 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeSeeThrough3D: Occlusion Aware 3D Control in Text-to-Image Generation
Feb 26, 2026We identify occlusion reasoning as a fundamental yet overlooked aspect for 3D layout-conditioned generation. It is essential for synthesizing partially occluded objects with depth-consistent geometry and scale. While existing methods can generate realistic scenes that follow input layouts, they often fail to model precise inter-object occlusions. We propose SeeThrough3D, a model for 3D layout conditioned generation that explicitly models occlusions. We introduce an occlusion-aware 3D scene representation (OSCR), where objects are depicted as translucent 3D boxes placed within a virtual environment and rendered from desired camera viewpoint. The transparency encodes hidden object regions, enabling the model to reason about occlusions, while the rendered viewpoint provides explicit camera control during generation. We condition a pretrained flow based text-to-image image generation model by introducing a set of visual tokens derived from our rendered 3D representation. Furthermore, we apply masked self-attention to accurately bind each object bounding box to its corresponding textual description, enabling accurate generation of multiple objects without object attribute mixing. To train the model, we construct a synthetic dataset with diverse multi-object scenes with strong inter-object occlusions. SeeThrough3D generalizes effectively to unseen object categories and enables precise 3D layout control with realistic occlusions and consistent camera control.
Compass Control: Multi Object Orientation Control for Text-to-Image Generation
Apr 10, 2025



Existing approaches for controlling text-to-image diffusion models, while powerful, do not allow for explicit 3D object-centric control, such as precise control of object orientation. In this work, we address the problem of multi-object orientation control in text-to-image diffusion models. This enables the generation of diverse multi-object scenes with precise orientation control for each object. The key idea is to condition the diffusion model with a set of orientation-aware \textbf{compass} tokens, one for each object, along with text tokens. A light-weight encoder network predicts these compass tokens taking object orientation as the input. The model is trained on a synthetic dataset of procedurally generated scenes, each containing one or two 3D assets on a plain background. However, direct training this framework results in poor orientation control as well as leads to entanglement among objects. To mitigate this, we intervene in the generation process and constrain the cross-attention maps of each compass token to its corresponding object regions. The trained model is able to achieve precise orientation control for a) complex objects not seen during training and b) multi-object scenes with more than two objects, indicating strong generalization capabilities. Further, when combined with personalization methods, our method precisely controls the orientation of the new object in diverse contexts. Our method achieves state-of-the-art orientation control and text alignment, quantified with extensive evaluations and a user study.
Towards Global Localization using Multi-Modal Object-Instance Re-Identification
Sep 18, 2024Re-identification (ReID) is a critical challenge in computer vision, predominantly studied in the context of pedestrians and vehicles. However, robust object-instance ReID, which has significant implications for tasks such as autonomous exploration, long-term perception, and scene understanding, remains underexplored. In this work, we address this gap by proposing a novel dual-path object-instance re-identification transformer architecture that integrates multimodal RGB and depth information. By leveraging depth data, we demonstrate improvements in ReID across scenes that are cluttered or have varying illumination conditions. Additionally, we develop a ReID-based localization framework that enables accurate camera localization and pose identification across different viewpoints. We validate our methods using two custom-built RGB-D datasets, as well as multiple sequences from the open-source TUM RGB-D datasets. Our approach demonstrates significant improvements in both object instance ReID (mAP of 75.18) and localization accuracy (success rate of 83% on TUM-RGBD), highlighting the essential role of object ReID in advancing robotic perception. Our models, frameworks, and datasets have been made publicly available.
A Robot Cluster for Reproducible Research in Dexterous Manipulation
Sep 22, 2021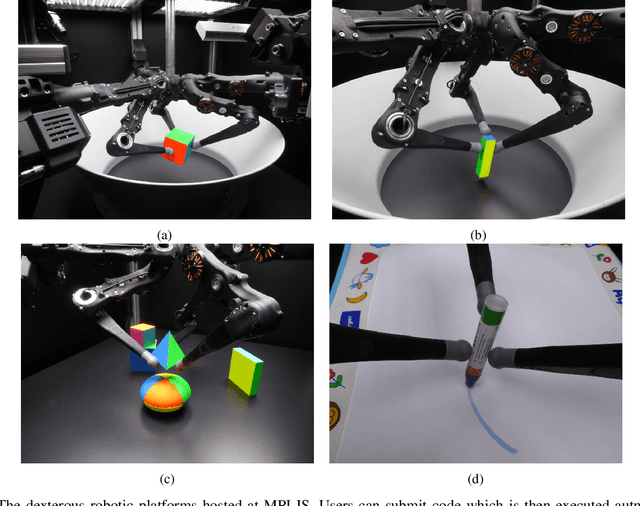
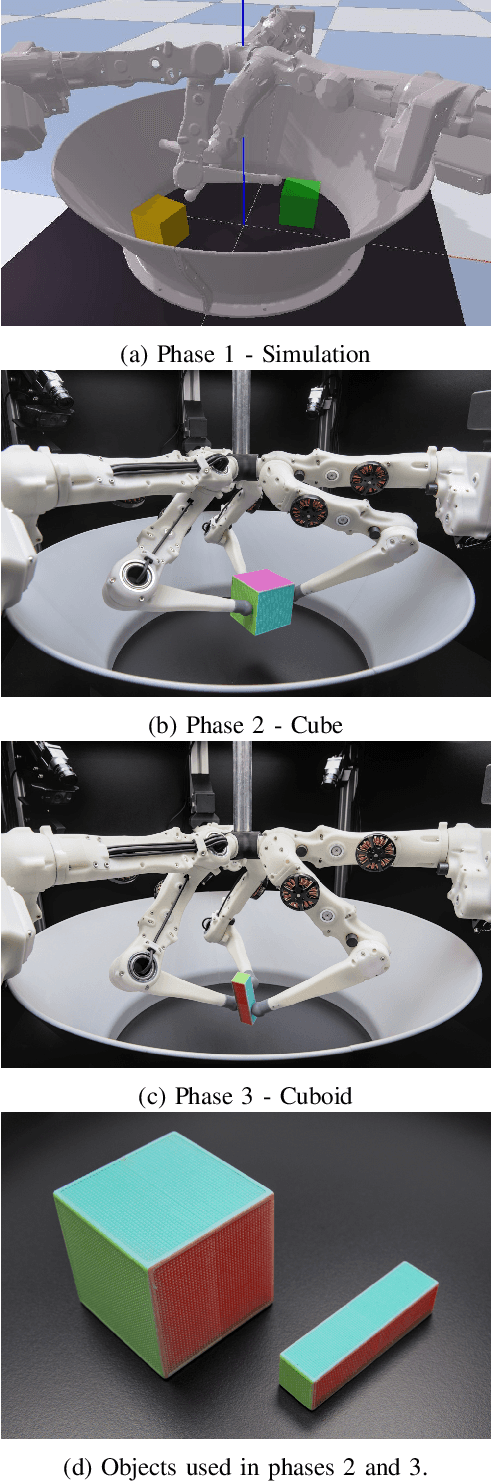
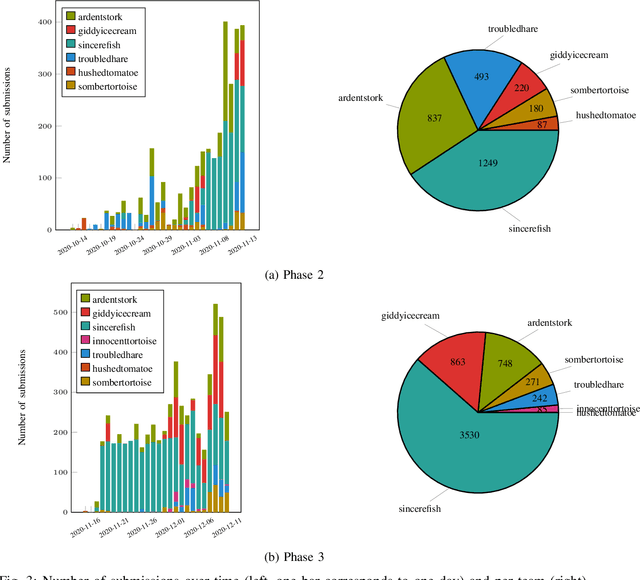
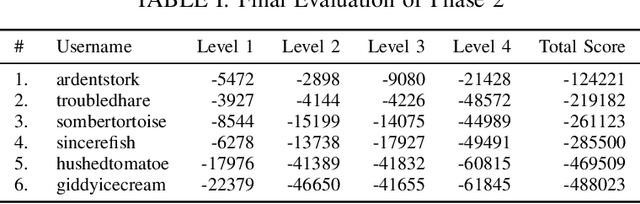
Dexterous manipulation remains an open problem in robotics. To coordinate efforts of the research community towards tackling this problem, we propose a shared benchmark. We designed and built robotic platforms that are hosted at the MPI-IS and can be accessed remotely. Each platform consists of three robotic fingers that are capable of dexterous object manipulation. Users are able to control the platforms remotely by submitting code that is executed automatically, akin to a computational cluster. Using this setup, i) we host robotics competitions, where teams from anywhere in the world access our platforms to tackle challenging tasks, ii) we publish the datasets collected during these competitions (consisting of hundreds of robot hours), and iii) we give researchers access to these platforms for their own projects.
On the Transfer of Disentangled Representations in Realistic Settings
Oct 27, 2020


Learning meaningful representations that disentangle the underlying structure of the data generating process is considered to be of key importance in machine learning. While disentangled representations were found to be useful for diverse tasks such as abstract reasoning and fair classification, their scalability and real-world impact remain questionable. We introduce a new high-resolution dataset with 1M simulated images and over 1,800 annotated real-world images of the same robotic setup. In contrast to previous work, this new dataset exhibits correlations, a complex underlying structure, and allows to evaluate transfer to unseen simulated and real-world settings where the encoder i) remains in distribution or ii) is out of distribution. We propose new architectures in order to scale disentangled representation learning to realistic high-resolution settings and conduct a large-scale empirical study of disentangled representations on this dataset. We observe that disentanglement is a good predictor for out-of-distribution (OOD) task performance.
TriFinger: An Open-Source Robot for Learning Dexterity
Aug 08, 2020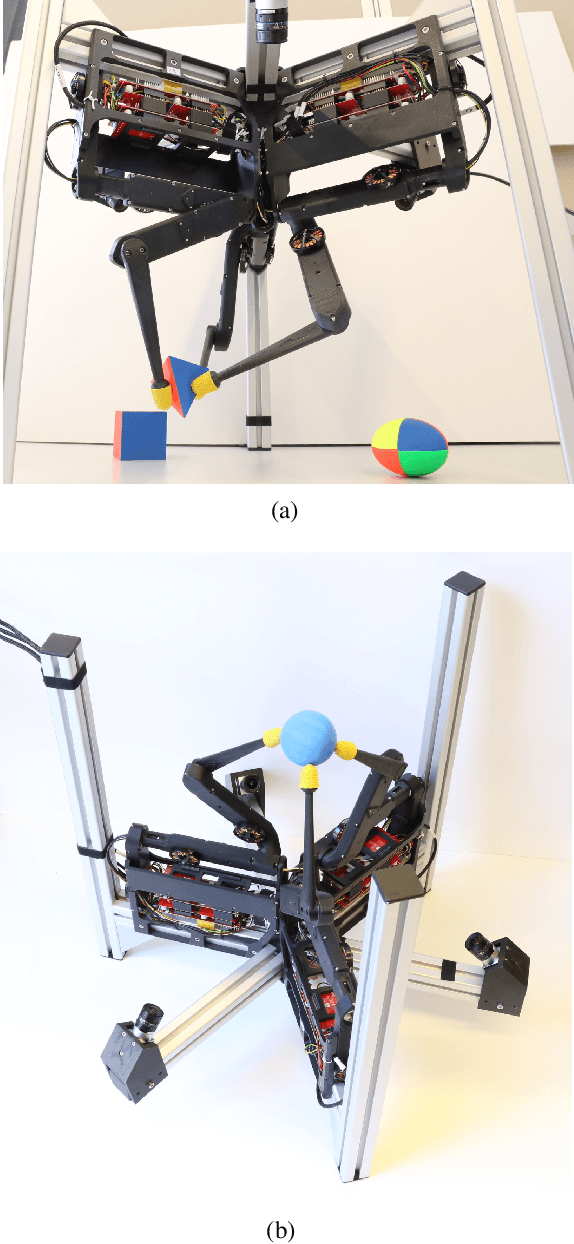
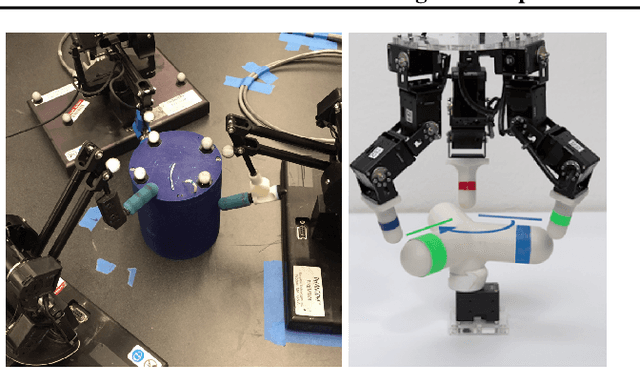
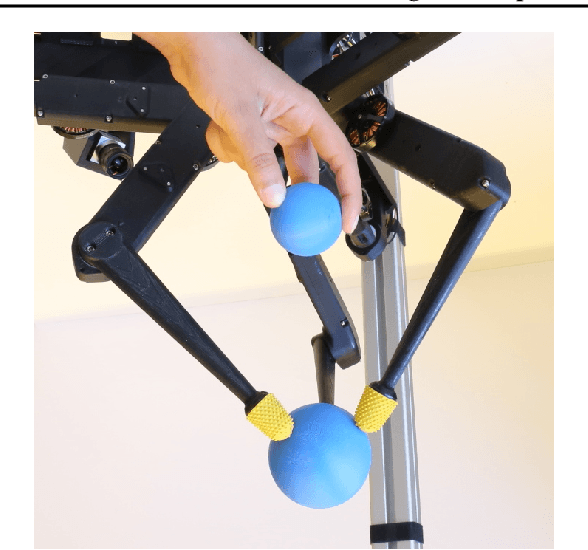
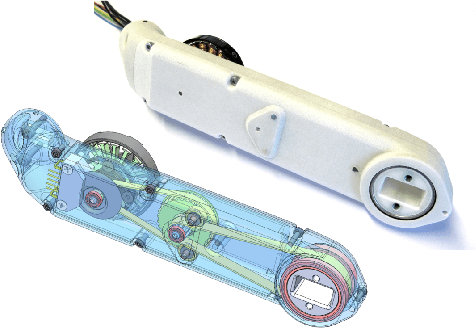
Dexterous object manipulation remains an open problem in robotics, despite the rapid progress in machine learning during the past decade. We argue that a hindrance is the high cost of experimentation on real systems, in terms of both time and money. We address this problem by proposing an open-source robotic platform which can safely operate without human supervision. The hardware is inexpensive (about \SI{5000}[\$]{}) yet highly dynamic, robust, and capable of complex interaction with external objects. The software operates at 1-kilohertz and performs safety checks to prevent the hardware from breaking. The easy-to-use front-end (in C++ and Python) is suitable for real-time control as well as deep reinforcement learning. In addition, the software framework is largely robot-agnostic and can hence be used independently of the hardware proposed herein. Finally, we illustrate the potential of the proposed platform through a number of experiments, including real-time optimal control, deep reinforcement learning from scratch, throwing, and writing.