 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEndoGen: Conditional Autoregressive Endoscopic Video Generation
Jul 23, 2025Endoscopic video generation is crucial for advancing medical imaging and enhancing diagnostic capabilities. However, prior efforts in this field have either focused on static images, lacking the dynamic context required for practical applications, or have relied on unconditional generation that fails to provide meaningful references for clinicians. Therefore, in this paper, we propose the first conditional endoscopic video generation framework, namely EndoGen. Specifically, we build an autoregressive model with a tailored Spatiotemporal Grid-Frame Patterning (SGP) strategy. It reformulates the learning of generating multiple frames as a grid-based image generation pattern, which effectively capitalizes the inherent global dependency modeling capabilities of autoregressive architectures. Furthermore, we propose a Semantic-Aware Token Masking (SAT) mechanism, which enhances the model's ability to produce rich and diverse content by selectively focusing on semantically meaningful regions during the generation process. Through extensive experiments, we demonstrate the effectiveness of our framework in generating high-quality, conditionally guided endoscopic content, and improves the performance of downstream task of polyp segmentation. Code released at https://www.github.com/CUHK-AIM-Group/EndoGen.
Age Sensitive Hippocampal Functional Connectivity: New Insights from 3D CNNs and Saliency Mapping
Jul 02, 2025Grey matter loss in the hippocampus is a hallmark of neurobiological aging, yet understanding the corresponding changes in its functional connectivity remains limited. Seed-based functional connectivity (FC) analysis enables voxel-wise mapping of the hippocampus's synchronous activity with cortical regions, offering a window into functional reorganization during aging. In this study, we develop an interpretable deep learning framework to predict brain age from hippocampal FC using a three-dimensional convolutional neural network (3D CNN) combined with LayerCAM saliency mapping. This approach maps key hippocampal-cortical connections, particularly with the precuneus, cuneus, posterior cingulate cortex, parahippocampal cortex, left superior parietal lobule, and right superior temporal sulcus, that are highly sensitive to age. Critically, disaggregating anterior and posterior hippocampal FC reveals distinct mapping aligned with their known functional specializations. These findings provide new insights into the functional mechanisms of hippocampal aging and demonstrate the power of explainable deep learning to uncover biologically meaningful patterns in neuroimaging data.
RadFabric: Agentic AI System with Reasoning Capability for Radiology
Jun 17, 2025Chest X ray (CXR) imaging remains a critical diagnostic tool for thoracic conditions, but current automated systems face limitations in pathology coverage, diagnostic accuracy, and integration of visual and textual reasoning. To address these gaps, we propose RadFabric, a multi agent, multimodal reasoning framework that unifies visual and textual analysis for comprehensive CXR interpretation. RadFabric is built on the Model Context Protocol (MCP), enabling modularity, interoperability, and scalability for seamless integration of new diagnostic agents. The system employs specialized CXR agents for pathology detection, an Anatomical Interpretation Agent to map visual findings to precise anatomical structures, and a Reasoning Agent powered by large multimodal reasoning models to synthesize visual, anatomical, and clinical data into transparent and evidence based diagnoses. RadFabric achieves significant performance improvements, with near-perfect detection of challenging pathologies like fractures (1.000 accuracy) and superior overall diagnostic accuracy (0.799) compared to traditional systems (0.229 to 0.527). By integrating cross modal feature alignment and preference-driven reasoning, RadFabric advances AI-driven radiology toward transparent, anatomically precise, and clinically actionable CXR analysis.
Voxel-Level Brain States Prediction Using Swin Transformer
Jun 13, 2025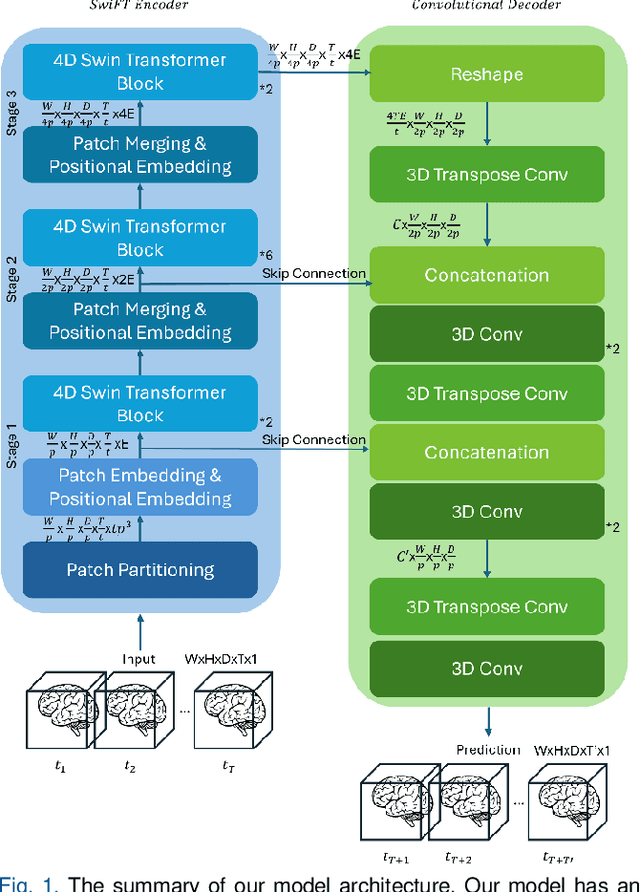

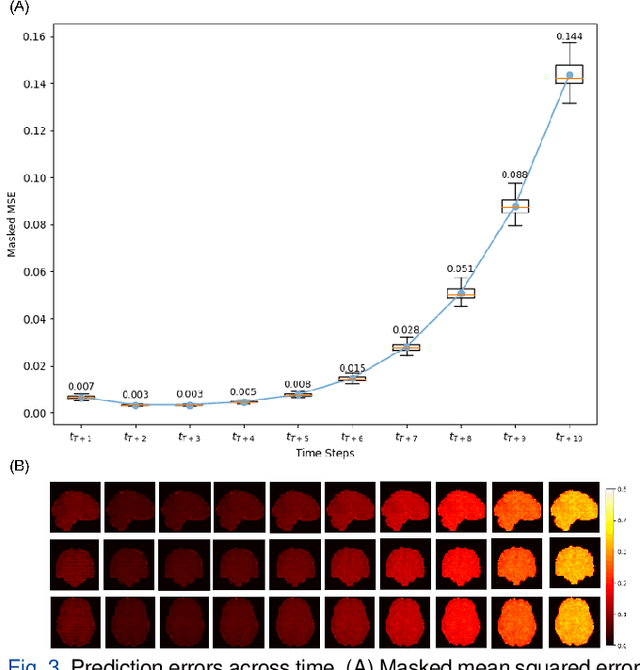

Understanding brain dynamics is important for neuroscience and mental health. Functional magnetic resonance imaging (fMRI) enables the measurement of neural activities through blood-oxygen-level-dependent (BOLD) signals, which represent brain states. In this study, we aim to predict future human resting brain states with fMRI. Due to the 3D voxel-wise spatial organization and temporal dependencies of the fMRI data, we propose a novel architecture which employs a 4D Shifted Window (Swin) Transformer as encoder to efficiently learn spatio-temporal information and a convolutional decoder to enable brain state prediction at the same spatial and temporal resolution as the input fMRI data. We used 100 unrelated subjects from the Human Connectome Project (HCP) for model training and testing. Our novel model has shown high accuracy when predicting 7.2s resting-state brain activities based on the prior 23.04s fMRI time series. The predicted brain states highly resemble BOLD contrast and dynamics. This work shows promising evidence that the spatiotemporal organization of the human brain can be learned by a Swin Transformer model, at high resolution, which provides a potential for reducing the fMRI scan time and the development of brain-computer interfaces in the future.
Towards a general-purpose foundation model for fMRI analysis
Jun 11, 2025



Functional Magnetic Resonance Imaging (fMRI) is essential for studying brain function and diagnosing neurological disorders, but current analysis methods face reproducibility and transferability issues due to complex pre-processing and task-specific models. We introduce NeuroSTORM (Neuroimaging Foundation Model with Spatial-Temporal Optimized Representation Modeling), a generalizable framework that directly learns from 4D fMRI volumes and enables efficient knowledge transfer across diverse applications. NeuroSTORM is pre-trained on 28.65 million fMRI frames (>9,000 hours) from over 50,000 subjects across multiple centers and ages 5 to 100. Using a Mamba backbone and a shifted scanning strategy, it efficiently processes full 4D volumes. We also propose a spatial-temporal optimized pre-training approach and task-specific prompt tuning to improve transferability. NeuroSTORM outperforms existing methods across five tasks: age/gender prediction, phenotype prediction, disease diagnosis, fMRI-to-image retrieval, and task-based fMRI classification. It demonstrates strong clinical utility on datasets from hospitals in the U.S., South Korea, and Australia, achieving top performance in disease diagnosis and cognitive phenotype prediction. NeuroSTORM provides a standardized, open-source foundation model to improve reproducibility and transferability in fMRI-based clinical research.
Track Any Anomalous Object: A Granular Video Anomaly Detection Pipeline
Jun 05, 2025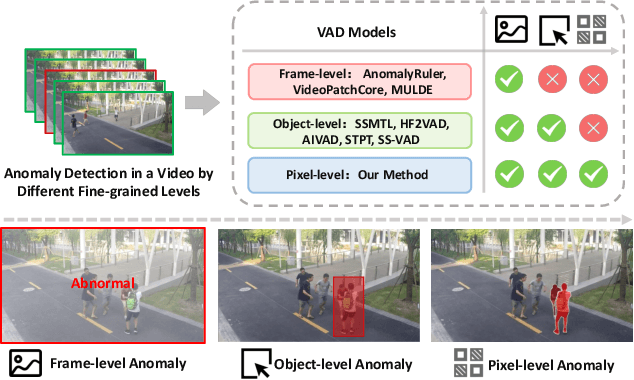
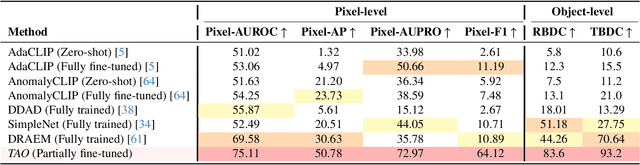
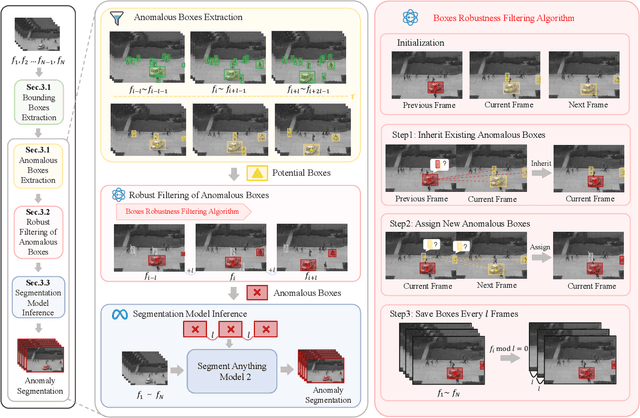
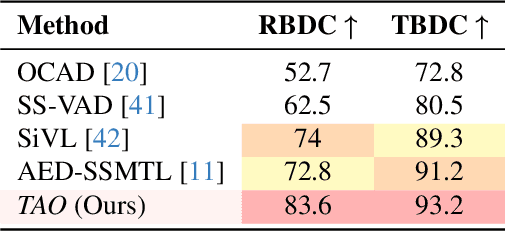
Video anomaly detection (VAD) is crucial in scenarios such as surveillance and autonomous driving, where timely detection of unexpected activities is essential. Although existing methods have primarily focused on detecting anomalous objects in videos -- either by identifying anomalous frames or objects -- they often neglect finer-grained analysis, such as anomalous pixels, which limits their ability to capture a broader range of anomalies. To address this challenge, we propose a new framework called Track Any Anomalous Object (TAO), which introduces a granular video anomaly detection pipeline that, for the first time, integrates the detection of multiple fine-grained anomalous objects into a unified framework. Unlike methods that assign anomaly scores to every pixel, our approach transforms the problem into pixel-level tracking of anomalous objects. By linking anomaly scores to downstream tasks such as segmentation and tracking, our method removes the need for threshold tuning and achieves more precise anomaly localization in long and complex video sequences. Experiments demonstrate that TAO sets new benchmarks in accuracy and robustness. Project page available online.
TumorGen: Boundary-Aware Tumor-Mask Synthesis with Rectified Flow Matching
May 30, 2025



Tumor data synthesis offers a promising solution to the shortage of annotated medical datasets. However, current approaches either limit tumor diversity by using predefined masks or employ computationally expensive two-stage processes with multiple denoising steps, causing computational inefficiency. Additionally, these methods typically rely on binary masks that fail to capture the gradual transitions characteristic of tumor boundaries. We present TumorGen, a novel Boundary-Aware Tumor-Mask Synthesis with Rectified Flow Matching for efficient 3D tumor synthesis with three key components: a Boundary-Aware Pseudo Mask Generation module that replaces strict binary masks with flexible bounding boxes; a Spatial-Constraint Vector Field Estimator that simultaneously synthesizes tumor latents and masks using rectified flow matching to ensure computational efficiency; and a VAE-guided mask refiner that enhances boundary realism. TumorGen significantly improves computational efficiency by requiring fewer sampling steps while maintaining pathological accuracy through coarse and fine-grained spatial constraints. Experimental results demonstrate TumorGen's superior performance over existing tumor synthesis methods in both efficiency and realism, offering a valuable contribution to AI-driven cancer diagnostics.
A Comprehensive Evaluation of Multi-Modal Large Language Models for Endoscopy Analysis
May 29, 2025
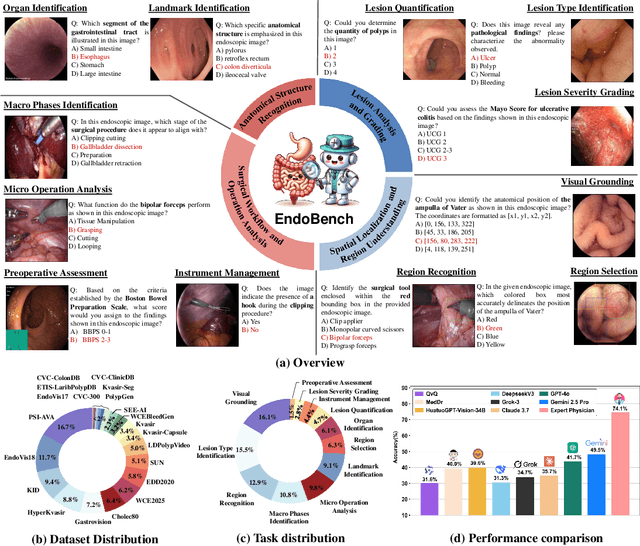


Endoscopic procedures are essential for diagnosing and treating internal diseases, and multi-modal large language models (MLLMs) are increasingly applied to assist in endoscopy analysis. However, current benchmarks are limited, as they typically cover specific endoscopic scenarios and a small set of clinical tasks, failing to capture the real-world diversity of endoscopic scenarios and the full range of skills needed in clinical workflows. To address these issues, we introduce EndoBench, the first comprehensive benchmark specifically designed to assess MLLMs across the full spectrum of endoscopic practice with multi-dimensional capacities. EndoBench encompasses 4 distinct endoscopic scenarios, 12 specialized clinical tasks with 12 secondary subtasks, and 5 levels of visual prompting granularities, resulting in 6,832 rigorously validated VQA pairs from 21 diverse datasets. Our multi-dimensional evaluation framework mirrors the clinical workflow--spanning anatomical recognition, lesion analysis, spatial localization, and surgical operations--to holistically gauge the perceptual and diagnostic abilities of MLLMs in realistic scenarios. We benchmark 23 state-of-the-art models, including general-purpose, medical-specialized, and proprietary MLLMs, and establish human clinician performance as a reference standard. Our extensive experiments reveal: (1) proprietary MLLMs outperform open-source and medical-specialized models overall, but still trail human experts; (2) medical-domain supervised fine-tuning substantially boosts task-specific accuracy; and (3) model performance remains sensitive to prompt format and clinical task complexity. EndoBench establishes a new standard for evaluating and advancing MLLMs in endoscopy, highlighting both progress and persistent gaps between current models and expert clinical reasoning. We publicly release our benchmark and code.
MonoSplat: Generalizable 3D Gaussian Splatting from Monocular Depth Foundation Models
May 21, 2025Recent advances in generalizable 3D Gaussian Splatting have demonstrated promising results in real-time high-fidelity rendering without per-scene optimization, yet existing approaches still struggle to handle unfamiliar visual content during inference on novel scenes due to limited generalizability. To address this challenge, we introduce MonoSplat, a novel framework that leverages rich visual priors from pre-trained monocular depth foundation models for robust Gaussian reconstruction. Our approach consists of two key components: a Mono-Multi Feature Adapter that transforms monocular features into multi-view representations, coupled with an Integrated Gaussian Prediction module that effectively fuses both feature types for precise Gaussian generation. Through the Adapter's lightweight attention mechanism, features are seamlessly aligned and aggregated across views while preserving valuable monocular priors, enabling the Prediction module to generate Gaussian primitives with accurate geometry and appearance. Through extensive experiments on diverse real-world datasets, we convincingly demonstrate that MonoSplat achieves superior reconstruction quality and generalization capability compared to existing methods while maintaining computational efficiency with minimal trainable parameters. Codes are available at https://github.com/CUHK-AIM-Group/MonoSplat.
X-GRM: Large Gaussian Reconstruction Model for Sparse-view X-rays to Computed Tomography
May 21, 2025



Computed Tomography serves as an indispensable tool in clinical workflows, providing non-invasive visualization of internal anatomical structures. Existing CT reconstruction works are limited to small-capacity model architecture, inflexible volume representation, and small-scale training data. In this paper, we present X-GRM (X-ray Gaussian Reconstruction Model), a large feedforward model for reconstructing 3D CT from sparse-view 2D X-ray projections. X-GRM employs a scalable transformer-based architecture to encode an arbitrary number of sparse X-ray inputs, where tokens from different views are integrated efficiently. Then, tokens are decoded into a new volume representation, named Voxel-based Gaussian Splatting (VoxGS), which enables efficient CT volume extraction and differentiable X-ray rendering. To support the training of X-GRM, we collect ReconX-15K, a large-scale CT reconstruction dataset containing around 15,000 CT/X-ray pairs across diverse organs, including the chest, abdomen, pelvis, and tooth etc. This combination of a high-capacity model, flexible volume representation, and large-scale training data empowers our model to produce high-quality reconstructions from various testing inputs, including in-domain and out-domain X-ray projections. Project Page: https://github.com/CUHK-AIM-Group/X-GRM.