 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeAdvancing Sequential Numerical Prediction in Autoregressive Models
May 19, 2025Autoregressive models have become the de facto choice for sequence generation tasks, but standard approaches treat digits as independent tokens and apply cross-entropy loss, overlooking the coherent structure of numerical sequences. This paper introduces Numerical Token Integrity Loss (NTIL) to address this gap. NTIL operates at two levels: (1) token-level, where it extends the Earth Mover's Distance (EMD) to preserve ordinal relationships between numerical values, and (2) sequence-level, where it penalizes the overall discrepancy between the predicted and actual sequences. This dual approach improves numerical prediction and integrates effectively with LLMs/MLLMs. Extensive experiments show significant performance improvements with NTIL.
Vision as LoRA
Mar 26, 2025We introduce Vision as LoRA (VoRA), a novel paradigm for transforming an LLM into an MLLM. Unlike prevalent MLLM architectures that rely on external vision modules for vision encoding, VoRA internalizes visual capabilities by integrating vision-specific LoRA layers directly into the LLM. This design allows the added parameters to be seamlessly merged into the LLM during inference, eliminating structural complexity and minimizing computational overhead. Moreover, inheriting the LLM's ability of handling flexible context, VoRA can process inputs at arbitrary resolutions. To further strengthen VoRA's visual capabilities, we introduce a block-wise distillation method that transfers visual priors from a pre-trained ViT into the LoRA layers, effectively accelerating training by injecting visual knowledge. Additionally, we apply bi-directional attention masks to better capture the context information of an image. We successfully demonstrate that with additional pre-training data, VoRA can perform comparably with conventional encode-based MLLMs. All training data, codes, and model weights will be released at https://github.com/Hon-Wong/VoRA.
EVE: Towards End-to-End Video Subtitle Extraction with Vision-Language Models
Mar 06, 2025The advent of Large Vision-Language Models (LVLMs) has advanced the video-based tasks, such as video captioning and video understanding. Some previous research indicates that taking texts in videos as input can further improve the performance of video understanding. As a type of indispensable information in short videos or movies, subtitles can assist LVLMs to better understand videos. Most existing methods for video subtitle extraction are based on a multi-stage framework, handling each frame independently. They can hardly exploit the temporal information of videos. Although some LVLMs exhibit the robust OCR capability, predicting accurate timestamps for subtitle texts is still challenging. In this paper, we propose an End-to-end Video Subtitle Extraction method, called EVE, which consists of three modules: a vision encoder, an adapter module, and a large language model. To effectively compress the visual tokens from the vision encoder, we propose a novel adapter InterleavedVT to interleave two modalities. It contains a visual compressor and a textual region compressor. The proposed InterleavedVT exploits both the merits of average pooling and Q-Former in token compression. Taking the temporal information of videos into account, we introduce a sliding-window mechanism in the textual region compressor. To benchmark the video subtitle extraction task, we propose a large dataset ViSa including 2.5M videos. Extensive experiments on ViSa demonstrate that the proposed EVE can outperform existing open-sourced tools and LVLMs.
Dynamic-VLM: Simple Dynamic Visual Token Compression for VideoLLM
Dec 12, 2024



The application of Large Vision-Language Models (LVLMs) for analyzing images and videos is an exciting and rapidly evolving field. In recent years, we've seen significant growth in high-quality image-text datasets for fine-tuning image understanding, but there is still a lack of comparable datasets for videos. Additionally, many VideoLLMs are extensions of single-image VLMs, which may not efficiently handle the complexities of longer videos. In this study, we introduce a large-scale synthetic dataset created from proprietary models, using carefully designed prompts to tackle a wide range of questions. We also explore a dynamic visual token compression architecture that strikes a balance between computational efficiency and performance. Our proposed \model{} achieves state-of-the-art results across various video tasks and shows impressive generalization, setting new baselines in multi-image understanding. Notably, \model{} delivers an absolute improvement of 2.7\% over LLaVA-OneVision on VideoMME and 10.7\% on MuirBench. Codes are available at https://github.com/Hon-Wong/ByteVideoLLM
Perceptual-Distortion Balanced Image Super-Resolution is a Multi-Objective Optimization Problem
Sep 05, 2024Training Single-Image Super-Resolution (SISR) models using pixel-based regression losses can achieve high distortion metrics scores (e.g., PSNR and SSIM), but often results in blurry images due to insufficient recovery of high-frequency details. Conversely, using GAN or perceptual losses can produce sharp images with high perceptual metric scores (e.g., LPIPS), but may introduce artifacts and incorrect textures. Balancing these two types of losses can help achieve a trade-off between distortion and perception, but the challenge lies in tuning the loss function weights. To address this issue, we propose a novel method that incorporates Multi-Objective Optimization (MOO) into the training process of SISR models to balance perceptual quality and distortion. We conceptualize the relationship between loss weights and image quality assessment (IQA) metrics as black-box objective functions to be optimized within our Multi-Objective Bayesian Optimization Super-Resolution (MOBOSR) framework. This approach automates the hyperparameter tuning process, reduces overall computational cost, and enables the use of numerous loss functions simultaneously. Extensive experiments demonstrate that MOBOSR outperforms state-of-the-art methods in terms of both perceptual quality and distortion, significantly advancing the perception-distortion Pareto frontier. Our work points towards a new direction for future research on balancing perceptual quality and fidelity in nearly all image restoration tasks. The source code and pretrained models are available at: https://github.com/ZhuKeven/MOBOSR.
A Bounding Box is Worth One Token: Interleaving Layout and Text in a Large Language Model for Document Understanding
Jul 02, 2024



Recently, many studies have demonstrated that exclusively incorporating OCR-derived text and spatial layouts with large language models (LLMs) can be highly effective for document understanding tasks. However, existing methods that integrate spatial layouts with text have limitations, such as producing overly long text sequences or failing to fully leverage the autoregressive traits of LLMs. In this work, we introduce Interleaving Layout and Text in a Large Language Model (LayTextLLM)} for document understanding. In particular, LayTextLLM projects each bounding box to a single embedding and interleaves it with text, efficiently avoiding long sequence issues while leveraging autoregressive traits of LLMs. LayTextLLM not only streamlines the interaction of layout and textual data but also shows enhanced performance in Key Information Extraction (KIE) and Visual Question Answering (VQA). Comprehensive benchmark evaluations reveal significant improvements, with a 27.0% increase on KIE tasks and 24.1% on VQA tasks compared to previous state-of-the-art document understanding MLLMs, as well as a 15.5% improvement over other SOTA OCR-based LLMs on KIE tasks.
MTVQA: Benchmarking Multilingual Text-Centric Visual Question Answering
May 20, 2024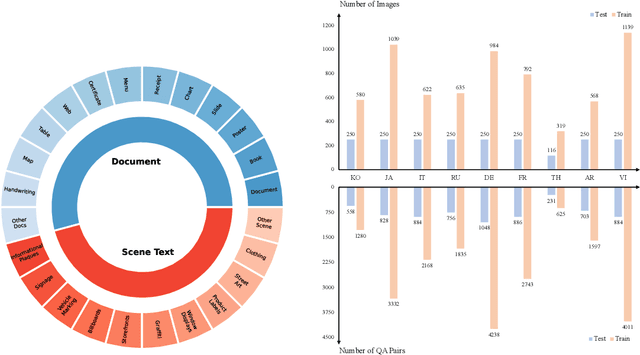
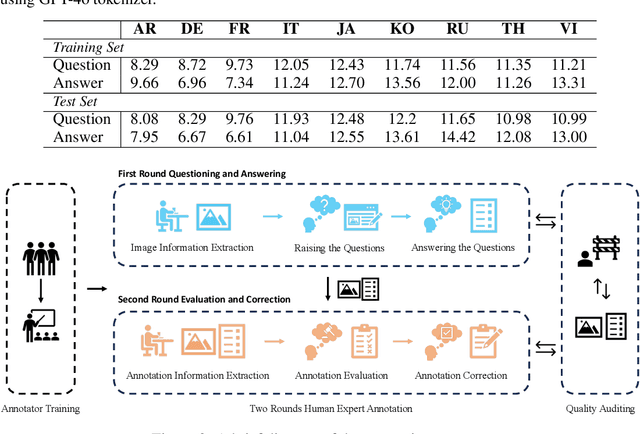
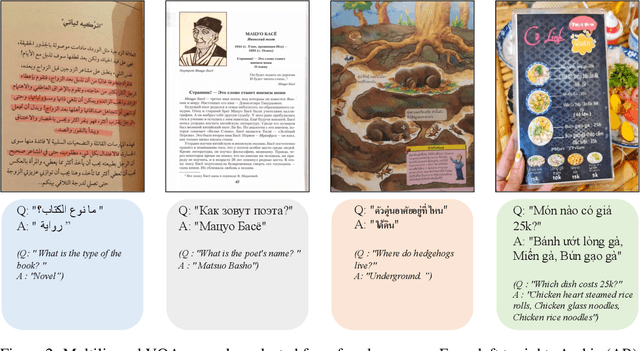
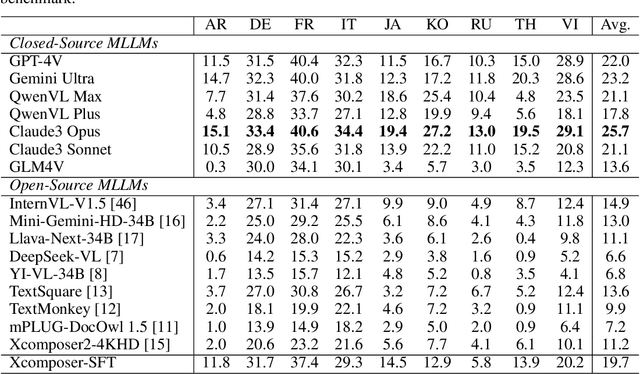
Text-Centric Visual Question Answering (TEC-VQA) in its proper format not only facilitates human-machine interaction in text-centric visual environments but also serves as a de facto gold proxy to evaluate AI models in the domain of text-centric scene understanding. However, most TEC-VQA benchmarks have focused on high-resource languages like English and Chinese. Despite pioneering works to expand multilingual QA pairs in non-text-centric VQA datasets using translation engines, the translation-based protocol encounters a substantial ``Visual-textual misalignment'' problem when applied to TEC-VQA. Specifically, it prioritizes the text in question-answer pairs while disregarding the visual text present in images. Furthermore, it does not adequately tackle challenges related to nuanced meaning, contextual distortion, language bias, and question-type diversity. In this work, we address the task of multilingual TEC-VQA and provide a benchmark with high-quality human expert annotations in 9 diverse languages, called MTVQA. To our knowledge, MTVQA is the first multilingual TEC-VQA benchmark to provide human expert annotations for text-centric scenarios. Further, by evaluating several state-of-the-art Multimodal Large Language Models (MLLMs), including GPT-4V, on our MTVQA dataset, it is evident that there is still room for performance improvement, underscoring the value of our dataset. We hope this dataset will provide researchers with fresh perspectives and inspiration within the community. The MTVQA dataset will be available at https://huggingface.co/datasets/ByteDance/MTVQA.
Elysium: Exploring Object-level Perception in Videos via MLLM
Mar 29, 2024Multi-modal Large Language Models (MLLMs) have demonstrated their ability to perceive objects in still images, but their application in video-related tasks, such as object tracking, remains understudied. This lack of exploration is primarily due to two key challenges. Firstly, extensive pretraining on large-scale video datasets is required to equip MLLMs with the capability to perceive objects across multiple frames and understand inter-frame relationships. Secondly, processing a large number of frames within the context window of Large Language Models (LLMs) can impose a significant computational burden. To address the first challenge, we introduce ElysiumTrack-1M, a large-scale video dataset supported for three tasks: Single Object Tracking (SOT), Referring Single Object Tracking (RSOT), and Video Referring Expression Generation (Video-REG). ElysiumTrack-1M contains 1.27 million annotated video frames with corresponding object boxes and descriptions. Leveraging this dataset, we conduct training of MLLMs and propose a token-compression model T-Selector to tackle the second challenge. Our proposed approach, Elysium: Exploring Object-level Perception in Videos via MLLM, is an end-to-end trainable MLLM that attempts to conduct object-level tasks in videos without requiring any additional plug-in or expert models. All codes and datasets are available at https://github.com/Hon-Wong/Elysium.
PaDeLLM-NER: Parallel Decoding in Large Language Models for Named Entity Recognition
Feb 15, 2024



In this study, we aim to reduce generation latency for Named Entity Recognition (NER) with Large Language Models (LLMs). The main cause of high latency in LLMs is the sequential decoding process, which autoregressively generates all labels and mentions for NER, significantly increase the sequence length. To this end, we introduce Parallel Decoding in LLM for NE} (PaDeLLM-NER), a approach that integrates seamlessly into existing generative model frameworks without necessitating additional modules or architectural modifications. PaDeLLM-NER allows for the simultaneous decoding of all mentions, thereby reducing generation latency. Experiments reveal that PaDeLLM-NER significantly increases inference speed that is 1.76 to 10.22 times faster than the autoregressive approach for both English and Chinese. Simultaneously it maintains the quality of predictions as evidenced by the performance that is on par with the state-of-the-art across various datasets.
GloTSFormer: Global Video Text Spotting Transformer
Jan 08, 2024Video Text Spotting (VTS) is a fundamental visual task that aims to predict the trajectories and content of texts in a video. Previous works usually conduct local associations and apply IoU-based distance and complex post-processing procedures to boost performance, ignoring the abundant temporal information and the morphological characteristics in VTS. In this paper, we propose a novel Global Video Text Spotting Transformer GloTSFormer to model the tracking problem as global associations and utilize the Gaussian Wasserstein distance to guide the morphological correlation between frames. Our main contributions can be summarized as three folds. 1). We propose a Transformer-based global tracking method GloTSFormer for VTS and associate multiple frames simultaneously. 2). We introduce a Wasserstein distance-based method to conduct positional associations between frames. 3). We conduct extensive experiments on public datasets. On the ICDAR2015 video dataset, GloTSFormer achieves 56.0 MOTA with 4.6 absolute improvement compared with the previous SOTA method and outperforms the previous Transformer-based method by a significant 8.3 MOTA.