 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeELLIPSE: Evidential Learning for Robust Waypoints and Uncertainties
Mar 04, 2026Robust waypoint prediction is crucial for mobile robots operating in open-world, safety-critical settings. While Imitation Learning (IL) methods have demonstrated great success in practice, they are susceptible to distribution shifts: the policy can become dangerously overconfident in unfamiliar states. In this paper, we present \textit{ELLIPSE}, a method building on multivariate deep evidential regression to output waypoints and multivariate Student-t predictive distributions in a single forward pass. To reduce covariate-shift-induced overconfidence under viewpoint and pose perturbations near expert trajectories, we introduce a lightweight domain augmentation procedure that synthesizes plausible viewpoint/pose variations without collecting additional demonstrations. To improve uncertainty reliability under environment/domain shift (e.g., unseen staircases), we apply a post-hoc isotonic recalibration on probability integral transform (PIT) values so that prediction sets remain plausible during deployment. We ground the discussion and experiments in staircase waypoint prediction, where obtaining robust waypoint and uncertainty is pivotal. Extensive real world evaluations show that \textit{ELLIPSE} improves both task success rate and uncertainty coverage compared to baselines.
Learning Smooth State-Dependent Traversability from Dense Point Clouds
Jun 04, 2025A key open challenge in off-road autonomy is that the traversability of terrain often depends on the vehicle's state. In particular, some obstacles are only traversable from some orientations. However, learning this interaction by encoding the angle of approach as a model input demands a large and diverse training dataset and is computationally inefficient during planning due to repeated model inference. To address these challenges, we present SPARTA, a method for estimating approach angle conditioned traversability from point clouds. Specifically, we impose geometric structure into our network by outputting a smooth analytical function over the 1-Sphere that predicts risk distribution for any angle of approach with minimal overhead and can be reused for subsequent queries. The function is composed of Fourier basis functions, which has important advantages for generalization due to their periodic nature and smoothness. We demonstrate SPARTA both in a high-fidelity simulation platform, where our model achieves a 91\% success rate crossing a 40m boulder field (compared to 73\% for the baseline), and on hardware, illustrating the generalization ability of the model to real-world settings.
Proto-FG3D: Prototype-based Interpretable Fine-Grained 3D Shape Classification
May 23, 2025Deep learning-based multi-view coarse-grained 3D shape classification has achieved remarkable success over the past decade, leveraging the powerful feature learning capabilities of CNN-based and ViT-based backbones. However, as a challenging research area critical for detailed shape understanding, fine-grained 3D classification remains understudied due to the limited discriminative information captured during multi-view feature aggregation, particularly for subtle inter-class variations, class imbalance, and inherent interpretability limitations of parametric model. To address these problems, we propose the first prototype-based framework named Proto-FG3D for fine-grained 3D shape classification, achieving a paradigm shift from parametric softmax to non-parametric prototype learning. Firstly, Proto-FG3D establishes joint multi-view and multi-category representation learning via Prototype Association. Secondly, prototypes are refined via Online Clustering, improving both the robustness of multi-view feature allocation and inter-subclass balance. Finally, prototype-guided supervised learning is established to enhance fine-grained discrimination via prototype-view correlation analysis and enables ad-hoc interpretability through transparent case-based reasoning. Experiments on FG3D and ModelNet40 show Proto-FG3D surpasses state-of-the-art methods in accuracy, transparent predictions, and ad-hoc interpretability with visualizations, challenging conventional fine-grained 3D recognition approaches.
Robot Deformable Object Manipulation via NMPC-generated Demonstrations in Deep Reinforcement Learning
Feb 17, 2025In this work, we conducted research on deformable object manipulation by robots based on demonstration-enhanced reinforcement learning (RL). To improve the learning efficiency of RL, we enhanced the utilization of demonstration data from multiple aspects and proposed the HGCR-DDPG algorithm. It uses a novel high-dimensional fuzzy approach for grasping-point selection, a refined behavior-cloning method to enhance data-driven learning in Rainbow-DDPG, and a sequential policy-learning strategy. Compared to the baseline algorithm (Rainbow-DDPG), our proposed HGCR-DDPG achieved 2.01 times the global average reward and reduced the global average standard deviation to 45% of that of the baseline algorithm. To reduce the human labor cost of demonstration collection, we proposed a low-cost demonstration collection method based on Nonlinear Model Predictive Control (NMPC). Simulation experiment results show that demonstrations collected through NMPC can be used to train HGCR-DDPG, achieving comparable results to those obtained with human demonstrations. To validate the feasibility of our proposed methods in real-world environments, we conducted physical experiments involving deformable object manipulation. We manipulated fabric to perform three tasks: diagonal folding, central axis folding, and flattening. The experimental results demonstrate that our proposed method achieved success rates of 83.3%, 80%, and 100% for these three tasks, respectively, validating the effectiveness of our approach. Compared to current large-model approaches for robot manipulation, the proposed algorithm is lightweight, requires fewer computational resources, and offers task-specific customization and efficient adaptability for specific tasks.
LiDAR Inertial Odometry And Mapping Using Learned Registration-Relevant Features
Oct 03, 2024SLAM is an important capability for many autonomous systems, and modern LiDAR-based methods offer promising performance. However, for long duration missions, existing works that either operate directly the full pointclouds or on extracted features face key tradeoffs in accuracy and computational efficiency (e.g., memory consumption). To address these issues, this paper presents DFLIOM with several key innovations. Unlike previous methods that rely on handcrafted heuristics and hand-tuned parameters for feature extraction, we propose a learning-based approach that select points relevant to LiDAR SLAM pointcloud registration. Furthermore, we extend our prior work DLIOM with the learned feature extractor and observe our method enables similar or even better localization performance using only about 20\% of the points in the dense point clouds. We demonstrate that DFLIOM performs well on multiple public benchmarks, achieving a 2.4\% decrease in localization error and 57.5\% decrease in memory usage compared to state-of-the-art methods (DLIOM). Although extracting features with the proposed network requires extra time, it is offset by the faster processing time downstream, thus maintaining real-time performance using 20Hz LiDAR on our hardware setup. The effectiveness of our learning-based feature extraction module is further demonstrated through comparison with several handcrafted feature extractors.
OrbitGrasp: $SE(3)$-Equivariant Grasp Learning
Jul 03, 2024



While grasp detection is an important part of any robotic manipulation pipeline, reliable and accurate grasp detection in $SE(3)$ remains a research challenge. Many robotics applications in unstructured environments such as the home or warehouse would benefit a lot from better grasp performance. This paper proposes a novel framework for detecting $SE(3)$ grasp poses based on point cloud input. Our main contribution is to propose an $SE(3)$-equivariant model that maps each point in the cloud to a continuous grasp quality function over the 2-sphere $S^2$ using a spherical harmonic basis. Compared with reasoning about a finite set of samples, this formulation improves the accuracy and efficiency of our model when a large number of samples would otherwise be needed. In order to accomplish this, we propose a novel variation on EquiFormerV2 that leverages a UNet-style backbone to enlarge the number of points the model can handle. Our resulting method, which we name $\textit{OrbitGrasp}$, significantly outperforms baselines in both simulation and physical experiments.
Collision Avoidance Verification of Multiagent Systems with Learned Policies
Mar 05, 2024For many multiagent control problems, neural networks (NNs) have enabled promising new capabilities. However, many of these systems lack formal guarantees (e.g., collision avoidance, robustness), which prevents leveraging these advances in safety-critical settings. While there is recent work on formal verification of NN-controlled systems, most existing techniques cannot handle scenarios with more than one agent. To address this research gap, this paper presents a backward reachability-based approach for verifying the collision avoidance properties of Multi-Agent Neural Feedback Loops (MA-NFLs). Given the dynamics models and trained control policies of each agent, the proposed algorithm computes relative backprojection sets by solving a series of Mixed Integer Linear Programs (MILPs) offline for each pair of agents. Our pair-wise approach is parallelizable and thus scales well with increasing number of agents, and we account for state measurement uncertainties, making it well aligned with real-world scenarios. Using those results, the agents can quickly check for collision avoidance online by solving low-dimensional Linear Programs (LPs). We demonstrate the proposed algorithm can verify collision-free properties of a MA-NFL with agents trained to imitate a collision avoidance algorithm (Reciprocal Velocity Obstacles). We further demonstrate the computational scalability of the approach on systems with up to 10 agents.
Hard Label Black Box Node Injection Attack on Graph Neural Networks
Nov 22, 2023



While graph neural networks have achieved state-of-the-art performances in many real-world tasks including graph classification and node classification, recent works have demonstrated they are also extremely vulnerable to adversarial attacks. Most previous works have focused on attacking node classification networks under impractical white-box scenarios. In this work, we will propose a non-targeted Hard Label Black Box Node Injection Attack on Graph Neural Networks, which to the best of our knowledge, is the first of its kind. Under this setting, more real world tasks can be studied because our attack assumes no prior knowledge about (1): the model architecture of the GNN we are attacking; (2): the model's gradients; (3): the output logits of the target GNN model. Our attack is based on an existing edge perturbation attack, from which we restrict the optimization process to formulate a node injection attack. In the work, we will evaluate the performance of the attack using three datasets, COIL-DEL, IMDB-BINARY, and NCI1.
A Good Representation Detects Noisy Labels
Oct 12, 2021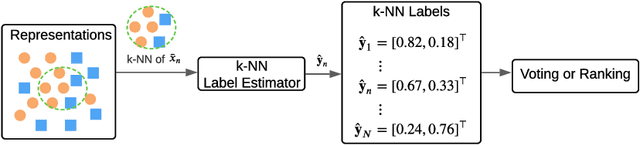
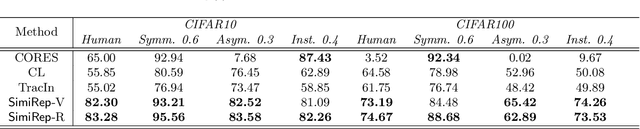
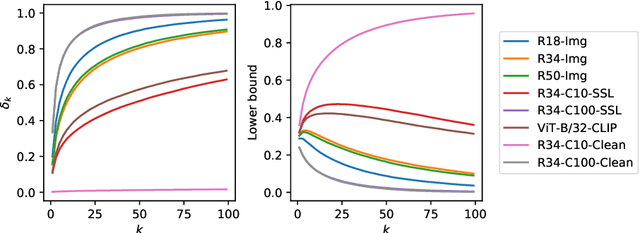

Label noise is pervasive in real-world datasets, which encodes wrong correlation patterns and impairs the generalization of deep neural networks (DNNs). It is critical to find efficient ways to detect the corrupted patterns. Current methods primarily focus on designing robust training techniques to prevent DNNs from memorizing corrupted patterns. This approach has two outstanding caveats: 1) applying this approach to each individual dataset would often require customized training processes; 2) as long as the model is trained with noisy supervisions, overfitting to corrupted patterns is often hard to avoid, leading to performance drop in detection. In this paper, given good representations, we propose a universally applicable and training-free solution to detect noisy labels. Intuitively, good representations help define ``neighbors'' of each training instance, and closer instances are more likely to share the same clean label. Based on the neighborhood information, we propose two methods: the first one uses ``local voting" via checking the noisy label consensuses of nearby representations. The second one is a ranking-based approach that scores each instance and filters out a guaranteed number of instances that are likely to be corrupted, again using only representations. Given good (but possibly imperfect) representations that are commonly available in practice, we theoretically analyze how they affect the local voting and provide guidelines for tuning neighborhood size. We also prove the worst-case error bound for the ranking-based method. Experiments with both synthetic and real-world label noise demonstrate our training-free solutions are consistently and significantly improving over most of the training-based baselines. Code is available at github.com/UCSC-REAL/SimiRep.