 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeFine-grained Correlation Loss for Regression
Jul 01, 2022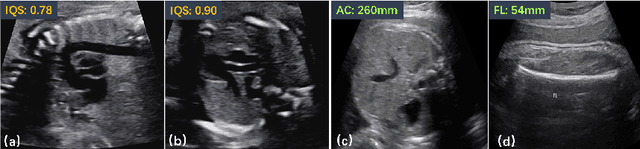
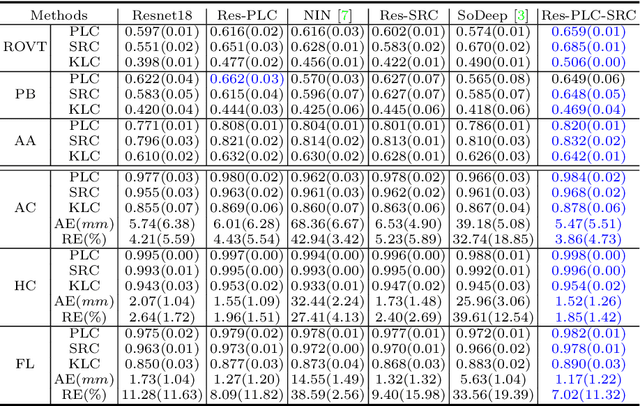
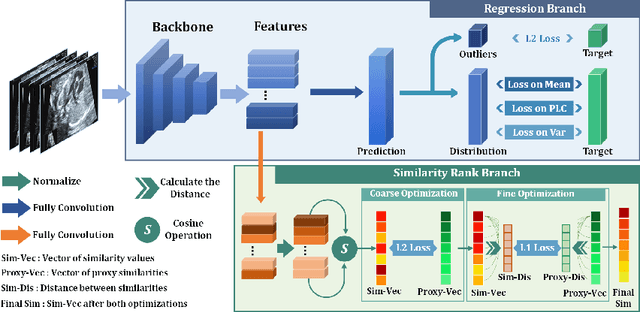
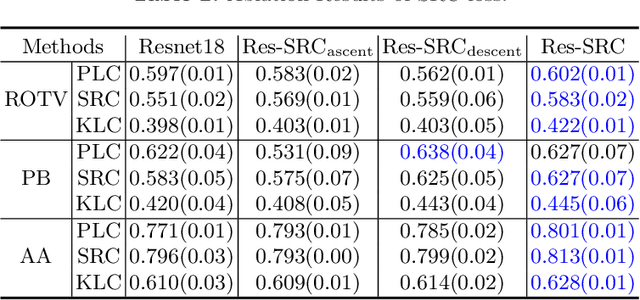
Regression learning is classic and fundamental for medical image analysis. It provides the continuous mapping for many critical applications, like the attribute estimation, object detection, segmentation and non-rigid registration. However, previous studies mainly took the case-wise criteria, like the mean square errors, as the optimization objectives. They ignored the very important population-wise correlation criterion, which is exactly the final evaluation metric in many tasks. In this work, we propose to revisit the classic regression tasks with novel investigations on directly optimizing the fine-grained correlation losses. We mainly explore two complementary correlation indexes as learnable losses: Pearson linear correlation (PLC) and Spearman rank correlation (SRC). The contributions of this paper are two folds. First, for the PLC on global level, we propose a strategy to make it robust against the outliers and regularize the key distribution factors. These efforts significantly stabilize the learning and magnify the efficacy of PLC. Second, for the SRC on local level, we propose a coarse-to-fine scheme to ease the learning of the exact ranking order among samples. Specifically, we convert the learning for the ranking of samples into the learning of similarity relationships among samples. We extensively validate our method on two typical ultrasound image regression tasks, including the image quality assessment and bio-metric measurement. Experiments prove that, with the fine-grained guidance in directly optimizing the correlation, the regression performances are significantly improved. Our proposed correlation losses are general and can be extended to more important applications.
Statistical Dependency Guided Contrastive Learning for Multiple Labeling in Prenatal Ultrasound
Aug 11, 2021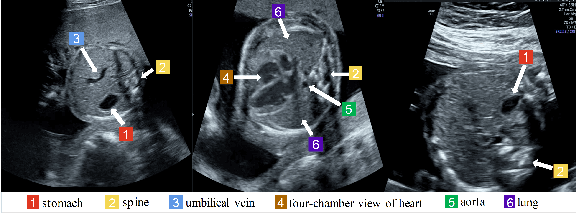
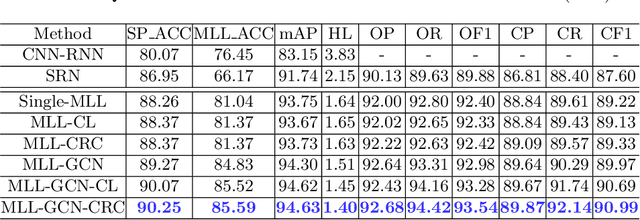
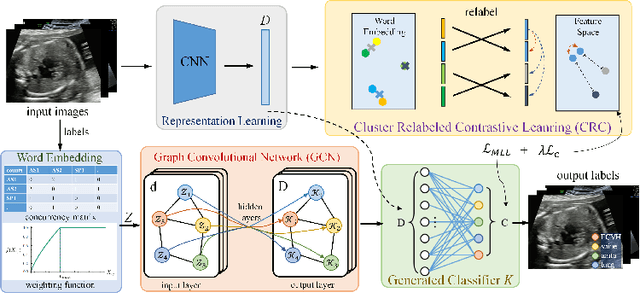
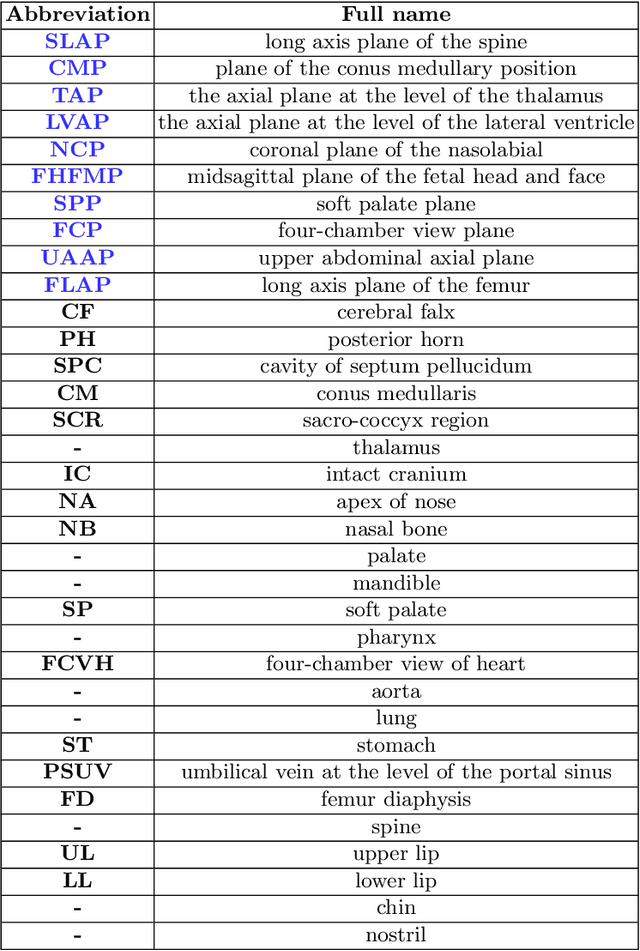
Standard plane recognition plays an important role in prenatal ultrasound (US) screening. Automatically recognizing the standard plane along with the corresponding anatomical structures in US image can not only facilitate US image interpretation but also improve diagnostic efficiency. In this study, we build a novel multi-label learning (MLL) scheme to identify multiple standard planes and corresponding anatomical structures of fetus simultaneously. Our contribution is three-fold. First, we represent the class correlation by word embeddings to capture the fine-grained semantic and latent statistical concurrency. Second, we equip the MLL with a graph convolutional network to explore the inner and outer relationship among categories. Third, we propose a novel cluster relabel-based contrastive learning algorithm to encourage the divergence among ambiguous classes. Extensive validation was performed on our large in-house dataset. Our approach reports the highest accuracy as 90.25% for standard planes labeling, 85.59% for planes and structures labeling and mAP as 94.63%. The proposed MLL scheme provides a novel perspective for standard plane recognition and can be easily extended to other medical image classification tasks.
Debiasing Samples from Online Learning Using Bootstrap
Jul 31, 2021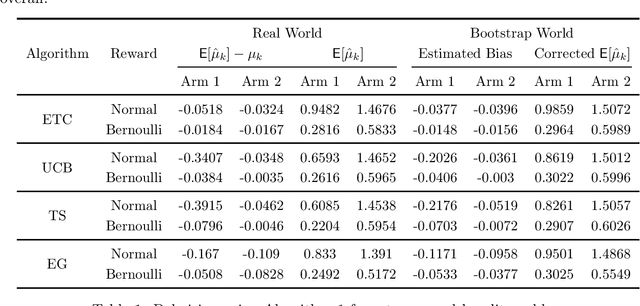
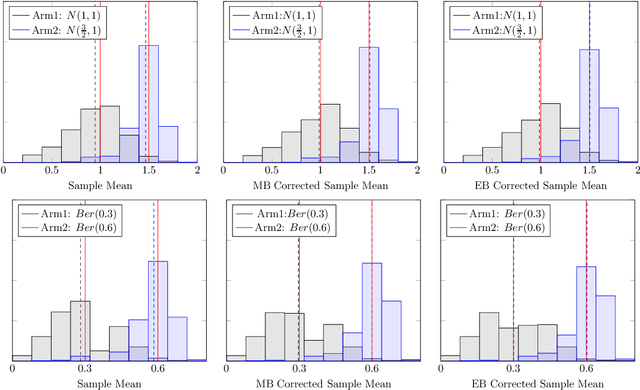
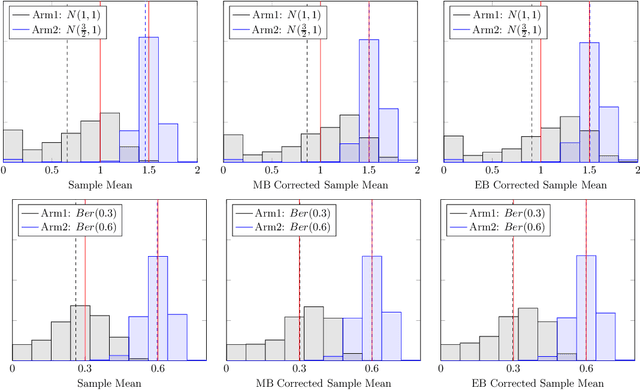
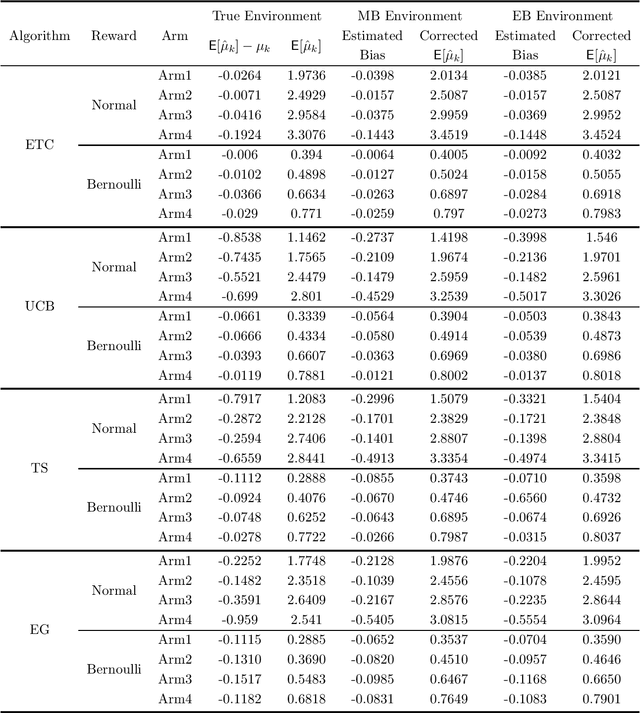
It has been recently shown in the literature that the sample averages from online learning experiments are biased when used to estimate the mean reward. To correct the bias, off-policy evaluation methods, including importance sampling and doubly robust estimators, typically calculate the propensity score, which is unavailable in this setting due to unknown reward distribution and the adaptive policy. This paper provides a procedure to debias the samples using bootstrap, which doesn't require the knowledge of the reward distribution at all. Numerical experiments demonstrate the effective bias reduction for samples generated by popular multi-armed bandit algorithms such as Explore-Then-Commit (ETC), UCB, Thompson sampling and $\epsilon$-greedy. We also analyze and provide theoretical justifications for the procedure under the ETC algorithm, including the asymptotic convergence of the bias decay rate in the real and bootstrap worlds.
Sublinear Regret for Learning POMDPs
Jul 14, 2021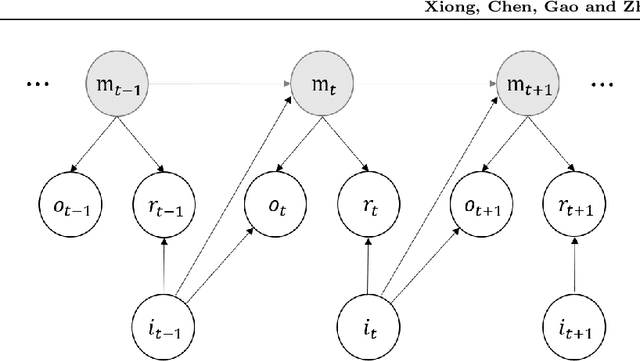
We study the model-based undiscounted reinforcement learning for partially observable Markov decision processes (POMDPs). The oracle we consider is the optimal policy of the POMDP with a known environment in terms of the average reward over an infinite horizon. We propose a learning algorithm for this problem, building on spectral method-of-moments estimations for hidden Markov models, the belief error control in POMDPs and upper-confidence-bound methods for online learning. We establish a regret bound of $O(T^{2/3}\sqrt{\log T})$ for the proposed learning algorithm where $T$ is the learning horizon. This is, to the best of our knowledge, the first algorithm achieving sublinear regret with respect to our oracle for learning general POMDPs.
Searching Collaborative Agents for Multi-plane Localization in 3D Ultrasound
May 22, 2021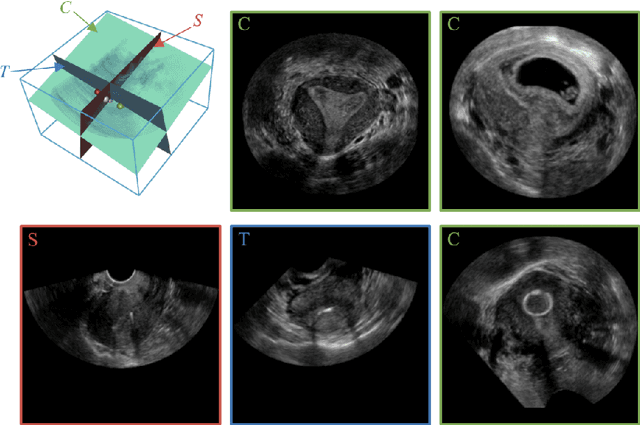
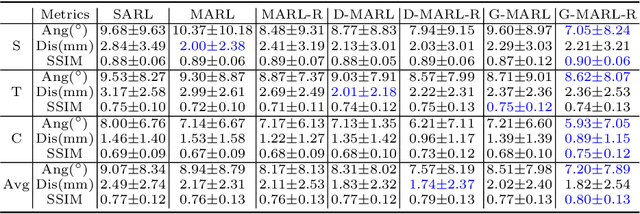
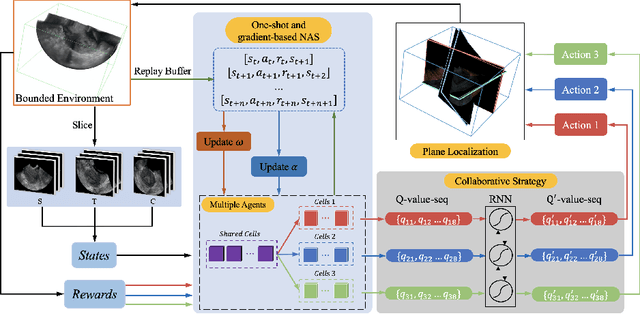

3D ultrasound (US) has become prevalent due to its rich spatial and diagnostic information not contained in 2D US. Moreover, 3D US can contain multiple standard planes (SPs) in one shot. Thus, automatically localizing SPs in 3D US has the potential to improve user-independence and scanning-efficiency. However, manual SP localization in 3D US is challenging because of the low image quality, huge search space and large anatomical variability. In this work, we propose a novel multi-agent reinforcement learning (MARL) framework to simultaneously localize multiple SPs in 3D US. Our contribution is four-fold. First, our proposed method is general and it can accurately localize multiple SPs in different challenging US datasets. Second, we equip the MARL system with a recurrent neural network (RNN) based collaborative module, which can strengthen the communication among agents and learn the spatial relationship among planes effectively. Third, we explore to adopt the neural architecture search (NAS) to automatically design the network architecture of both the agents and the collaborative module. Last, we believe we are the first to realize automatic SP localization in pelvic US volumes, and note that our approach can handle both normal and abnormal uterus cases. Extensively validated on two challenging datasets of the uterus and fetal brain, our proposed method achieves the average localization accuracy of 7.03 degrees/1.59mm and 9.75 degrees/1.19mm. Experimental results show that our light-weight MARL model has higher accuracy than state-of-the-art methods.
Agent with Warm Start and Adaptive Dynamic Termination for Plane Localization in 3D Ultrasound
Mar 26, 2021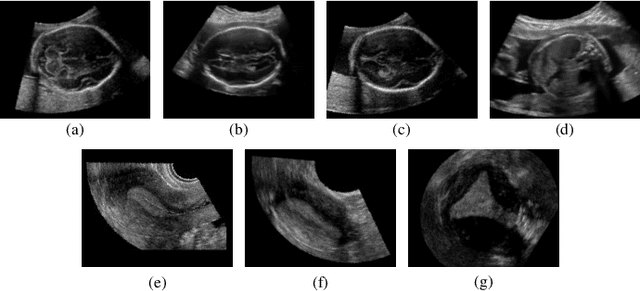
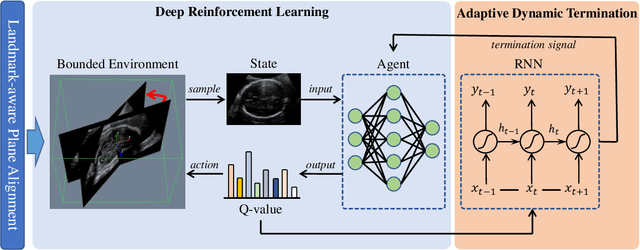
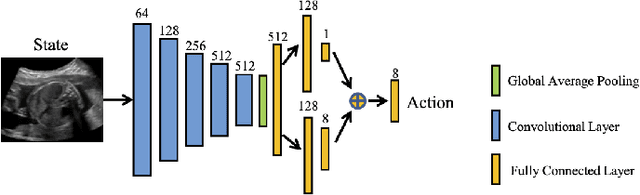
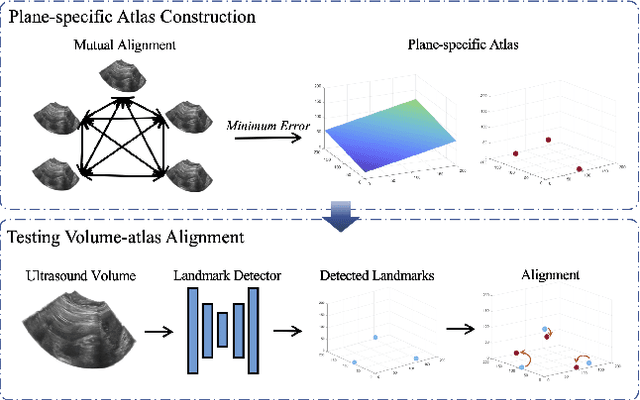
Accurate standard plane (SP) localization is the fundamental step for prenatal ultrasound (US) diagnosis. Typically, dozens of US SPs are collected to determine the clinical diagnosis. 2D US has to perform scanning for each SP, which is time-consuming and operator-dependent. While 3D US containing multiple SPs in one shot has the inherent advantages of less user-dependency and more efficiency. Automatically locating SP in 3D US is very challenging due to the huge search space and large fetal posture variations. Our previous study proposed a deep reinforcement learning (RL) framework with an alignment module and active termination to localize SPs in 3D US automatically. However, termination of agent search in RL is important and affects the practical deployment. In this study, we enhance our previous RL framework with a newly designed adaptive dynamic termination to enable an early stop for the agent searching, saving at most 67% inference time, thus boosting the accuracy and efficiency of the RL framework at the same time. Besides, we validate the effectiveness and generalizability of our algorithm extensively on our in-house multi-organ datasets containing 433 fetal brain volumes, 519 fetal abdomen volumes, and 683 uterus volumes. Our approach achieves localization error of 2.52mm/10.26 degrees, 2.48mm/10.39 degrees, 2.02mm/10.48 degrees, 2.00mm/14.57 degrees, 2.61mm/9.71 degrees, 3.09mm/9.58 degrees, 1.49mm/7.54 degrees for the transcerebellar, transventricular, transthalamic planes in fetal brain, abdominal plane in fetal abdomen, and mid-sagittal, transverse and coronal planes in uterus, respectively. Experimental results show that our method is general and has the potential to improve the efficiency and standardization of US scanning.
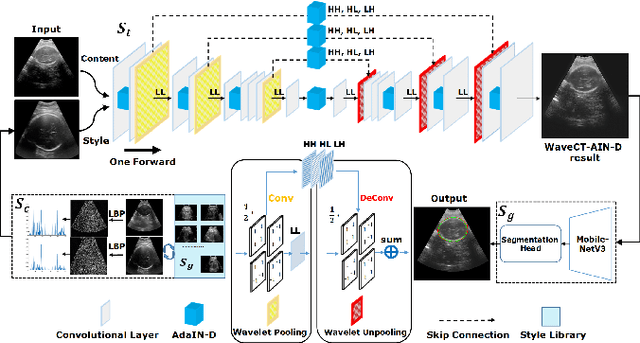
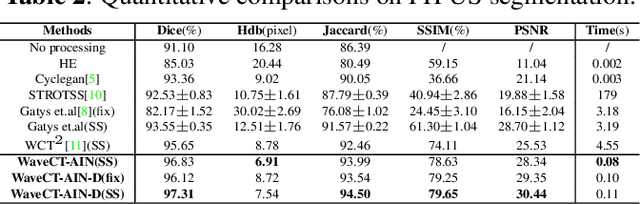
Generalize Ultrasound Image Segmentation via Instant and Plug & Play Style Transfer
Jan 11, 2021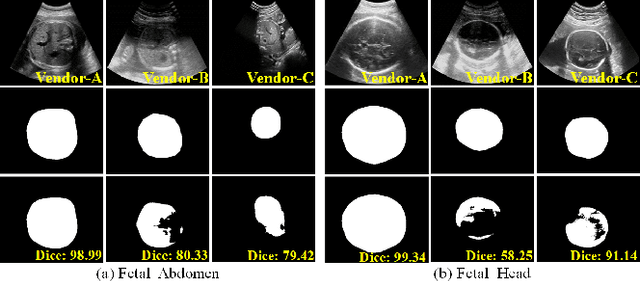
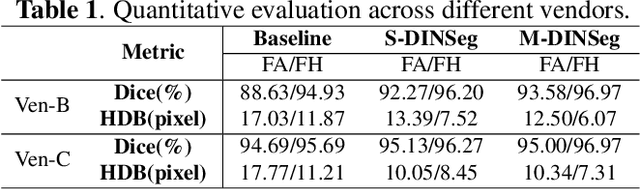
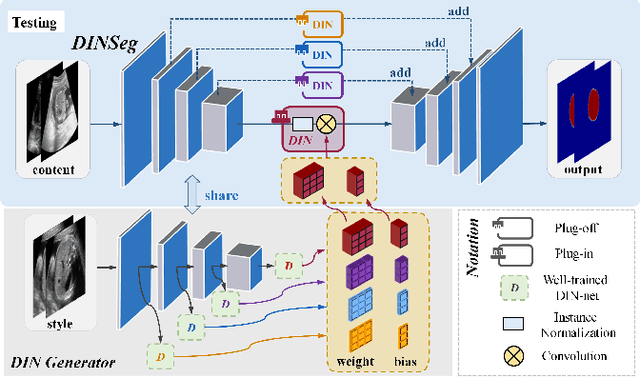
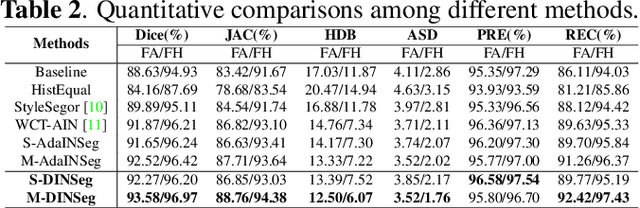
Deep segmentation models that generalize to images with unknown appearance are important for real-world medical image analysis. Retraining models leads to high latency and complex pipelines, which are impractical in clinical settings. The situation becomes more severe for ultrasound image analysis because of their large appearance shifts. In this paper, we propose a novel method for robust segmentation under unknown appearance shifts. Our contribution is three-fold. First, we advance a one-stage plug-and-play solution by embedding hierarchical style transfer units into a segmentation architecture. Our solution can remove appearance shifts and perform segmentation simultaneously. Second, we adopt Dynamic Instance Normalization to conduct precise and dynamic style transfer in a learnable manner, rather than previously fixed style normalization. Third, our solution is fast and lightweight for routine clinical adoption. Given 400*400 image input, our solution only needs an additional 0.2ms and 1.92M FLOPs to handle appearance shifts compared to the baseline pipeline. Extensive experiments are conducted on a large dataset from three vendors demonstrate our proposed method enhances the robustness of deep segmentation models.
Region Proposal Network with Graph Prior and IoU-Balance Loss for Landmark Detection in 3D Ultrasound
Apr 01, 2020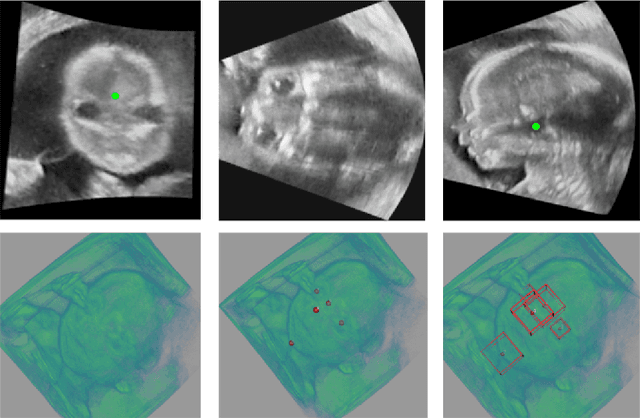
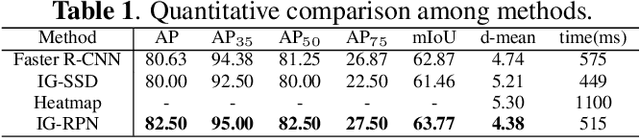
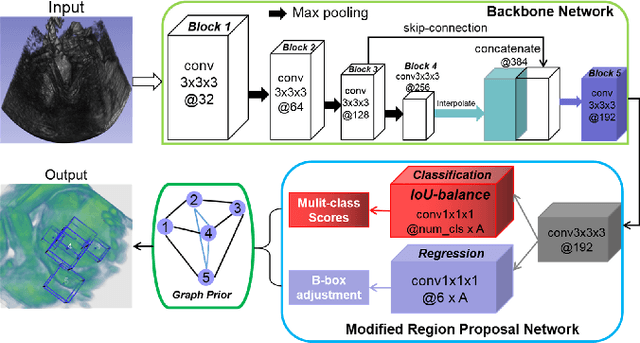
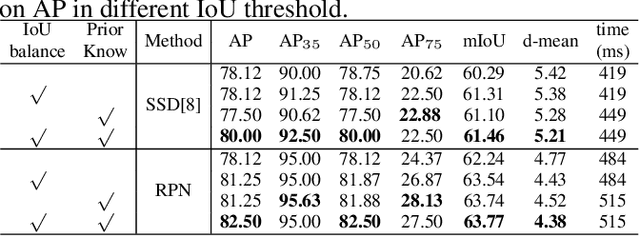
3D ultrasound (US) can facilitate detailed prenatal examinations for fetal growth monitoring. To analyze a 3D US volume, it is fundamental to identify anatomical landmarks of the evaluated organs accurately. Typical deep learning methods usually regress the coordinates directly or involve heatmap-matching. However, these methods struggle to deal with volumes with large sizes and the highly-varying positions and orientations of fetuses. In this work, we exploit an object detection framework to detect landmarks in 3D fetal facial US volumes. By regressing multiple parameters of the landmark-centered bounding box (B-box) with a strict criteria, the proposed model is able to pinpoint the exact location of the targeted landmarks. Specifically, the model uses a 3D region proposal network (RPN) to generate 3D candidate regions, followed by several 3D classification branches to select the best candidate. It also adopts an IoU-balance loss to improve communications between branches that benefits the learning process. Furthermore, it leverages a distance-based graph prior to regularize the training and helps to reduce false positive predictions. The performance of the proposed framework is evaluated on a 3D US dataset to detect five key fetal facial landmarks. Results showed the proposed method outperforms some of the state-of-the-art methods in efficacy and efficiency.
Remove Appearance Shift for Ultrasound Image Segmentation via Fast and Universal Style Transfer
Feb 14, 2020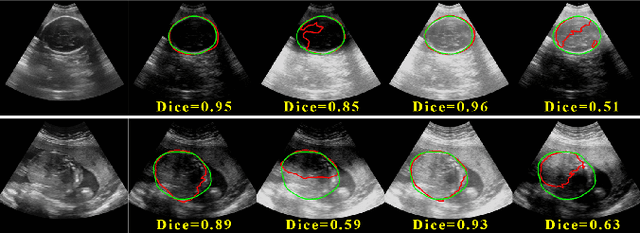
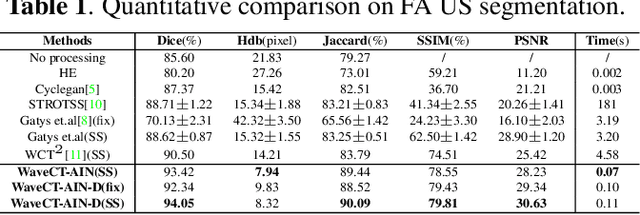
Deep Neural Networks (DNNs) suffer from the performance degradation when image appearance shift occurs, especially in ultrasound (US) image segmentation. In this paper, we propose a novel and intuitive framework to remove the appearance shift, and hence improve the generalization ability of DNNs. Our work has three highlights. First, we follow the spirit of universal style transfer to remove appearance shifts, which was not explored before for US images. Without sacrificing image structure details, it enables the arbitrary style-content transfer. Second, accelerated with Adaptive Instance Normalization block, our framework achieved real-time speed required in the clinical US scanning. Third, an efficient and effective style image selection strategy is proposed to ensure the target-style US image and testing content US image properly match each other. Experiments on two large US datasets demonstrate that our methods are superior to state-of-the-art methods on making DNNs robust against various appearance shifts.