 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeNon-Intrusive Graph-Based Bot Detection for E-Commerce Using Inductive Graph Neural Networks
Jan 30, 2026Malicious bots pose a growing threat to e-commerce platforms by scraping data, hoarding inventory, and perpetrating fraud. Traditional bot mitigation techniques, including IP blacklists and CAPTCHA-based challenges, are increasingly ineffective or intrusive, as modern bots leverage proxies, botnets, and AI-assisted evasion strategies. This work proposes a non-intrusive graph-based bot detection framework for e-commerce that models user session behavior through a graph representation and applies an inductive graph neural network for classification. The approach captures both relational structure and behavioral semantics, enabling accurate identification of subtle automated activity that evades feature-based methods. Experiments on real-world e-commerce traffic demonstrate that the proposed inductive graph model outperforms a strong session-level multilayer perceptron baseline in terms of AUC and F1 score. Additional adversarial perturbation and cold-start simulations show that the model remains robust under moderate graph modifications and generalizes effectively to previously unseen sessions and URLs. The proposed framework is deployment-friendly, integrates with existing systems without client-side instrumentation, and supports real-time inference and incremental updates, making it suitable for practical e-commerce security deployments.
Resilient Routing: Risk-Aware Dynamic Routing in Smart Logistics via Spatiotemporal Graph Learning
Jan 20, 2026With the rapid development of the e-commerce industry, the logistics network is experiencing unprecedented pressure. The traditional static routing strategy most time cannot tolerate the traffic congestion and fluctuating retail demand. In this paper, we propose a Risk-Aware Dynamic Routing(RADR) framework which integrates Spatiotemporal Graph Neural Networks (ST-GNN) with combinatorial optimization. We first construct a logistics topology graph by using the discrete GPS data using spatial clustering methods. Subsequently, a hybrid deep learning model combining Graph Convolutional Network (GCN) and Gated Recurrent Unit (GRU) is adopted to extract spatial correlations and temporal dependencies for predicting future congestion risks. These prediction results are then integrated into a dynamic edge weight mechanism to perform path planning. We evaluated the framework on the Smart Logistics Dataset 2024, which contains real-world Internet of Things(IoT) sensor data. The experimental results show that the RADR algorithm significantly enhances the resilience of the supply chain. Particularly in the case study of high congestion scenarios, our method reduces the potential congestion risk exposure by 19.3% while only increasing the transportation distance by 2.1%. This empirical evidence confirms that the proposed data-driven approach can effectively balance delivery efficiency and operational safety.
Sequential Stochastic Combinatorial Optimization Using Hierarchal Reinforcement Learning
Feb 08, 2025Reinforcement learning (RL) has emerged as a promising tool for combinatorial optimization (CO) problems due to its ability to learn fast, effective, and generalizable solutions. Nonetheless, existing works mostly focus on one-shot deterministic CO, while sequential stochastic CO (SSCO) has rarely been studied despite its broad applications such as adaptive influence maximization (IM) and infectious disease intervention. In this paper, we study the SSCO problem where we first decide the budget (e.g., number of seed nodes in adaptive IM) allocation for all time steps, and then select a set of nodes for each time step. The few existing studies on SSCO simplify the problems by assuming a uniformly distributed budget allocation over the time horizon, yielding suboptimal solutions. We propose a generic hierarchical RL (HRL) framework called wake-sleep option (WS-option), a two-layer option-based framework that simultaneously decides adaptive budget allocation on the higher layer and node selection on the lower layer. WS-option starts with a coherent formulation of the two-layer Markov decision processes (MDPs), capturing the interdependencies between the two layers of decisions. Building on this, WS-option employs several innovative designs to balance the model's training stability and computational efficiency, preventing the vicious cyclic interference issue between the two layers. Empirical results show that WS-option exhibits significantly improved effectiveness and generalizability compared to traditional methods. Moreover, the learned model can be generalized to larger graphs, which significantly reduces the overhead of computational resources.
Symbolic regression via MDLformer-guided search: from minimizing prediction error to minimizing description length
Nov 06, 2024



Symbolic regression, a task discovering the formula best fitting the given data, is typically based on the heuristical search. These methods usually update candidate formulas to obtain new ones with lower prediction errors iteratively. However, since formulas with similar function shapes may have completely different symbolic forms, the prediction error does not decrease monotonously as the search approaches the target formula, causing the low recovery rate of existing methods. To solve this problem, we propose a novel search objective based on the minimum description length, which reflects the distance from the target and decreases monotonically as the search approaches the correct form of the target formula. To estimate the minimum description length of any input data, we design a neural network, MDLformer, which enables robust and scalable estimation through large-scale training. With the MDLformer's output as the search objective, we implement a symbolic regression method, SR4MDL, that can effectively recover the correct mathematical form of the formula. Extensive experiments illustrate its excellent performance in recovering formulas from data. Our method successfully recovers around 50 formulas across two benchmark datasets comprising 133 problems, outperforming state-of-the-art methods by 43.92%.
Exploring Foundation Models in Remote Sensing Image Change Detection: A Comprehensive Survey
Oct 10, 2024Change detection, as an important and widely applied technique in the field of remote sensing, aims to analyze changes in surface areas over time and has broad applications in areas such as environmental monitoring, urban development, and land use analysis.In recent years, deep learning, especially the development of foundation models, has provided more powerful solutions for feature extraction and data fusion, effectively addressing these complexities. This paper systematically reviews the latest advancements in the field of change detection, with a focus on the application of foundation models in remote sensing tasks.
Stochastic Parrots or ICU Experts? Large Language Models in Critical Care Medicine: A Scoping Review
Jul 27, 2024With the rapid development of artificial intelligence (AI), large language models (LLMs) have shown strong capabilities in natural language understanding, reasoning, and generation, attracting amounts of research interest in applying LLMs to health and medicine. Critical care medicine (CCM) provides diagnosis and treatment for critically ill patients who often require intensive monitoring and interventions in intensive care units (ICUs). Can LLMs be applied to CCM? Are LLMs just like stochastic parrots or ICU experts in assisting clinical decision-making? This scoping review aims to provide a panoramic portrait of the application of LLMs in CCM. Literature in seven databases, including PubMed, Embase, Scopus, Web of Science, CINAHL, IEEE Xplore, and ACM Digital Library, were searched from January 1, 2019, to June 10, 2024. Peer-reviewed journal and conference articles that discussed the application of LLMs in critical care settings were included. From an initial 619 articles, 24 were selected for final review. This review grouped applications of LLMs in CCM into three categories: clinical decision support, medical documentation and reporting, and medical education and doctor-patient communication. LLMs have advantages in handling unstructured data and do not require manual feature engineering. Meanwhile, applying LLMs to CCM faces challenges, including hallucinations, poor interpretability, bias and alignment challenges, and privacy and ethics issues. Future research should enhance model reliability and interpretability, integrate up-to-date medical knowledge, and strengthen privacy and ethical guidelines. As LLMs evolve, they could become key tools in CCM to help improve patient outcomes and optimize healthcare delivery. This study is the first review of LLMs in CCM, aiding researchers, clinicians, and policymakers to understand the current status and future potentials of LLMs in CCM.
Artificial Intelligence for Complex Network: Potential, Methodology and Application
Feb 23, 2024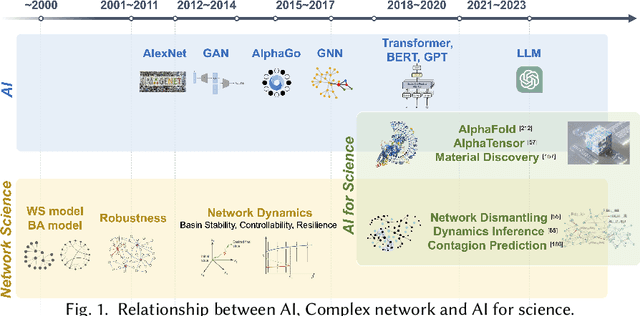
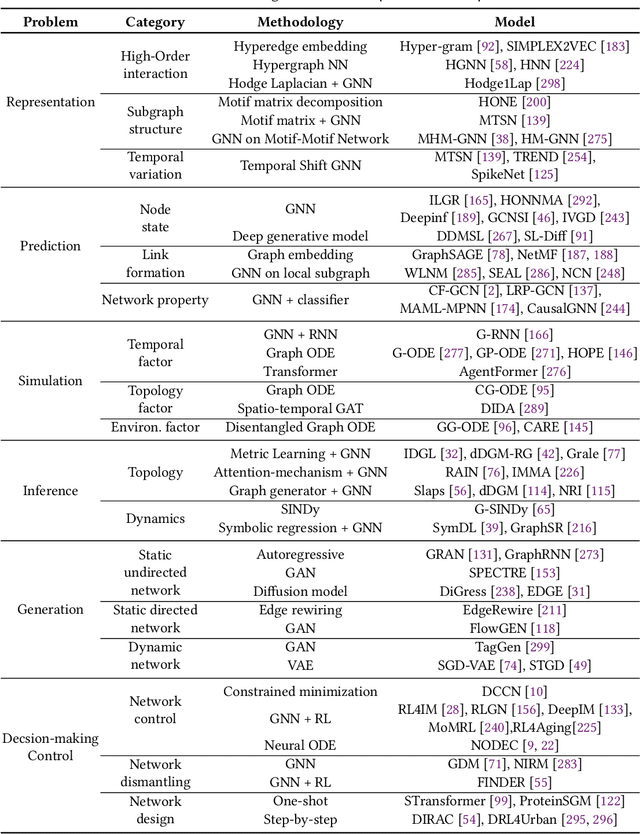
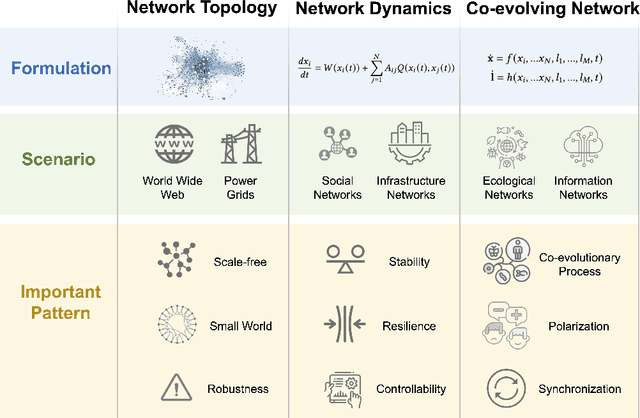
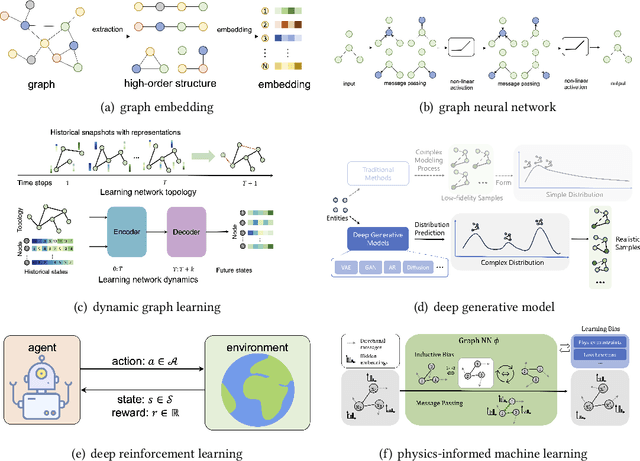
Complex networks pervade various real-world systems, from the natural environment to human societies. The essence of these networks is in their ability to transition and evolve from microscopic disorder-where network topology and node dynamics intertwine-to a macroscopic order characterized by certain collective behaviors. Over the past two decades, complex network science has significantly enhanced our understanding of the statistical mechanics, structures, and dynamics underlying real-world networks. Despite these advancements, there remain considerable challenges in exploring more realistic systems and enhancing practical applications. The emergence of artificial intelligence (AI) technologies, coupled with the abundance of diverse real-world network data, has heralded a new era in complex network science research. This survey aims to systematically address the potential advantages of AI in overcoming the lingering challenges of complex network research. It endeavors to summarize the pivotal research problems and provide an exhaustive review of the corresponding methodologies and applications. Through this comprehensive survey-the first of its kind on AI for complex networks-we expect to provide valuable insights that will drive further research and advancement in this interdisciplinary field.
Neural Trajectory Model: Implicit Neural Trajectory Representation for Trajectories Generation
Feb 02, 2024Trajectory planning is a fundamental problem in robotics. It facilitates a wide range of applications in navigation and motion planning, control, and multi-agent coordination. Trajectory planning is a difficult problem due to its computational complexity and real-world environment complexity with uncertainty, non-linearity, and real-time requirements. The multi-agent trajectory planning problem adds another dimension of difficulty due to inter-agent interaction. Existing solutions are either search-based or optimization-based approaches with simplified assumptions of environment, limited planning speed, and limited scalability in the number of agents. In this work, we make the first attempt to reformulate single agent and multi-agent trajectory planning problem as query problems over an implicit neural representation of trajectories. We formulate such implicit representation as Neural Trajectory Models (NTM) which can be queried to generate nearly optimal trajectory in complex environments. We conduct experiments in simulation environments and demonstrate that NTM can solve single-agent and multi-agent trajectory planning problems. In the experiments, NTMs achieve (1) sub-millisecond panning time using GPUs, (2) almost avoiding all environment collision, (3) almost avoiding all inter-agent collision, and (4) generating almost shortest paths. We also demonstrate that the same NTM framework can also be used for trajectories correction and multi-trajectory conflict resolution refining low quality and conflicting multi-agent trajectories into nearly optimal solutions efficiently. (Open source code will be available at https://github.com/laser2099/neural-trajectory-model)
Towards Better Chain-of-Thought Prompting Strategies: A Survey
Oct 08, 2023Chain-of-Thought (CoT), a step-wise and coherent reasoning chain, shows its impressive strength when used as a prompting strategy for large language models (LLM). Recent years, the prominent effect of CoT prompting has attracted emerging research. However, there still lacks of a systematic summary about key factors of CoT prompting and comprehensive guide for prompts utilizing. For a deeper understanding about CoT prompting, we survey on a wide range of current research, presenting a systematic and comprehensive analysis on several factors that may influence the effect of CoT prompting, and introduce how to better apply it in different applications under these discussions. We further analyze the challenges and propose some future directions about CoT prompting. This survey could provide an overall reference on related research.
EquiDiff: A Conditional Equivariant Diffusion Model For Trajectory Prediction
Aug 29, 2023



Accurate trajectory prediction is crucial for the safe and efficient operation of autonomous vehicles. The growing popularity of deep learning has led to the development of numerous methods for trajectory prediction. While deterministic deep learning models have been widely used, deep generative models have gained popularity as they learn data distributions from training data and account for trajectory uncertainties. In this study, we propose EquiDiff, a deep generative model for predicting future vehicle trajectories. EquiDiff is based on the conditional diffusion model, which generates future trajectories by incorporating historical information and random Gaussian noise. The backbone model of EquiDiff is an SO(2)-equivariant transformer that fully utilizes the geometric properties of location coordinates. In addition, we employ Recurrent Neural Networks and Graph Attention Networks to extract social interactions from historical trajectories. To evaluate the performance of EquiDiff, we conduct extensive experiments on the NGSIM dataset. Our results demonstrate that EquiDiff outperforms other baseline models in short-term prediction, but has slightly higher errors for long-term prediction. Furthermore, we conduct an ablation study to investigate the contribution of each component of EquiDiff to the prediction accuracy. Additionally, we present a visualization of the generation process of our diffusion model, providing insights into the uncertainty of the prediction.