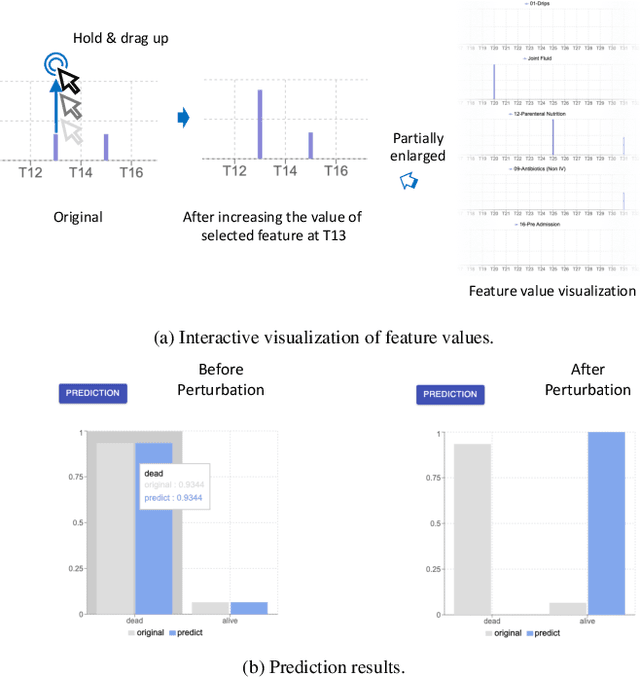
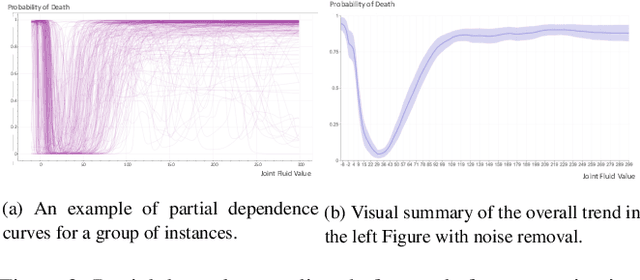
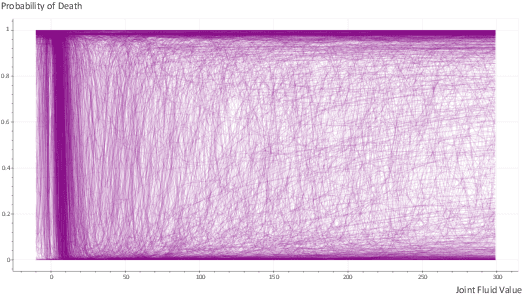
Deep Recurrent Neural Networks (RNN) continues to find success in predictive decision-making with temporal event sequences. Recent studies have shown the importance and practicality of visual analytics in interpreting deep learning models for real-world applications. However, very limited work enables interactions with deep learning models and guides practitioners to form hypotheticals towards the desired prediction outcomes, especially for sequence prediction. Specifically, no existing work has addressed the what-if analysis and value perturbation along different time-steps for sequence outcome prediction. We present a model-agnostic visual analytics tool, HypperSteer, that steers hypothetical testing and allows users to perturb data for sequence predictions interactively. We showcase how HypperSteer helps in steering patient data to achieve desired treatment outcomes and discuss how HypperSteer can serve as a comprehensive solution for other practical scenarios.
From Points to Multi-Object 3D Reconstruction
Dec 21, 2020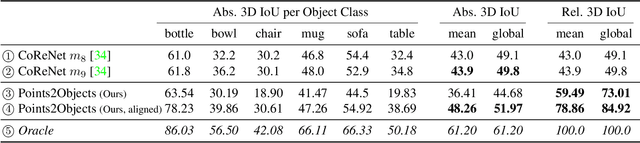
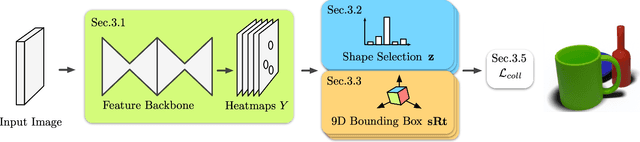
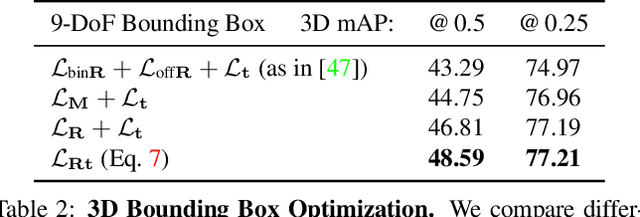
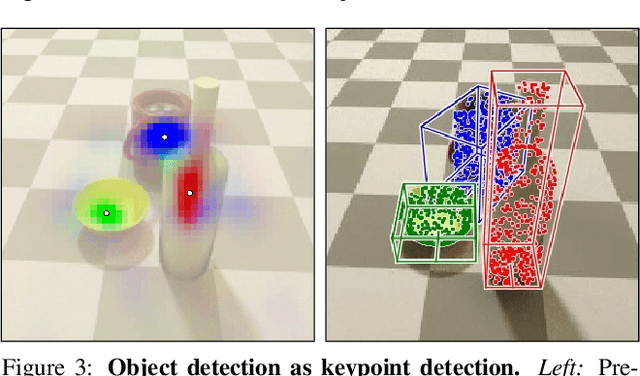
We propose a method to detect and reconstruct multiple 3D objects from a single RGB image. The key idea is to optimize for detection, alignment and shape jointly over all objects in the RGB image, while focusing on realistic and physically plausible reconstructions. To this end, we propose a keypoint detector that localizes objects as center points and directly predicts all object properties, including 9-DoF bounding boxes and 3D shapes -- all in a single forward pass. The proposed method formulates 3D shape reconstruction as a shape selection problem, i.e. it selects among exemplar shapes from a given database. This makes it agnostic to shape representations, which enables a lightweight reconstruction of realistic and visually-pleasing shapes based on CAD-models, while the training objective is formulated around point clouds and voxel representations. A collision-loss promotes non-intersecting objects, further increasing the reconstruction realism. Given the RGB image, the presented approach performs lightweight reconstruction in a single-stage, it is real-time capable, fully differentiable and end-to-end trainable. Our experiments compare multiple approaches for 9-DoF bounding box estimation, evaluate the novel shape-selection mechanism and compare to recent methods in terms of 3D bounding box estimation and 3D shape reconstruction quality.
Comparative Analysis of Agent-Oriented Task Assignment and Path Planning Algorithms Applied to Drone Swarms
Jan 13, 2021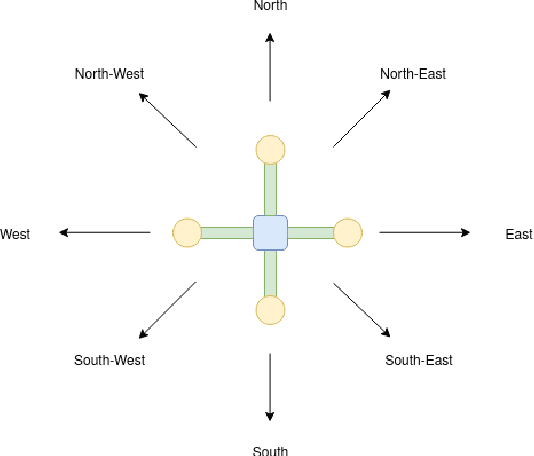
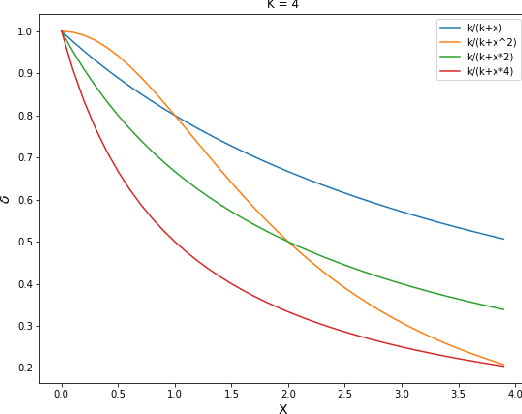
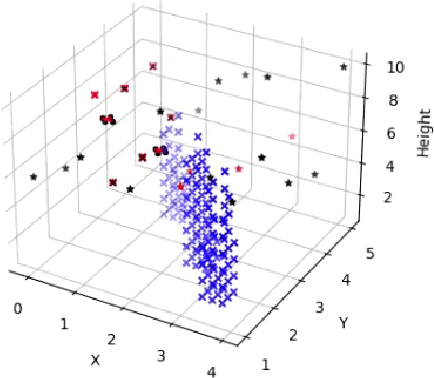
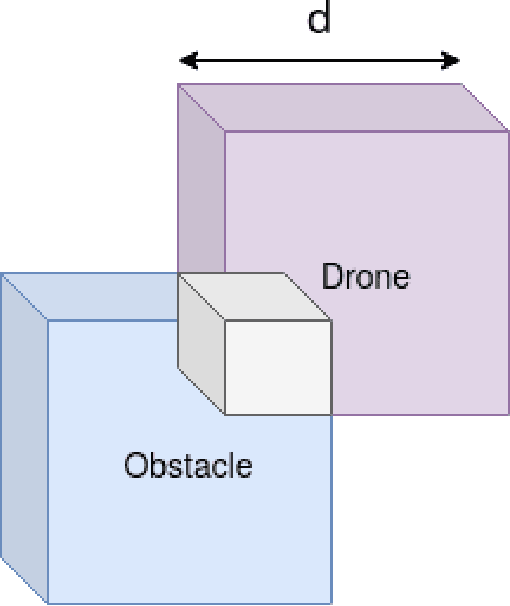
Autonomous drone swarms are a burgeoning technology with significant applications in the field of mapping, inspection, transportation and monitoring. To complete a task, each drone has to accomplish a sub-goal within the context of the overall task at hand and navigate through the environment by avoiding collision with obstacles and with other agents in the environment. In this work, we choose the task of optimal coverage of an environment with drone swarms where the global knowledge of the goal states and its positions are known but not of the obstacles. The drones have to choose the Points of Interest (PoI) present in the environment to visit, along with the order to be visited to ensure fast coverage. We model this task in a simulation and use an agent-oriented approach to solve the problem. We evaluate different policy networks trained with reinforcement learning algorithms based on their effectiveness, i.e. time taken to map the area and efficiency, i.e. computational requirements. We couple the task assignment with path planning in an unique way for performing collision avoidance during navigation and compare a grid-based global planning algorithm, i.e. Wavefront and a gradient-based local planning algorithm, i.e. Potential Field. We also evaluate the Potential Field planning algorithm with different cost functions, propose a method to adaptively modify the velocity of the drone when using the Huber loss function to perform collision avoidance and observe its effect on the trajectory of the drones. We demonstrate our experiments in 2D and 3D simulations.
2nd Place Solution to Instance Segmentation of IJCAI 3D AI Challenge 2020
Oct 21, 2020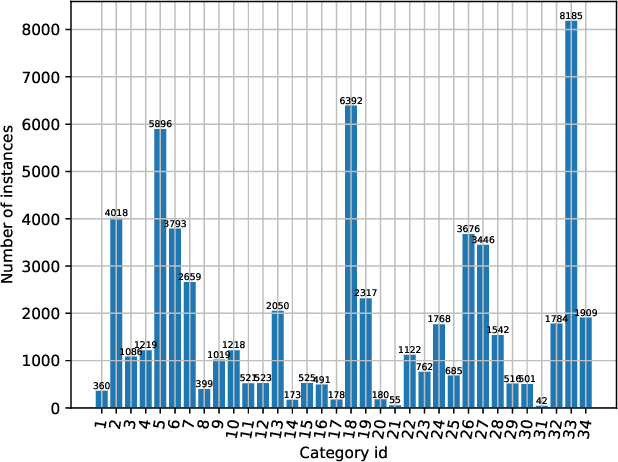
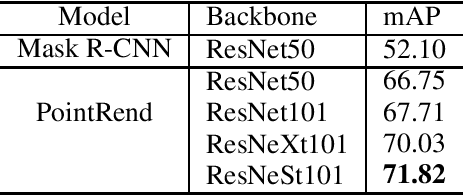
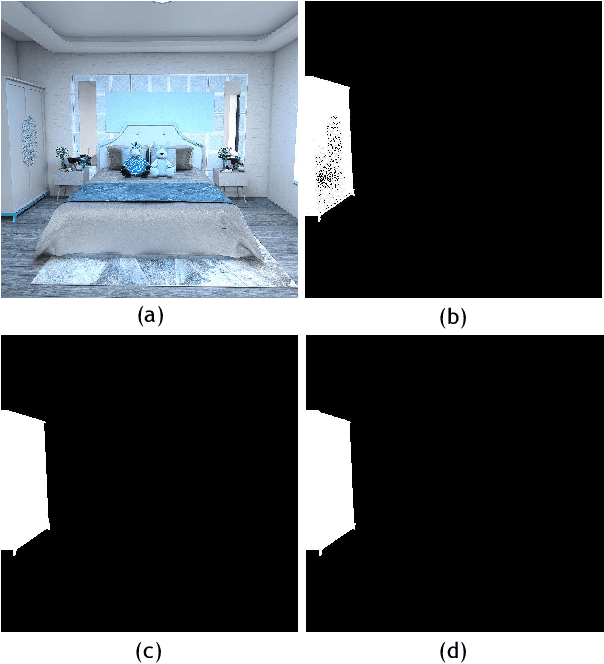
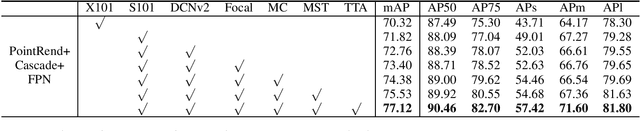
Compared with MS-COCO, the dataset for the competition has a larger proportion of large objects which area is greater than 96x96 pixels. As getting fine boundaries is vitally important for large object segmentation, Mask R-CNN with PointRend is selected as the base segmentation framework to output high-quality object boundaries. Besides, a better engine that integrates ResNeSt, FPN and DCNv2, and a range of effective tricks that including multi-scale training and test time augmentation are applied to improve segmentation performance. Our best performance is an ensemble of four models (three PointRend-based models and SOLOv2), which won the 2nd place in IJCAI-PRICAI 3D AI Challenge 2020: Instance Segmentation.
Bridging the Gap Between Safety and Real-Time Performance in Receding-Horizon Trajectory Design for Mobile Robots
Sep 18, 2018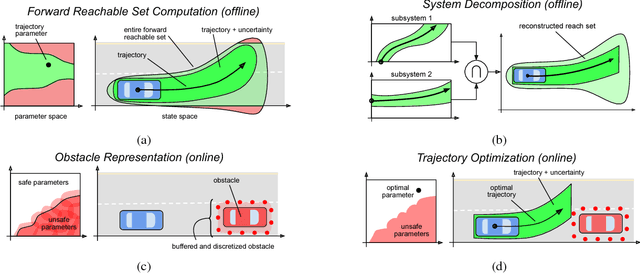
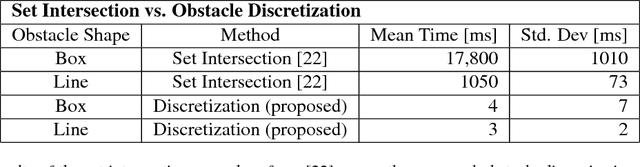
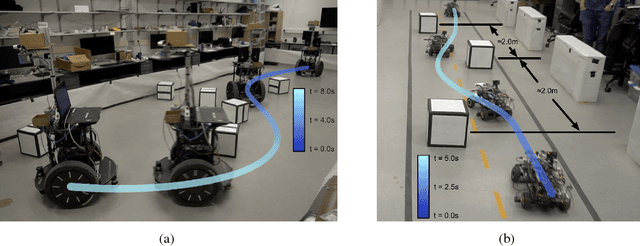
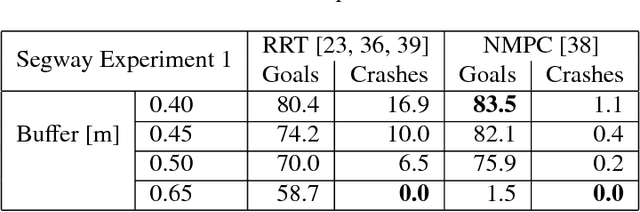
Autonomous mobile robots must operate with limited sensor horizons in unpredictable environments. To do so, they use a receding-horizon strategy to plan trajectories, by executing a short plan while creating the next plan. However, creating safe, dynamically-feasible trajectories in real time is challenging; and, planners must ensure that they are persistently feasible, meaning that a new trajectory is always available before the previous one has finished executing. Existing approaches make a tradeoff between model complexity and planning speed, which can require sacrificing guarantees of safety and dynamic feasibility. This work presents the Reachability-based Trajectory Design (RTD) method for trajectory planning. RTD begins with an offline Forward Reachable Set (FRS) computation of a robot's motion while it tracks parameterized trajectories; the FRS also provably bounds tracking error. At runtime, the FRS is used to map obstacles to the space of parameterized trajectories, which allows RTD to select a safe trajectory at every planning iteration. RTD prescribes a method of representing obstacles to ensure that these constraints can be created and evaluated in real time while maintaining provable safety. Persistent feasibility is achieved by prescribing a minimum duration of planned trajectories, and a minimum sensor horizon. A system decomposition approach is used to increase the dimension of the parameterized trajectories in the FRS, allowing for RTD to create more complex plans at runtime. RTD is compared in simulation with Rapidly-exploring Random Trees (RRT) and Nonlinear Model-Predictive Control (NMPC). RTD is also demonstrated on two hardware platforms in randomly-crafted environments: a differential-drive Segway, and a car-like Rover. The proposed method is shown as safe and persistently feasible across thousands of simulations and dozens of hardware demos.