 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSkelHCC: A Hyperbolic CLIP-Driven Cache Adaptation Framework for Skeleton-based One-Shot Action Recognition
Jun 02, 2026Skeleton-based action recognition aims to understand human behaviors from body joint sequences and is especially challenging in the one-shot setting, where only a single labeled exemplar is available for each novel action. A key challenge is learning representations that capture the hierarchical and compositional structure of human motion while aligning effectively with high-level action semantics under extreme data scarcity. Existing approaches, largely based on Euclidean embeddings and low-level motion cues, struggle to model the tree-like organization of skeleton data, limiting cross-modal alignment and generalization to unseen action categories. We propose SkelHCC, a unified skeleton hyperbolic CLIP-driven cache adaptation framework for one-shot skeleton-based action recognition. SkelHCC introduces an Explicitly Hierarchical Hyperbolic CLIP (EH-HCLIP) module that embeds skeleton sequences and action language into a shared hyperbolic space. By leveraging the negative curvature and exponential volume growth of hyperbolic geometry, EH-HCLIP naturally encodes the joint-part-body hierarchy of human anatomy and yields structurally consistent cross-modal representations. To support efficient one-shot adaptation, SkelHCC further integrates a training-free LLM-guided Multi-granularity Voting Cache (LMV-Cache) for context-aware inference. Experiments on NTU RGB+D 60, NTU RGB+D 120, and PKU-MMD demonstrate that SkelHCC consistently outperforms state-of-the-art methods.
Echo4DIR: 4D Implicit Heart Reconstruction from 2D Echocardiography Videos
May 21, 2026Reconstructing 4D (3D+t) cardiac geometry from sparse 2D echocardiography is highly desirable yet fundamentally challenged by geometric ambiguity and temporal discontinuity. To tackle these issues, we propose Echo4DIR, a novel test-time 4D implicit reconstruction framework. Specifically, we learn robust 3D shape priors from statistical shape models (SSMs) via a cardiac conditional SDF, constructing an Epipolar Mask Encoder module with epipolar cross attention to effectively fuse multi-view features. To bridge the synthetic-to-real domain gap, we introduce a self-supervised SDF-tailored differentiable rendering strategy for patient-specific 3D shape adaptation using uncalibrated clinical masks without requiring 3D ground truth. Crucially, the inherent continuity of implicit representation overcomes sparse observations, enabling anatomically reliable geometry at arbitrary resolutions. Furthermore, to empower our framework with physically continuous 4D extension, we introduce a Radial SDF Alignment strategy that strictly locks shape evolution to the predicted velocity field, fundamentally eliminating mesh drift. Extensive experiments on synthetic benchmarks and real clinical datasets demonstrate that Echo4DIR achieves state-of-the-art 4D cardiac mesh reconstruction, notably yielding an impressive clinical overlap of up to 98.35% Dice and 96.75% IoU.
RePCM: Region-Specific and Phenotype-Adaptive Bi-Ventricular Cardiac Motion Synthesis
May 20, 2026Cardiac motion over a cardiac cycle is crucial for quantifying regional function and is strongly affected by cardiovascular diseases. Since temporally dense mesh sequences are difficult to obtain in practice, we focus on leveraging the more accessible end-diastolic frame to infer a full-cycle sequence. Due to strong regional and disease-specific differences, traditional methods often oversmooth the data by relying on generative models that are optimized for global patterns. To address this problem, we propose Region-Aware and Phenotype-Adaptive Bi-Ventricular Cardiac Motion Synthesis (RePCM) for single frame Bi-ventricular mesh motion completion. In Stage I, a reconstruction network learns vertex wise motion descriptors and clustering yields a data driven functional partition, providing an explicit motion derived region structure. In Stage II, a Region-Specific Injection Module enforces masked, synchronized region exchange within a conditional VAE, preserving localized specific dynamics and restricting cross-region mixing. A Phenotype-Adaptive Mixture-of-Experts prior conditioned on ED shape uses anatomy-guided cues to model latent motion trends and capture inter-disease variability. Experiments on three datasets covering different cardiovascular diseases show consistent gains in geometric and functional metrics and improved preservation of region specific dynamics.
TSkel-Mamba: Temporal Dynamic Modeling via State Space Model for Human Skeleton-based Action Recognition
Dec 12, 2025Skeleton-based action recognition has garnered significant attention in the computer vision community. Inspired by the recent success of the selective state-space model (SSM) Mamba in modeling 1D temporal sequences, we propose TSkel-Mamba, a hybrid Transformer-Mamba framework that effectively captures both spatial and temporal dynamics. In particular, our approach leverages Spatial Transformer for spatial feature learning while utilizing Mamba for temporal modeling. Mamba, however, employs separate SSM blocks for individual channels, which inherently limits its ability to model inter-channel dependencies. To better adapt Mamba for skeleton data and enhance Mamba`s ability to model temporal dependencies, we introduce a Temporal Dynamic Modeling (TDM) block, which is a versatile plug-and-play component that integrates a novel Multi-scale Temporal Interaction (MTI) module. The MTI module employs multi-scale Cycle operators to capture cross-channel temporal interactions, a critical factor in action recognition. Extensive experiments on NTU-RGB+D 60, NTU-RGB+D 120, NW-UCLA and UAV-Human datasets demonstrate that TSkel-Mamba achieves state-of-the-art performance while maintaining low inference time, making it both efficient and highly effective.
AutoICE: Automatically Synthesizing Verifiable C Code via LLM-driven Evolution
Dec 08, 2025



Automatically synthesizing verifiable code from natural language requirements ensures software correctness and reliability while significantly lowering the barrier to adopting the techniques of formal methods. With the rise of large language models (LLMs), long-standing efforts at autoformalization have gained new momentum. However, existing approaches suffer from severe syntactic and semantic errors due to the scarcity of domain-specific pre-training corpora and often fail to formalize implicit knowledge effectively. In this paper, we propose AutoICE, an LLM-driven evolutionary search for synthesizing verifiable C code. It introduces the diverse individual initialization and the collaborative crossover to enable diverse iterative updates, thereby mitigating error propagation inherent in single-agent iterations. Besides, it employs the self-reflective mutation to facilitate the discovery of implicit knowledge. Evaluation results demonstrate the effectiveness of AutoICE: it successfully verifies $90.36$\% of code, outperforming the state-of-the-art (SOTA) approach. Besides, on a developer-friendly dataset variant, AutoICE achieves a $88.33$\% verification success rate, significantly surpassing the $65$\% success rate of the SOTA approach.
Simultaneous Polysomnography and Cardiotocography Reveal Temporal Correlation Between Maternal Obstructive Sleep Apnea and Fetal Hypoxia
Apr 17, 2025Background: Obstructive sleep apnea syndrome (OSAS) during pregnancy is common and can negatively affect fetal outcomes. However, studies on the immediate effects of maternal hypoxia on fetal heart rate (FHR) changes are lacking. Methods: We used time-synchronized polysomnography (PSG) and cardiotocography (CTG) data from two cohorts to analyze the correlation between maternal hypoxia and FHR changes (accelerations or decelerations). Maternal hypoxic event characteristics were analyzed using generalized linear modeling (GLM) to assess their associations with different FHR changes. Results: A total of 118 pregnant women participated. FHR changes were significantly associated with maternal hypoxia, primarily characterized by accelerations. A longer hypoxic duration correlated with more significant FHR accelerations (P < 0.05), while prolonged hypoxia and greater SpO2 drop were linked to FHR decelerations (P < 0.05). Both cohorts showed a transient increase in FHR during maternal hypoxia, which returned to baseline after the event resolved. Conclusion: Maternal hypoxia significantly affects FHR, suggesting that maternal OSAS may contribute to fetal hypoxia. These findings highlight the importance of maternal-fetal interactions and provide insights for future interventions.
Egocentric Hand-object Interaction Detection
Nov 16, 2022In this paper, we propose a method to jointly determine the status of hand-object interaction. This is crucial for egocentric human activity understanding and interaction. From a computer vision perspective, we believe that determining whether a hand is interacting with an object depends on whether there is an interactive hand pose and whether the hand is touching the object. Thus, we extract the hand pose, hand-object masks to jointly determine the interaction status. In order to solve the problem of hand pose estimation due to in-hand object occlusion, we use a multi-cam system to capture hand pose data from multiple perspectives. We evaluate and compare our method with the most recent work from Shan et al. \cite{Shan20} on selected images from EPIC-KITCHENS \cite{damen2018scaling} dataset and achieve $89\%$ accuracy on HOI (hand-object interaction) detection which is comparative to Shan's ($92\%$). However, for real-time performance, our method can run over $\textbf{30}$ FPS which is much more efficient than Shan's ($\textbf{1}\sim\textbf{2}$ FPS). A demo can be found from https://www.youtube.com/watch?v=XVj3zBuynmQ
On-Sensor Binarized Fully Convolutional Neural Network with A Pixel Processor Array
Feb 02, 2022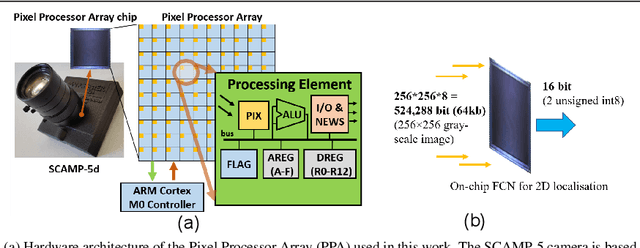
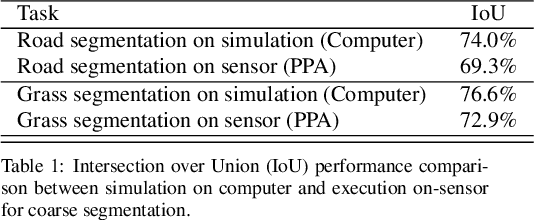
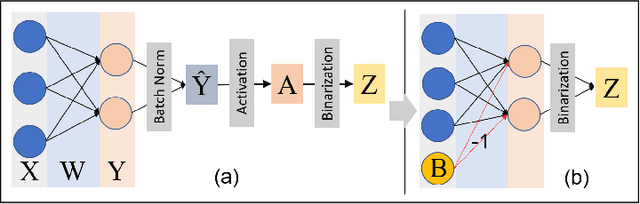
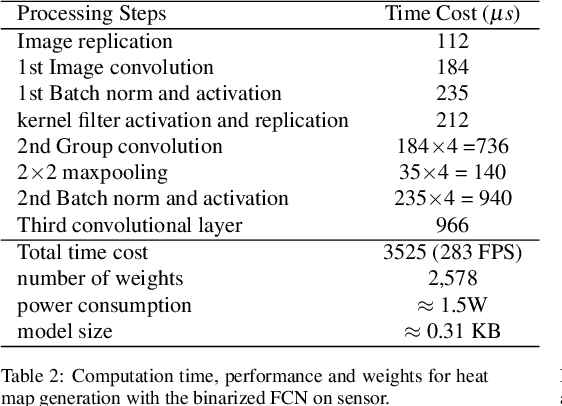
This work presents a method to implement fully convolutional neural networks (FCNs) on Pixel Processor Array (PPA) sensors, and demonstrates coarse segmentation and object localisation tasks. We design and train binarized FCN for both binary weights and activations using batchnorm, group convolution, and learnable threshold for binarization, producing networks small enough to be embedded on the focal plane of the PPA, with limited local memory resources, and using parallel elementary add/subtract, shifting, and bit operations only. We demonstrate the first implementation of an FCN on a PPA device, performing three convolution layers entirely in the pixel-level processors. We use this architecture to demonstrate inference generating heat maps for object segmentation and localisation at over 280 FPS using the SCAMP-5 PPA vision chip.
Multi-Scale Feature Fusion: Learning Better Semantic Segmentation for Road Pothole Detection
Dec 24, 2021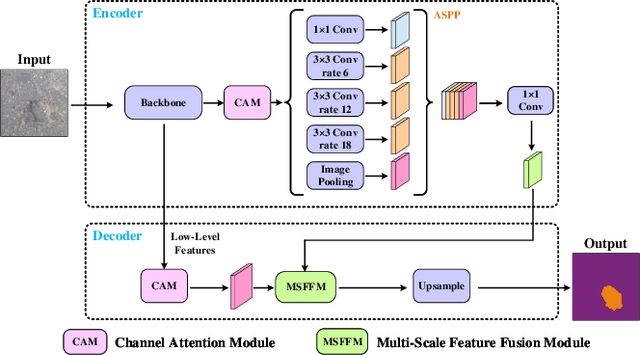
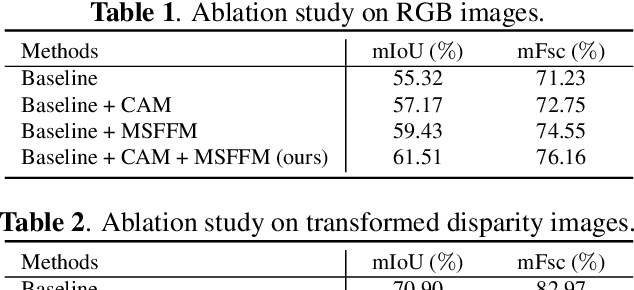
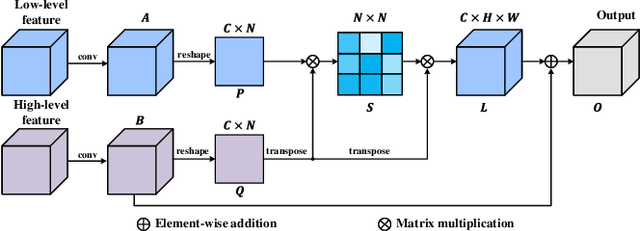
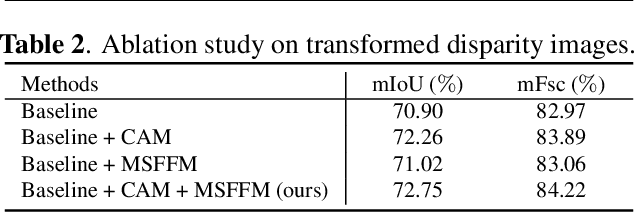
This paper presents a novel pothole detection approach based on single-modal semantic segmentation. It first extracts visual features from input images using a convolutional neural network. A channel attention module then reweighs the channel features to enhance the consistency of different feature maps. Subsequently, we employ an atrous spatial pyramid pooling module (comprising of atrous convolutions in series, with progressive rates of dilation) to integrate the spatial context information. This helps better distinguish between potholes and undamaged road areas. Finally, the feature maps in the adjacent layers are fused using our proposed multi-scale feature fusion module. This further reduces the semantic gap between different feature channel layers. Extensive experiments were carried out on the Pothole-600 dataset to demonstrate the effectiveness of our proposed method. The quantitative comparisons suggest that our method achieves the state-of-the-art (SoTA) performance on both RGB images and transformed disparity images, outperforming three SoTA single-modal semantic segmentation networks.
Fully-simulated Integration of Scamp5d Vision System and Robot Simulator
Oct 12, 2021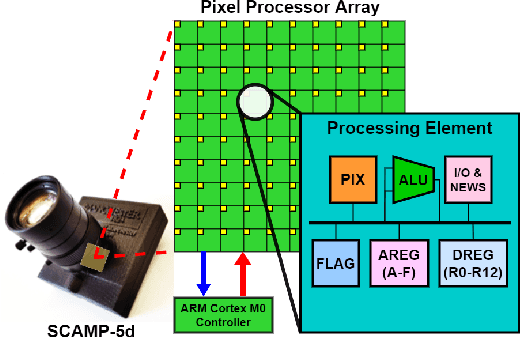

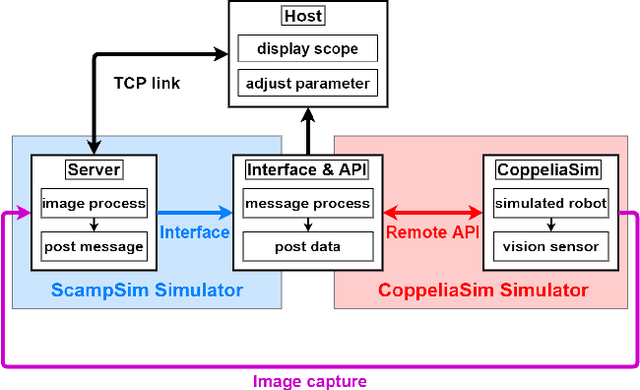
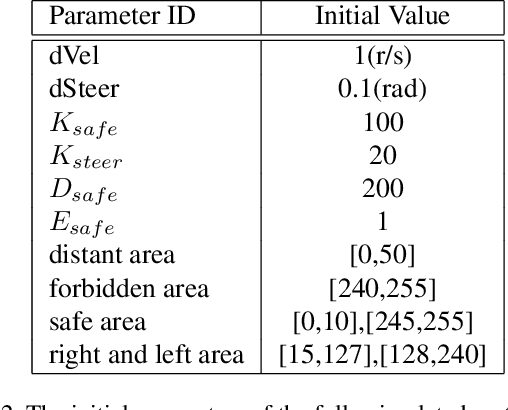
This paper proposed a fully-simulated environment by integrating an on-sensor visual computing device, SCAMP, and CoppeliaSim robot simulator via interface and remote API. Within this platform, a mobile robot obstacle avoidance and target navigation with pre-set barriers is exploited with on-sensor visual computing, where images are captured in a robot simulator and processed by an on-sensor processing server after being transferred. We made our developed platform and associated algorithms for mobile robot navigation available online.