 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to Edge"Time": models, code, and papers
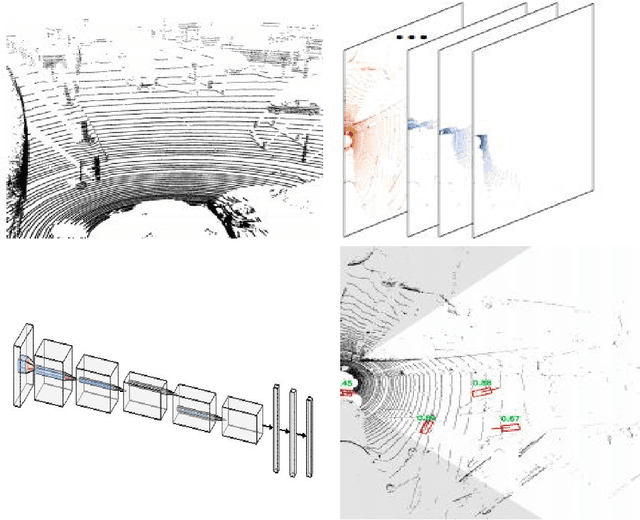
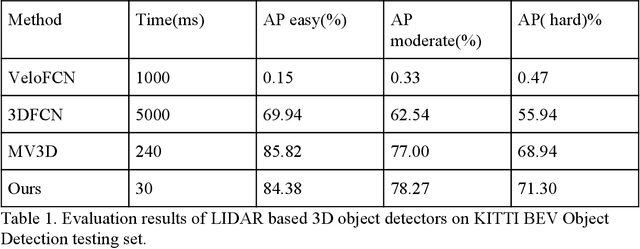
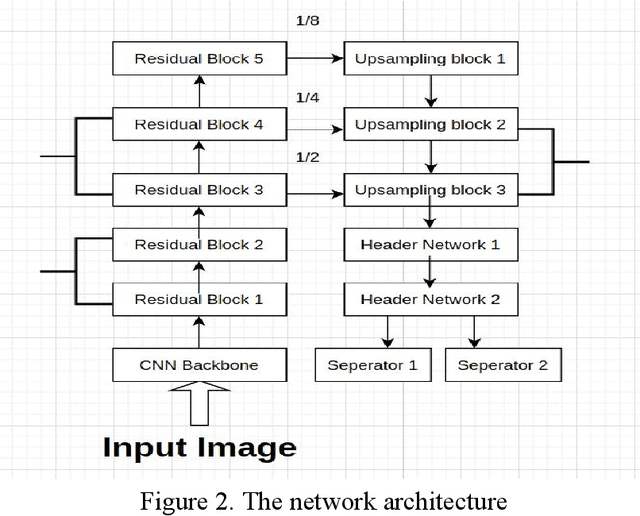
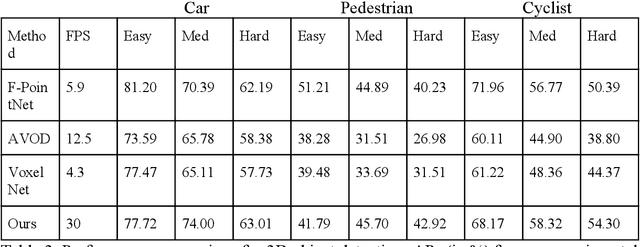
Learning to Detect 3D Objects from Point Clouds in Real Time
Jun 05, 2020
In this paper, we present a combined architecture using dilated and transposed convolutional neural networks for accurate and efficient semantic image segmentation. In contrast to previous fully convolutional neural networks such as FCN with almost all computation shared on the entire image, we propose an additional architecture which we have named as dilated - transposed fully convolutional neural networks. To achieve this goal, we used dilated convolutional layers in downsampling and transposed convolutional layers in upsampling layers. We have used skip connections in between the blocks formed by convolutions and max pooling layers. This type of architecture has been used successfully in the past for image classification using residual network. In addition we also found selu activation function instead of relu to give better results on the test set images. We reason this is the due to avoiding the model getting stuck in a local minimum, thus experiencing a famous vanishing gradient problem in case with relu activation function. Meanwhile, our result achieved pixel wise class accuracy of 88% on the test set and mean Intersection Over Union(IOU) value of 53.5 which is better than the state of the art using the previous fully convolutional neural networks.
Deep Learning for Moving Blockage Predictionusing Real Millimeter Wave Measurements
Jan 18, 2021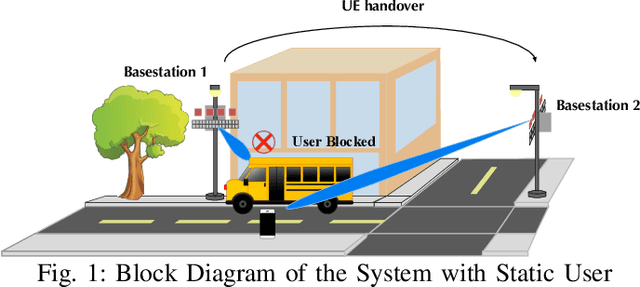
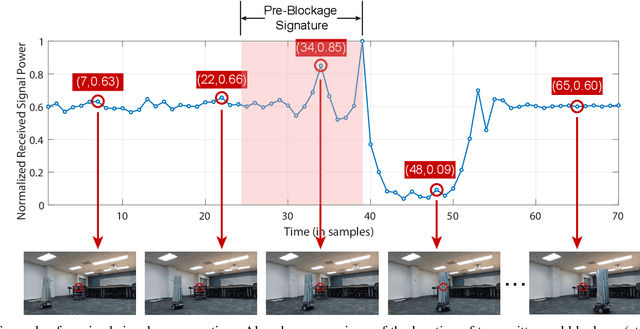
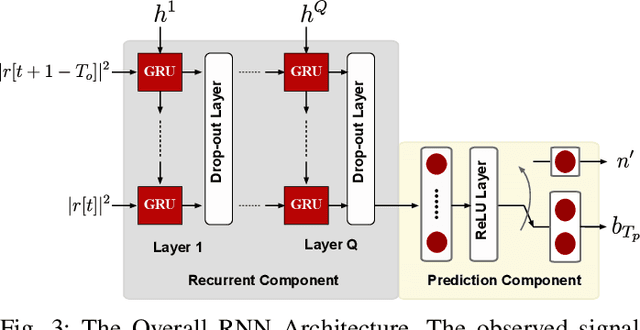
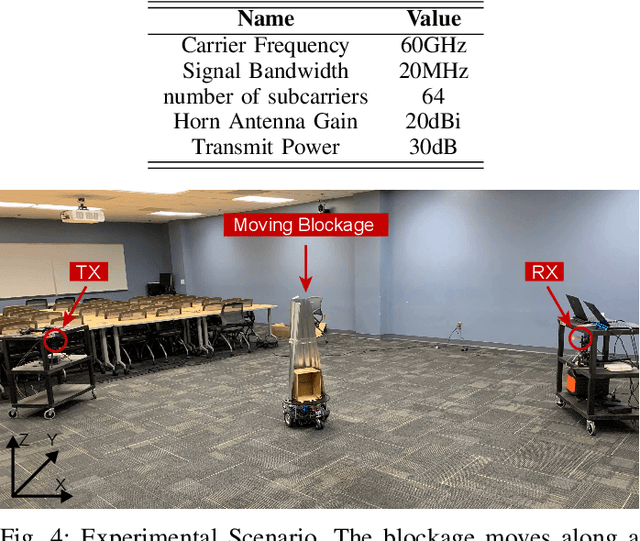
Millimeter wave (mmWave) communication is being seriously considered for the next generation communication systems because of its ability to support high bandwidth and high data rates. Unfortunately, these systems perform badly in the presence of blockage. A sudden blockage in the line of sight(LOS) link leads to communication disconnection, which causes a reliability problem. Also, searching alternative base stations(BS) for re-connection results in latency overhead. In this paper, we tackle these problems by predicting the time of blockage occurrence using a machine learning (ML) technique. In our approach, BS learns how to predict that a certain link will experience blockage in the near future using the received signal power. Simulation results on a real dataset show that blockage occurrence can be predicted with 85% accuracy and the exact time instance of blockage occurrence can be obtained with low error. Thus the proposed method reduces the communication disconnections in mmWave communication, thereby increasing reliability and reducing latency of such systems.
Out-of-distribution detection in satellite image classification
Apr 09, 2021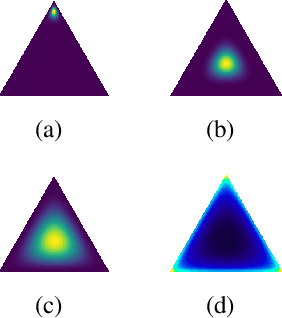
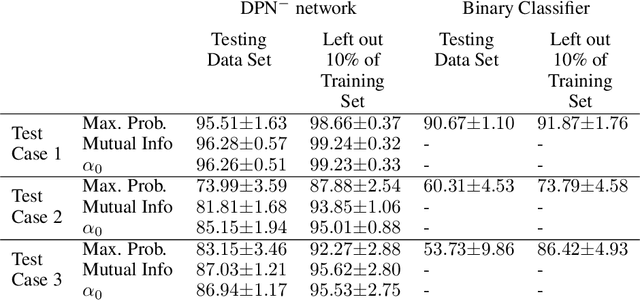
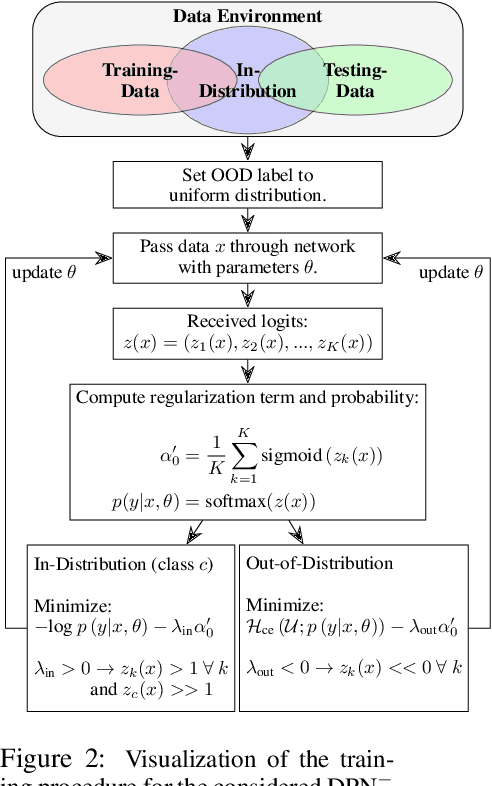
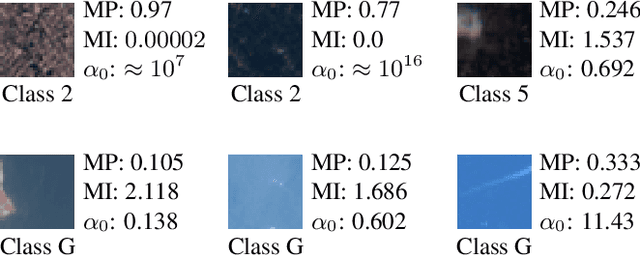
In satellite image analysis, distributional mismatch between the training and test data may arise due to several reasons, including unseen classes in the test data and differences in the geographic area. Deep learning based models may behave in unexpected manner when subjected to test data that has such distributional shifts from the training data, also called out-of-distribution (OOD) examples. Predictive uncertainly analysis is an emerging research topic which has not been explored much in context of satellite image analysis. Towards this, we adopt a Dirichlet Prior Network based model to quantify distributional uncertainty of deep learning models for remote sensing. The approach seeks to maximize the representation gap between the in-domain and OOD examples for a better identification of unknown examples at test time. Experimental results on three exemplary test scenarios show the efficacy of the model in satellite image analysis.
OneVision: Centralized to Distributed Controller Synthesis with Delay Compensation
Apr 14, 2021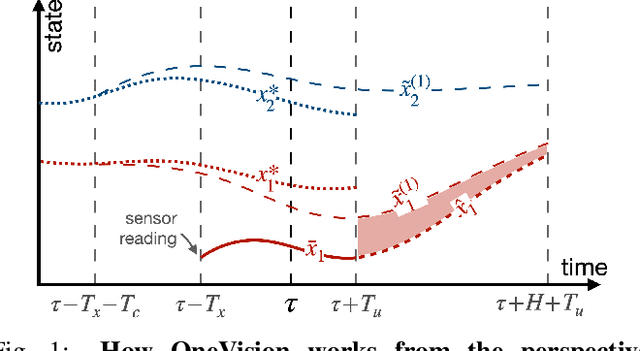
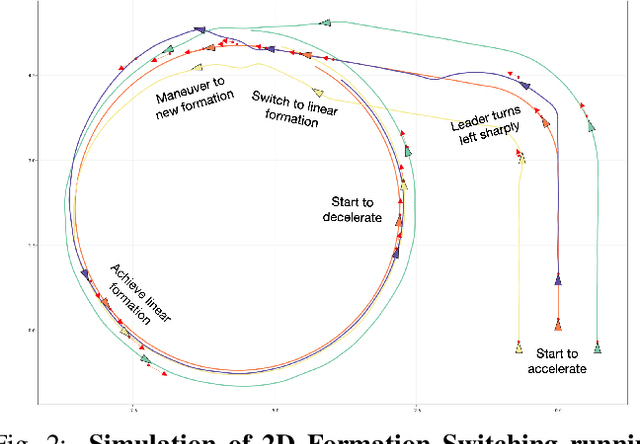
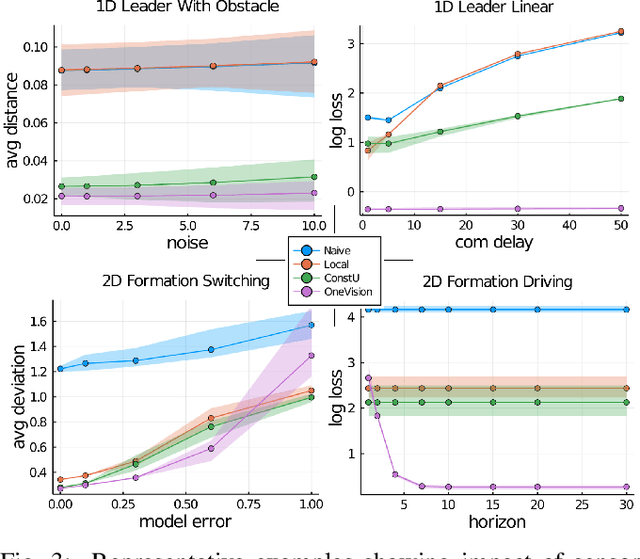
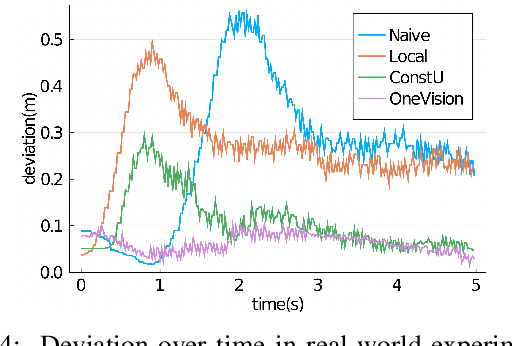
We propose a new algorithm to simplify the controller development for distributed robotic systems subject to external observations, disturbances, and communication delays. Unlike prior approaches that propose specialized solutions to handling communication latency for specific robotic applications, our algorithm uses an arbitrary centralized controller as the specification and automatically generates distributed controllers with communication management and delay compensation. We formulate our goal as nonlinear optimal control -- using a regret minimizing objective that measures how much the distributed agents behave differently from the delay-free centralized response -- and solve for optimal actions w.r.t. local estimations of this objective using gradient-based optimization. We analyze our proposed algorithm's behavior under a linear time-invariant special case and prove that the closed-loop dynamics satisfy a form of input-to-state stability w.r.t. unexpected disturbances and observations. Our experimental results on both simulated and real-world robotic tasks demonstrate the practical usefulness of our approach and show significant improvement over several baseline approaches.
Non-parametric Memory for Spatio-Temporal Segmentation of Construction Zones for Self-Driving
Jan 18, 2021
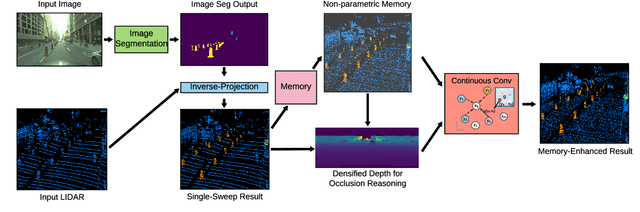
In this paper, we introduce a non-parametric memory representation for spatio-temporal segmentation that captures the local space and time around an autonomous vehicle (AV). Our representation has three important properties: (i) it remembers what it has seen in the past, (ii) it reinforces and (iii) forgets its past beliefs based on new evidence. Reinforcing is important as the first time we see an element we might be uncertain, e.g, if the element is heavily occluded or at range. Forgetting is desirable, as otherwise false positives will make the self driving vehicle behave erratically. Our process is informed by 3D reasoning, as occlusion is key to distinguishing between the desire to forget and to remember. We show how our method can be used as an online component to complement static world representations such as HD maps by detecting and remembering changes that should be superimposed on top of this static view due to such events.
Combined Transmission and Distribution State-Estimation for Future Electric Grids
May 14, 2021
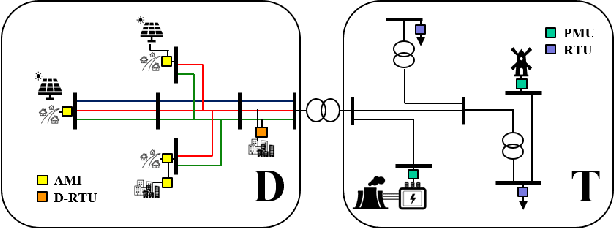
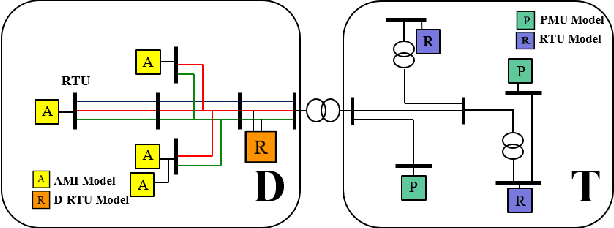
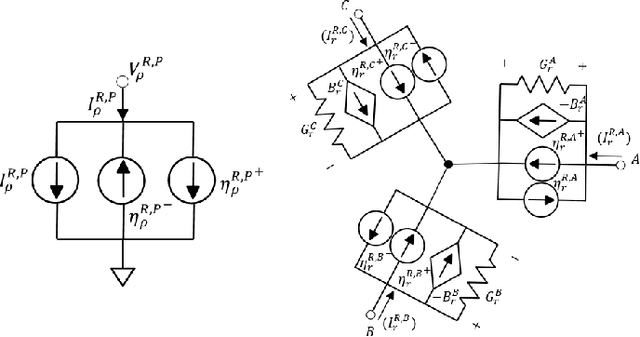
Proliferation of grid resources on the distribution network along with the inability to forecast them accurately will render the existing methodology of grid operation and control untenable in the future. Instead, a more distributed yet coordinated approach for grid operation and control will emerge that models and analyzes the grid with a larger footprint and deeper hierarchy to unify control of disparate T&D grid resources under a common framework. Such approach will require AC state-estimation (ACSE) of joint T&D networks. Today, no practical method for realizing combined T&D ACSE exists. This paper addresses that gap from circuit-theoretic perspective through realizing a combined T&D ACSE solution methodology that is fast, convex and robust against bad-data. To address daunting challenges of problem size (million+ variables) and data-privacy, the approach is distributed both in memory and computing resources. To ensure timely convergence, the approach constructs a distributed circuit model for combined T&D networks and utilizes node-tearing techniques for efficient parallelism. To demonstrate the efficacy of the approach, combined T&D ACSE algorithm is run on large test networks that comprise of multiple T&D feeders. The results reflect the accuracy of the estimates in terms of root mean-square error and algorithm scalability in terms of wall-clock time.
GATSBI: Generative Agent-centric Spatio-temporal Object Interaction
Apr 09, 2021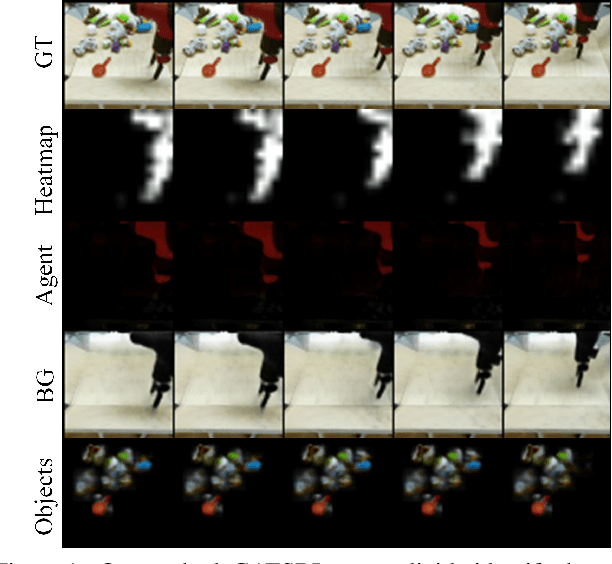
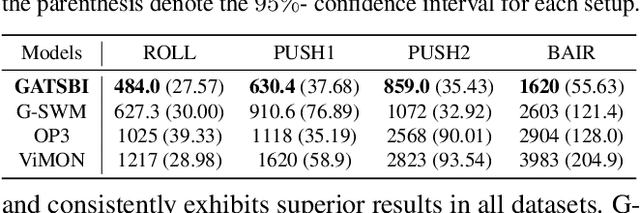
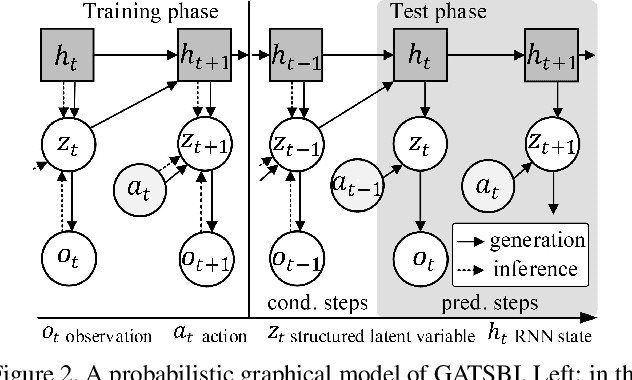
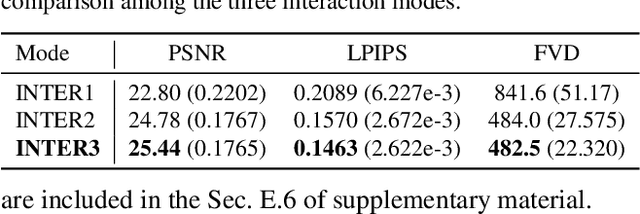
We present GATSBI, a generative model that can transform a sequence of raw observations into a structured latent representation that fully captures the spatio-temporal context of the agent's actions. In vision-based decision-making scenarios, an agent faces complex high-dimensional observations where multiple entities interact with each other. The agent requires a good scene representation of the visual observation that discerns essential components and consistently propagates along the time horizon. Our method, GATSBI, utilizes unsupervised object-centric scene representation learning to separate an active agent, static background, and passive objects. GATSBI then models the interactions reflecting the causal relationships among decomposed entities and predicts physically plausible future states. Our model generalizes to a variety of environments where different types of robots and objects dynamically interact with each other. We show GATSBI achieves superior performance on scene decomposition and video prediction compared to its state-of-the-art counterparts.
Toeplitz Inverse Covariance-Based Clustering of Multivariate Time Series Data
May 15, 2018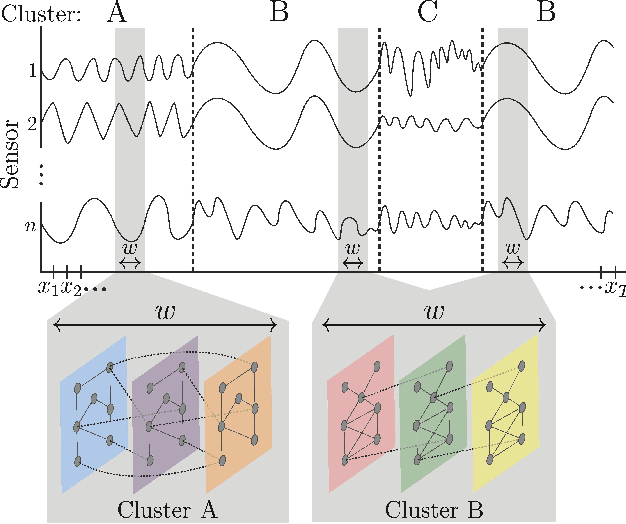
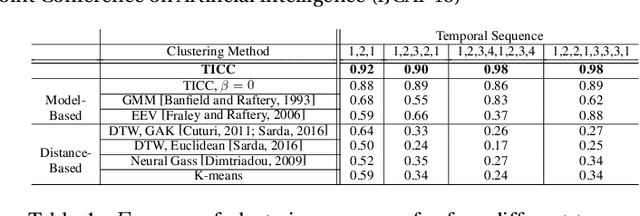
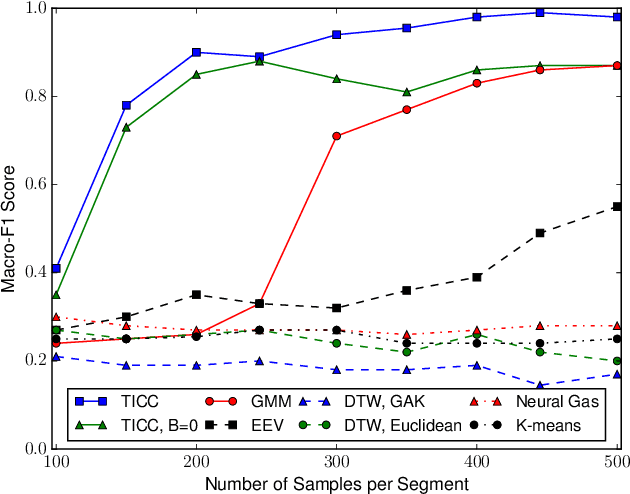
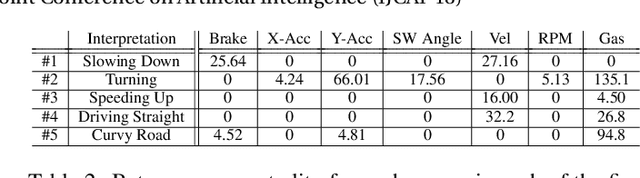
Subsequence clustering of multivariate time series is a useful tool for discovering repeated patterns in temporal data. Once these patterns have been discovered, seemingly complicated datasets can be interpreted as a temporal sequence of only a small number of states, or clusters. For example, raw sensor data from a fitness-tracking application can be expressed as a timeline of a select few actions (i.e., walking, sitting, running). However, discovering these patterns is challenging because it requires simultaneous segmentation and clustering of the time series. Furthermore, interpreting the resulting clusters is difficult, especially when the data is high-dimensional. Here we propose a new method of model-based clustering, which we call Toeplitz Inverse Covariance-based Clustering (TICC). Each cluster in the TICC method is defined by a correlation network, or Markov random field (MRF), characterizing the interdependencies between different observations in a typical subsequence of that cluster. Based on this graphical representation, TICC simultaneously segments and clusters the time series data. We solve the TICC problem through alternating minimization, using a variation of the expectation maximization (EM) algorithm. We derive closed-form solutions to efficiently solve the two resulting subproblems in a scalable way, through dynamic programming and the alternating direction method of multipliers (ADMM), respectively. We validate our approach by comparing TICC to several state-of-the-art baselines in a series of synthetic experiments, and we then demonstrate on an automobile sensor dataset how TICC can be used to learn interpretable clusters in real-world scenarios.
Neural Attention Distillation: Erasing Backdoor Triggers from Deep Neural Networks
Jan 27, 2021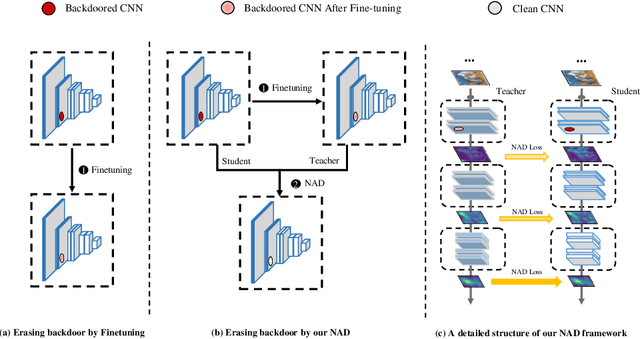
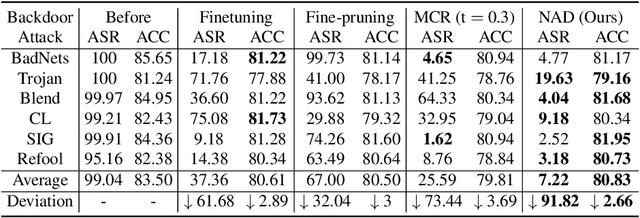
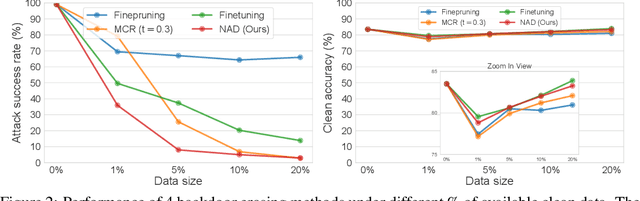
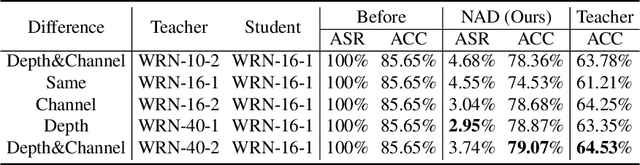
Deep neural networks (DNNs) are known vulnerable to backdoor attacks, a training time attack that injects a trigger pattern into a small proportion of training data so as to control the model's prediction at the test time. Backdoor attacks are notably dangerous since they do not affect the model's performance on clean examples, yet can fool the model to make incorrect prediction whenever the trigger pattern appears during testing. In this paper, we propose a novel defense framework Neural Attention Distillation (NAD) to erase backdoor triggers from backdoored DNNs. NAD utilizes a teacher network to guide the finetuning of the backdoored student network on a small clean subset of data such that the intermediate-layer attention of the student network aligns with that of the teacher network. The teacher network can be obtained by an independent finetuning process on the same clean subset. We empirically show, against 6 state-of-the-art backdoor attacks, NAD can effectively erase the backdoor triggers using only 5\% clean training data without causing obvious performance degradation on clean examples. Code is available in https://github.com/bboylyg/NAD.
Financial Trading Model with Stock Bar Chart Image Time Series with Deep Convolutional Neural Networks
Mar 11, 2019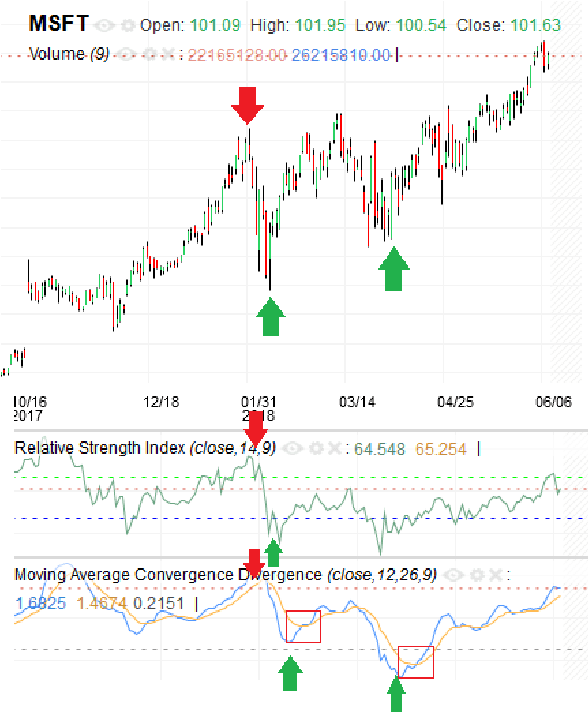
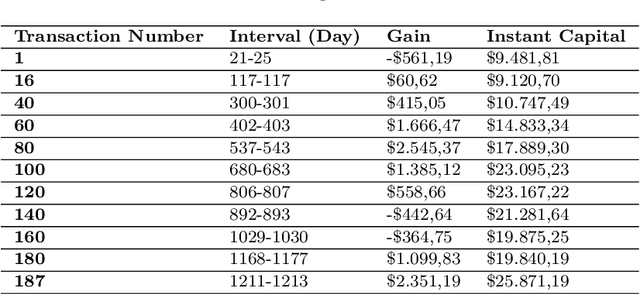
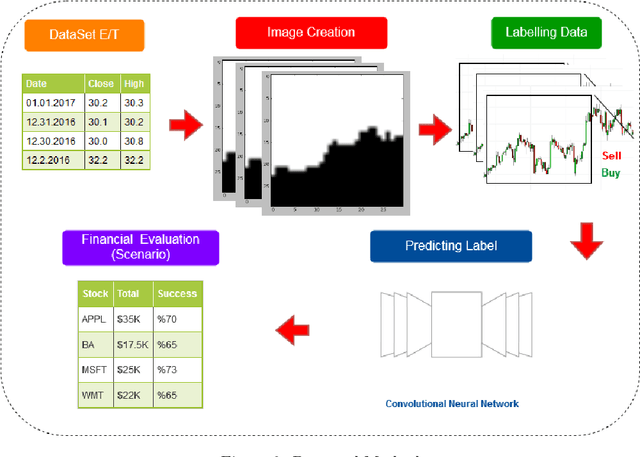
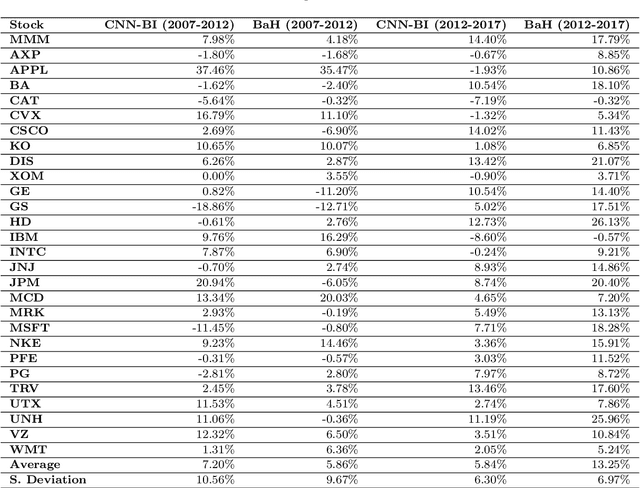
Even though computational intelligence techniques have been extensively utilized in financial trading systems, almost all developed models use the time series data for price prediction or identifying buy-sell points. However, in this study we decided to use 2-D stock bar chart images directly without introducing any additional time series associated with the underlying stock. We propose a novel algorithmic trading model CNN-BI (Convolutional Neural Network with Bar Images) using a 2-D Convolutional Neural Network. We generated 2-D images of sliding windows of 30-day bar charts for Dow 30 stocks and trained a deep Convolutional Neural Network (CNN) model for our algorithmic trading model. We tested our model separately between 2007-2012 and 2012-2017 for representing different market conditions. The results indicate that the model was able to outperform Buy and Hold strategy, especially in trendless or bear markets. Since this is a preliminary study and probably one of the first attempts using such an unconventional approach, there is always potential for improvement. Overall, the results are promising and the model might be integrated as part of an ensemble trading model combined with different strategies.