 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReaching the Limit in Autonomous Racing: Optimal Control versus Reinforcement Learning
Oct 18, 2023A central question in robotics is how to design a control system for an agile mobile robot. This paper studies this question systematically, focusing on a challenging setting: autonomous drone racing. We show that a neural network controller trained with reinforcement learning (RL) outperformed optimal control (OC) methods in this setting. We then investigated which fundamental factors have contributed to the success of RL or have limited OC. Our study indicates that the fundamental advantage of RL over OC is not that it optimizes its objective better but that it optimizes a better objective. OC decomposes the problem into planning and control with an explicit intermediate representation, such as a trajectory, that serves as an interface. This decomposition limits the range of behaviors that can be expressed by the controller, leading to inferior control performance when facing unmodeled effects. In contrast, RL can directly optimize a task-level objective and can leverage domain randomization to cope with model uncertainty, allowing the discovery of more robust control responses. Our findings allowed us to push an agile drone to its maximum performance, achieving a peak acceleration greater than 12 times the gravitational acceleration and a peak velocity of 108 kilometers per hour. Our policy achieved superhuman control within minutes of training on a standard workstation. This work presents a milestone in agile robotics and sheds light on the role of RL and OC in robot control.
Domain Generalization without Excess Empirical Risk
Aug 30, 2023Given data from diverse sets of distinct distributions, domain generalization aims to learn models that generalize to unseen distributions. A common approach is designing a data-driven surrogate penalty to capture generalization and minimize the empirical risk jointly with the penalty. We argue that a significant failure mode of this recipe is an excess risk due to an erroneous penalty or hardness in joint optimization. We present an approach that eliminates this problem. Instead of jointly minimizing empirical risk with the penalty, we minimize the penalty under the constraint of optimality of the empirical risk. This change guarantees that the domain generalization penalty cannot impair optimization of the empirical risk, i.e., in-distribution performance. To solve the proposed optimization problem, we demonstrate an exciting connection to rate-distortion theory and utilize its tools to design an efficient method. Our approach can be applied to any penalty-based domain generalization method, and we demonstrate its effectiveness by applying it to three examplar methods from the literature, showing significant improvements.
Online Continual Learning Without the Storage Constraint
May 16, 2023



Online continual learning (OCL) research has primarily focused on mitigating catastrophic forgetting with fixed and limited storage allocation throughout the agent's lifetime. However, the growing affordability of data storage highlights a broad range of applications that do not adhere to these assumptions. In these cases, the primary concern lies in managing computational expenditures rather than storage. In this paper, we target such settings, investigating the online continual learning problem by relaxing storage constraints and emphasizing fixed, limited economical budget. We provide a simple algorithm that can compactly store and utilize the entirety of the incoming data stream under tiny computational budgets using a kNN classifier and universal pre-trained feature extractors. Our algorithm provides a consistency property attractive to continual learning: It will never forget past seen data. We set a new state of the art on two large-scale OCL datasets: Continual LOCalization (CLOC), which has 39M images over 712 classes, and Continual Google Landmarks V2 (CGLM), which has 580K images over 10,788 classes -- beating methods under far higher computational budgets than ours in terms of both reducing catastrophic forgetting of past data and quickly adapting to rapidly changing data streams. We provide code to reproduce our results at \url{https://github.com/drimpossible/ACM}.
Monocular Visual-Inertial Depth Estimation
Mar 21, 2023



We present a visual-inertial depth estimation pipeline that integrates monocular depth estimation and visual-inertial odometry to produce dense depth estimates with metric scale. Our approach performs global scale and shift alignment against sparse metric depth, followed by learning-based dense alignment. We evaluate on the TartanAir and VOID datasets, observing up to 30% reduction in inverse RMSE with dense scale alignment relative to performing just global alignment alone. Our approach is especially competitive at low density; with just 150 sparse metric depth points, our dense-to-dense depth alignment method achieves over 50% lower iRMSE over sparse-to-dense depth completion by KBNet, currently the state of the art on VOID. We demonstrate successful zero-shot transfer from synthetic TartanAir to real-world VOID data and perform generalization tests on NYUv2 and VCU-RVI. Our approach is modular and is compatible with a variety of monocular depth estimation models. Video: https://youtu.be/IMwiKwSpshQ Code: https://github.com/isl-org/VI-Depth
Improving information retention in large scale online continual learning
Oct 12, 2022



Given a stream of data sampled from non-stationary distributions, online continual learning (OCL) aims to adapt efficiently to new data while retaining existing knowledge. The typical approach to address information retention (the ability to retain previous knowledge) is keeping a replay buffer of a fixed size and computing gradients using a mixture of new data and the replay buffer. Surprisingly, the recent work (Cai et al., 2021) suggests that information retention remains a problem in large scale OCL even when the replay buffer is unlimited, i.e., the gradients are computed using all past data. This paper focuses on this peculiarity to understand and address information retention. To pinpoint the source of this problem, we theoretically show that, given limited computation budgets at each time step, even without strict storage limit, naively applying SGD with constant or constantly decreasing learning rates fails to optimize information retention in the long term. We propose using a moving average family of methods to improve optimization for non-stationary objectives. Specifically, we design an adaptive moving average (AMA) optimizer and a moving-average-based learning rate schedule (MALR). We demonstrate the effectiveness of AMA+MALR on large-scale benchmarks, including Continual Localization (CLOC), Google Landmarks, and ImageNet. Code will be released upon publication.
Guaranteed Conservation of Momentum for Learning Particle-based Fluid Dynamics
Oct 12, 2022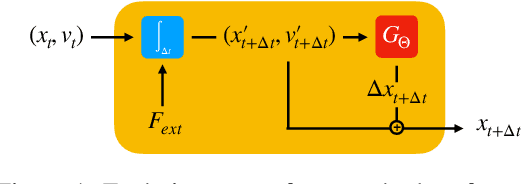
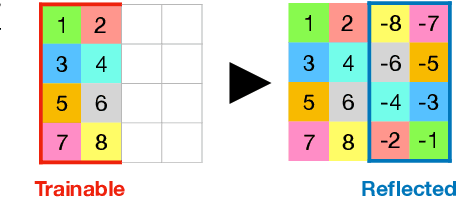
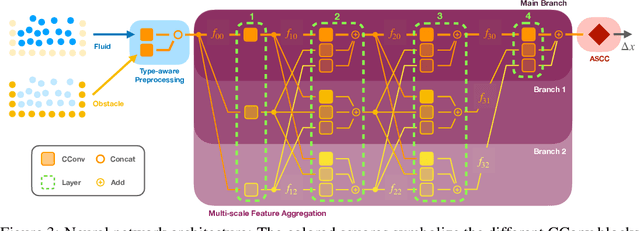
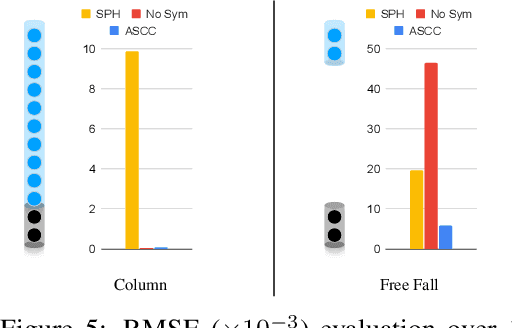
We present a novel method for guaranteeing linear momentum in learned physics simulations. Unlike existing methods, we enforce conservation of momentum with a hard constraint, which we realize via antisymmetrical continuous convolutional layers. We combine these strict constraints with a hierarchical network architecture, a carefully constructed resampling scheme, and a training approach for temporal coherence. In combination, the proposed method allows us to increase the physical accuracy of the learned simulator substantially. In addition, the induced physical bias leads to significantly better generalization performance and makes our method more reliable in unseen test cases. We evaluate our method on a range of different, challenging fluid scenarios. Among others, we demonstrate that our approach generalizes to new scenarios with up to one million particles. Our results show that the proposed algorithm can learn complex dynamics while outperforming existing approaches in generalization and training performance. An implementation of our approach is available at https://github.com/tum-pbs/DMCF.
Differentiable Simulation of Soft Multi-body Systems
May 03, 2022
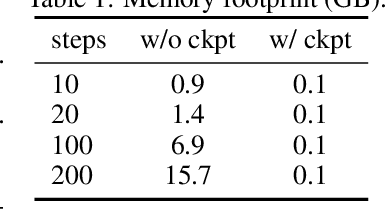

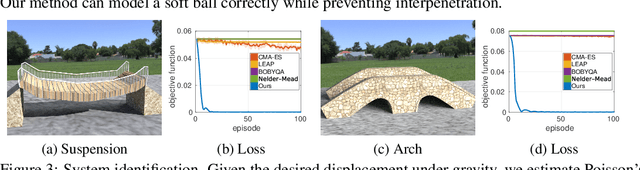
We present a method for differentiable simulation of soft articulated bodies. Our work enables the integration of differentiable physical dynamics into gradient-based pipelines. We develop a top-down matrix assembly algorithm within Projective Dynamics and derive a generalized dry friction model for soft continuum using a new matrix splitting strategy. We derive a differentiable control framework for soft articulated bodies driven by muscles, joint torques, or pneumatic tubes. The experiments demonstrate that our designs make soft body simulation more stable and realistic compared to other frameworks. Our method accelerates the solution of system identification problems by more than an order of magnitude, and enables efficient gradient-based learning of motion control with soft robots.
Unsupervised Contrastive Domain Adaptation for Semantic Segmentation
Apr 18, 2022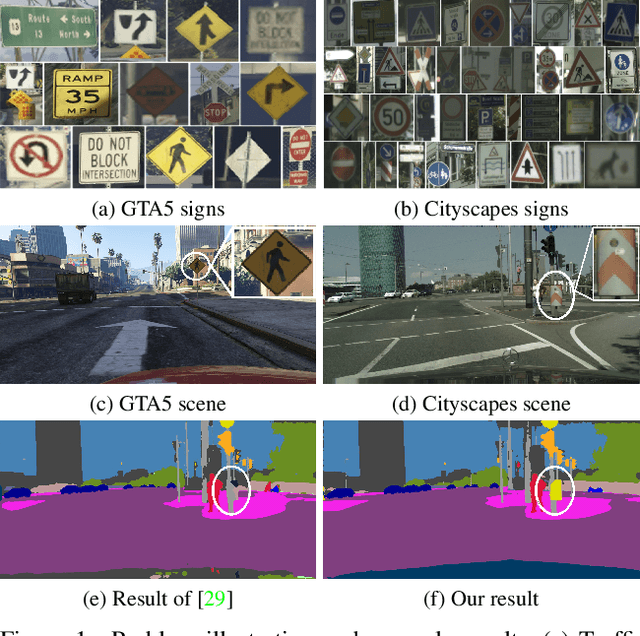
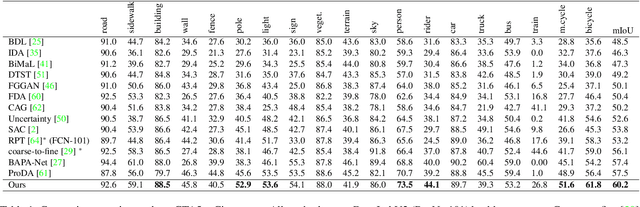
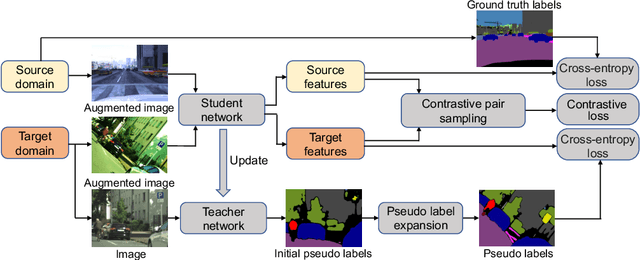
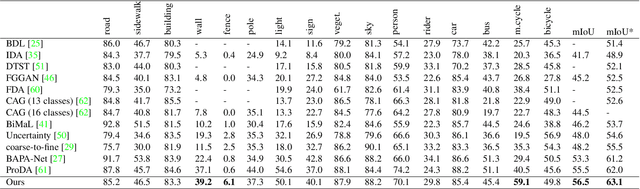
Semantic segmentation models struggle to generalize in the presence of domain shift. In this paper, we introduce contrastive learning for feature alignment in cross-domain adaptation. We assemble both in-domain contrastive pairs and cross-domain contrastive pairs to learn discriminative features that align across domains. Based on the resulting well-aligned feature representations we introduce a label expansion approach that is able to discover samples from hard classes during the adaptation process to further boost performance. The proposed approach consistently outperforms state-of-the-art methods for domain adaptation. It achieves 60.2% mIoU on the Cityscapes dataset when training on the synthetic GTA5 dataset together with unlabeled Cityscapes images.
Dancing under the stars: video denoising in starlight
Apr 08, 2022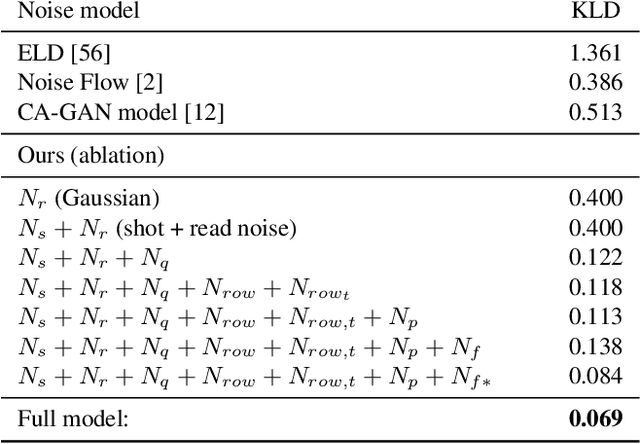
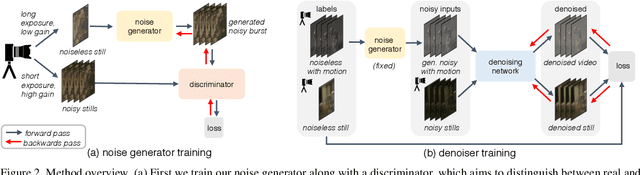
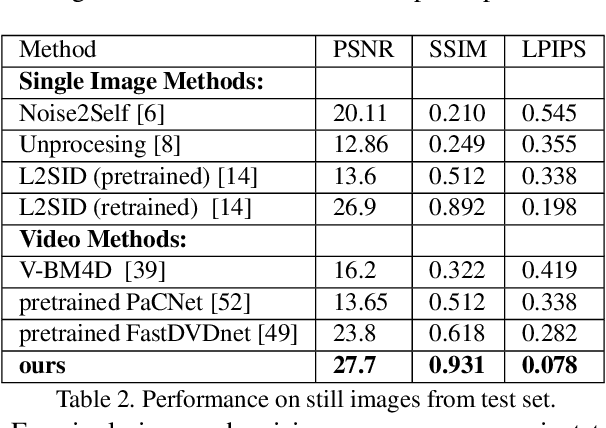
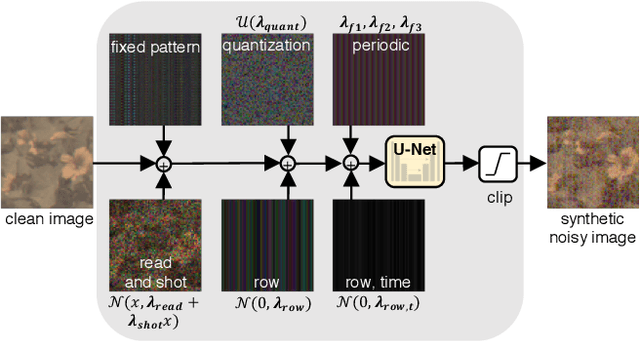
Imaging in low light is extremely challenging due to low photon counts. Using sensitive CMOS cameras, it is currently possible to take videos at night under moonlight (0.05-0.3 lux illumination). In this paper, we demonstrate photorealistic video under starlight (no moon present, $<$0.001 lux) for the first time. To enable this, we develop a GAN-tuned physics-based noise model to more accurately represent camera noise at the lowest light levels. Using this noise model, we train a video denoiser using a combination of simulated noisy video clips and real noisy still images. We capture a 5-10 fps video dataset with significant motion at approximately 0.6-0.7 millilux with no active illumination. Comparing against alternative methods, we achieve improved video quality at the lowest light levels, demonstrating photorealistic video denoising in starlight for the first time.
Global Tracking Transformers
Mar 24, 2022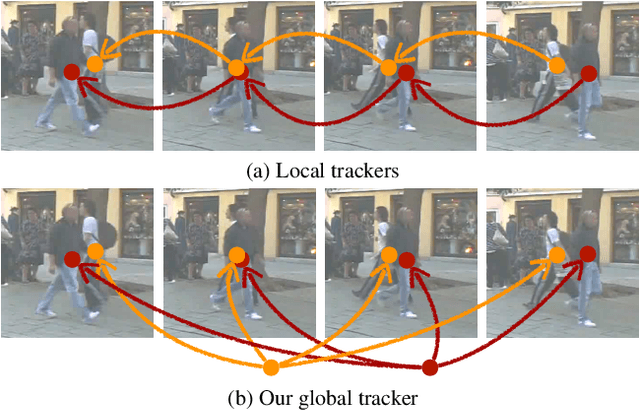
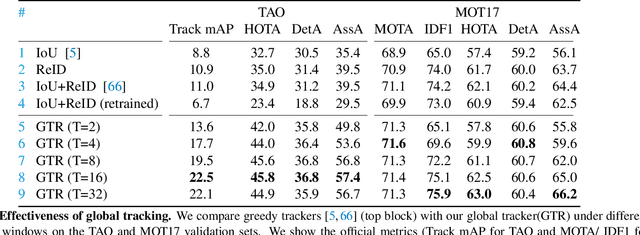
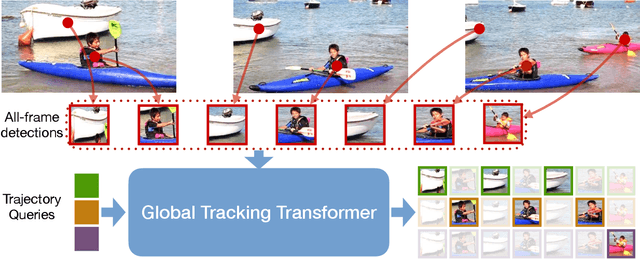
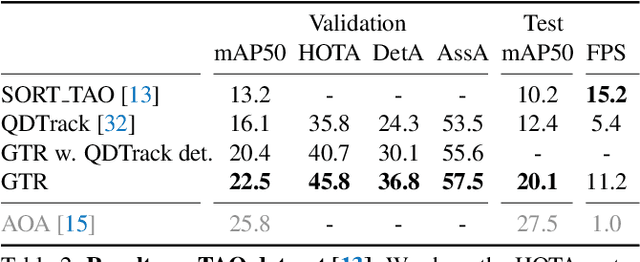
We present a novel transformer-based architecture for global multi-object tracking. Our network takes a short sequence of frames as input and produces global trajectories for all objects. The core component is a global tracking transformer that operates on objects from all frames in the sequence. The transformer encodes object features from all frames, and uses trajectory queries to group them into trajectories. The trajectory queries are object features from a single frame and naturally produce unique trajectories. Our global tracking transformer does not require intermediate pairwise grouping or combinatorial association, and can be jointly trained with an object detector. It achieves competitive performance on the popular MOT17 benchmark, with 75.3 MOTA and 59.1 HOTA. More importantly, our framework seamlessly integrates into state-of-the-art large-vocabulary detectors to track any objects. Experiments on the challenging TAO dataset show that our framework consistently improves upon baselines that are based on pairwise association, outperforming published works by a significant 7.7 tracking mAP. Code is available at https://github.com/xingyizhou/GTR.