 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeVisual-Inertial and Leg Odometry Fusion for Dynamic Locomotion
Oct 10, 2022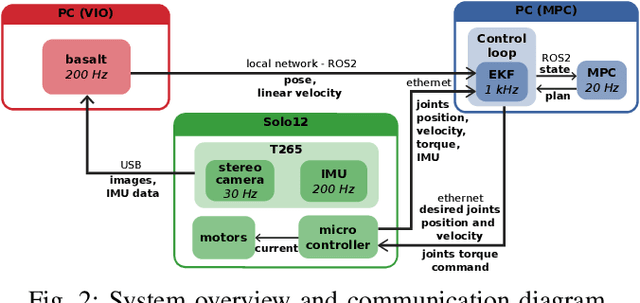
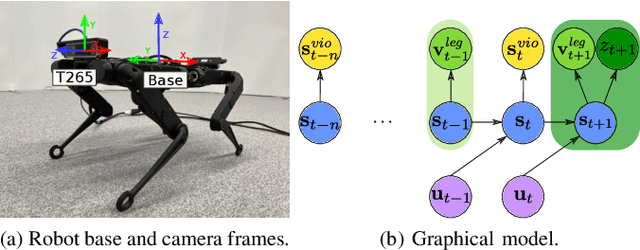
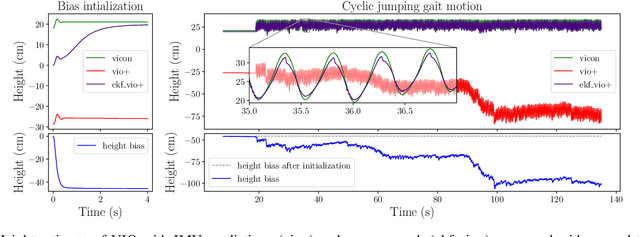
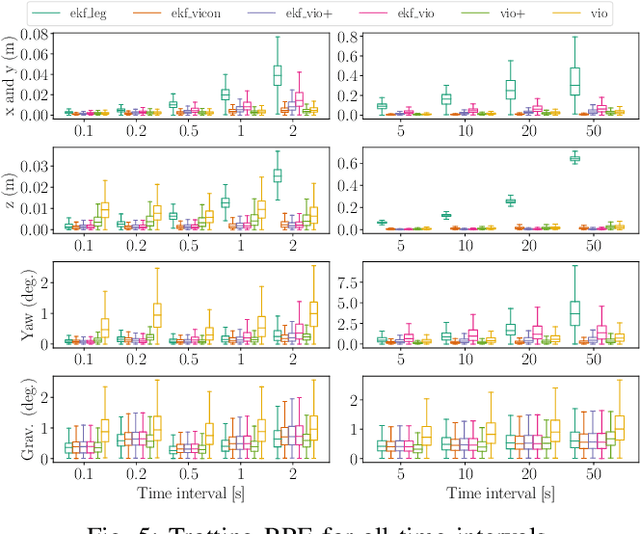
Implementing dynamic locomotion behaviors on legged robots requires a high-quality state estimation module. Especially when the motion includes flight phases, state-of-the-art approaches fail to produce reliable estimation of the robot posture, in particular base height. In this paper, we propose a novel approach for combining visual-inertial odometry (VIO) with leg odometry in an extended Kalman filter (EKF) based state estimator. The VIO module uses a stereo camera and IMU to yield low-drift 3D position and yaw orientation and drift-free pitch and roll orientation of the robot base link in the inertial frame. However, these values have a considerable amount of latency due to image processing and optimization, while the rate of update is quite low which is not suitable for low-level control. To reduce the latency, we predict the VIO state estimate at the rate of the IMU measurements of the VIO sensor. The EKF module uses the base pose and linear velocity predicted by VIO, fuses them further with a second high-rate IMU and leg odometry measurements, and produces robot state estimates with a high frequency and small latency suitable for control. We integrate this lightweight estimation framework with a nonlinear model predictive controller and show successful implementation of a set of agile locomotion behaviors, including trotting and jumping at varying horizontal speeds, on a torque-controlled quadruped robot.
Learning Agile Skills via Adversarial Imitation of Rough Partial Demonstrations
Jun 23, 2022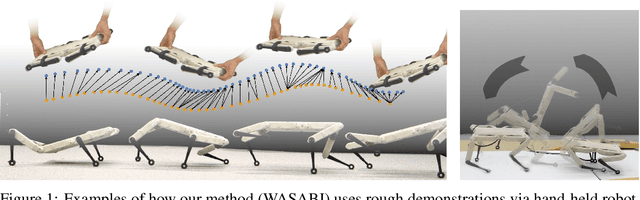
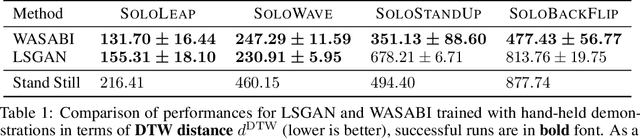
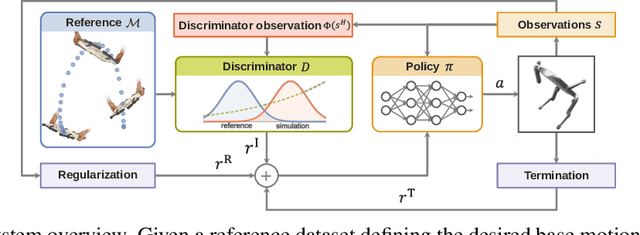

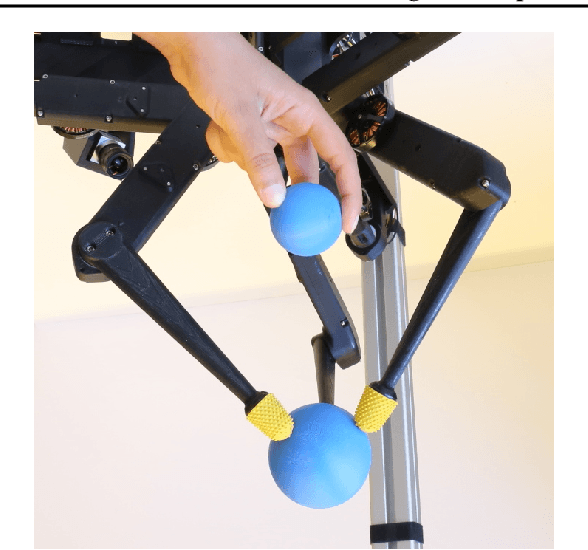
Learning agile skills is one of the main challenges in robotics. To this end, reinforcement learning approaches have achieved impressive results. These methods require explicit task information in terms of a reward function or an expert that can be queried in simulation to provide a target control output, which limits their applicability. In this work, we propose a generative adversarial method for inferring reward functions from partial and potentially physically incompatible demonstrations for successful skill acquirement where reference or expert demonstrations are not easily accessible. Moreover, we show that by using a Wasserstein GAN formulation and transitions from demonstrations with rough and partial information as input, we are able to extract policies that are robust and capable of imitating demonstrated behaviors. Finally, the obtained skills such as a backflip are tested on an agile quadruped robot called Solo 8 and present faithful replication of hand-held human demonstrations.
Bipedal Walking Control using Variable Horizon MPC
Oct 16, 2020
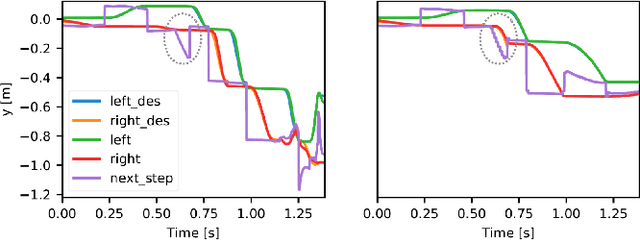
In this paper, we present a novel two-level variable Horizon Model Predictive Control (VH-MPC) framework for bipedal locomotion. In this framework, the higher level computes the landing location and timing (horizon length) of the swing foot to stabilize the unstable part of the center of mass (CoM) dynamics, using feedback from the CoM state. The lower level takes into account the swing foot dynamics and generates dynamically consistent trajectories for landing at the desired time as close as possible to the desired location. To do that, we use a simplified model of the robot dynamics projected in swing foot space that takes into account joint torque constraints as well as the friction cone constraints of the stance foot. We show the effectiveness of our proposed control framework by implementing robust walking patterns on our torque-controlled and open-source biped robot, Bolt. We report extensive simulations and real robot experiments in the presence of various disturbances and uncertainties.
TriFinger: An Open-Source Robot for Learning Dexterity
Aug 08, 2020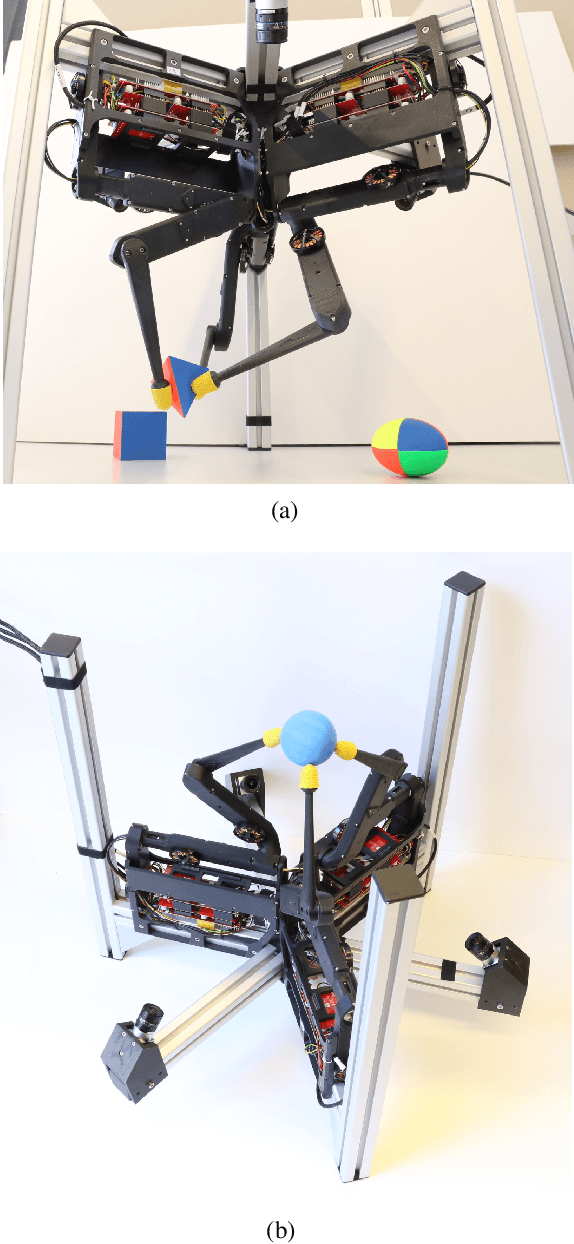
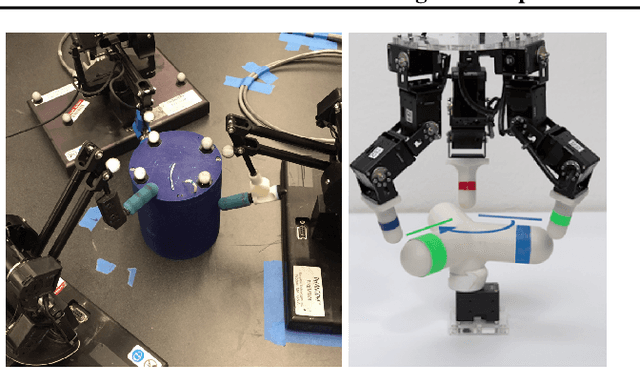
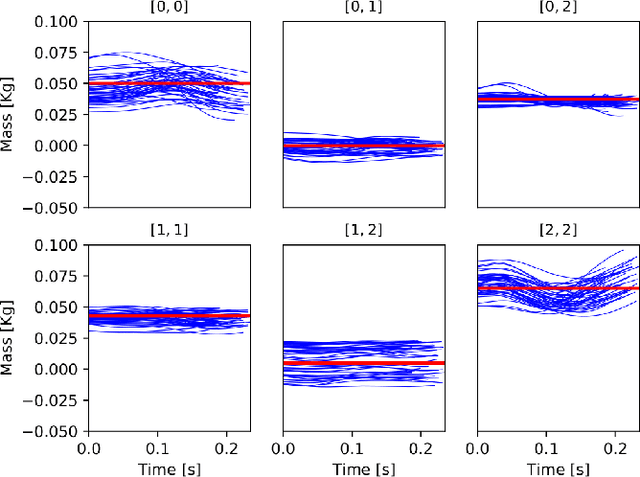
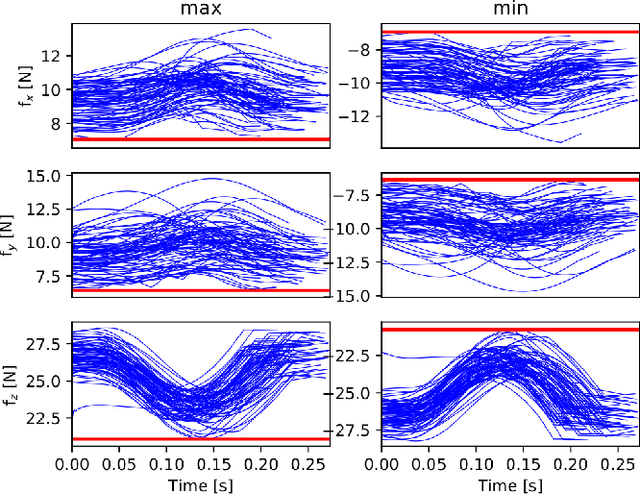
Dexterous object manipulation remains an open problem in robotics, despite the rapid progress in machine learning during the past decade. We argue that a hindrance is the high cost of experimentation on real systems, in terms of both time and money. We address this problem by proposing an open-source robotic platform which can safely operate without human supervision. The hardware is inexpensive (about \SI{5000}[\$]{}) yet highly dynamic, robust, and capable of complex interaction with external objects. The software operates at 1-kilohertz and performs safety checks to prevent the hardware from breaking. The easy-to-use front-end (in C++ and Python) is suitable for real-time control as well as deep reinforcement learning. In addition, the software framework is largely robot-agnostic and can hence be used independently of the hardware proposed herein. Finally, we illustrate the potential of the proposed platform through a number of experiments, including real-time optimal control, deep reinforcement learning from scratch, throwing, and writing.
An Open Torque-Controlled Modular Robot Architecture for Legged Locomotion Research
Sep 30, 2019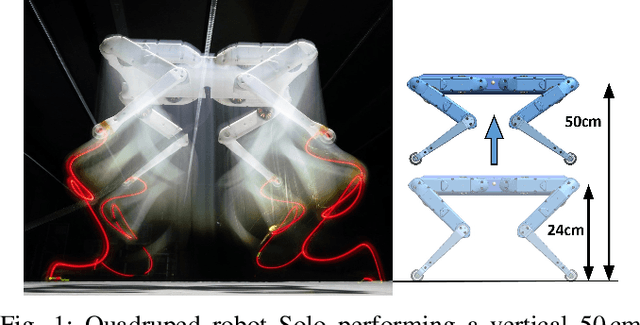
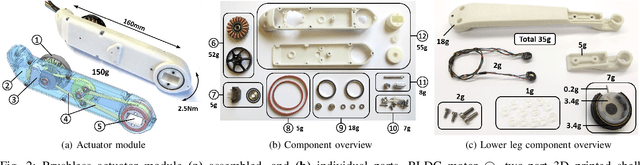
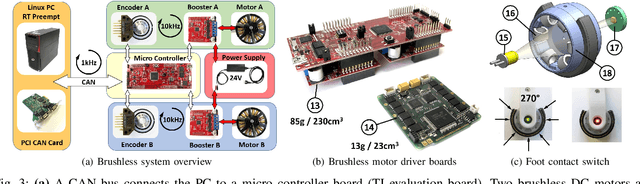
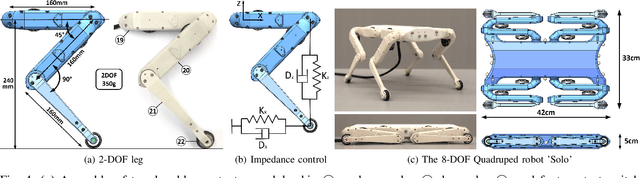
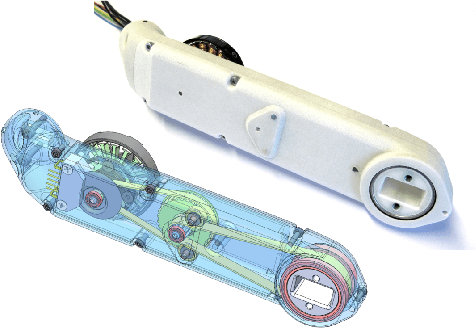
We present a new open-source torque-controlled legged robot system, with a low cost and low complexity actuator module at its core. It consists of a low-weight high torque brushless DC motor and a low gear ratio transmission suitable for impedance and force control. We also present a novel foot contact sensor suitable for legged locomotion with hard impacts. A 2.2 kg quadruped robot with a large range of motion is assembled from 8 identical actuator modules and 4 lower legs with foot contact sensors. To the best of our knowledge, it is the most lightest force-controlled quadruped robot. We leverage standard plastic 3D printing and off-the-shelf parts, resulting in light-weight and inexpensive robots, allowing for rapid distribution and duplication within the research community. In order to quantify the capabilities of our design, we systematically measure the achieved impedance at the foot in static and dynamic scenarios. We measured up to 10.8 dimensionless leg stiffness without active damping, which is comparable to the leg stiffness of a running human. Finally, in order to demonstrate the capabilities of our quadruped robot, we propose a novel controller which combines feedforward contact forces computed from a kino-dynamic optimizer with impedance control of the robot center of mass and base orientation. The controller is capable of regulating complex motions which are robust to environmental uncertainty.
Momentum Control with Hierarchical Inverse Dynamics on a Torque-Controlled Humanoid
Aug 07, 2015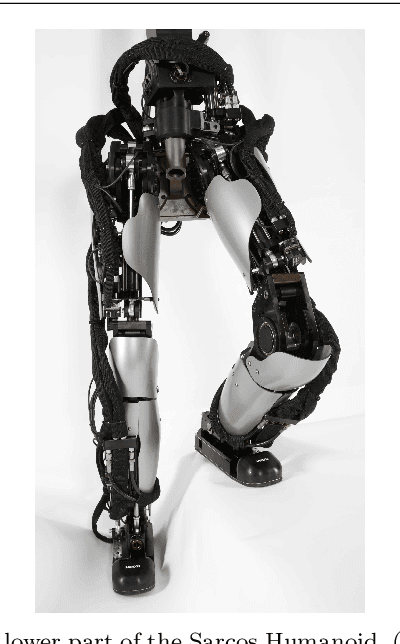
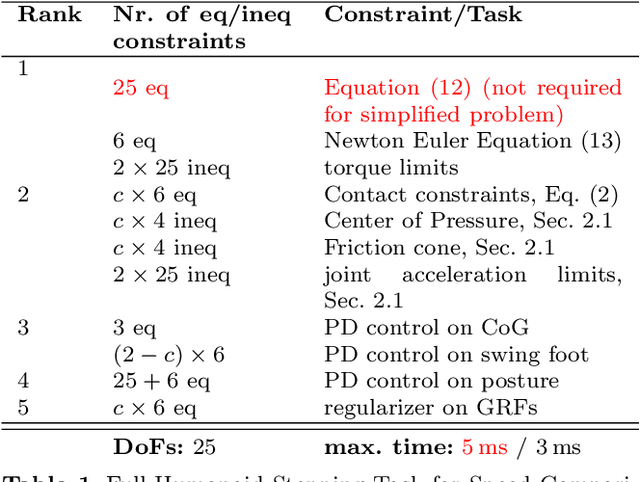
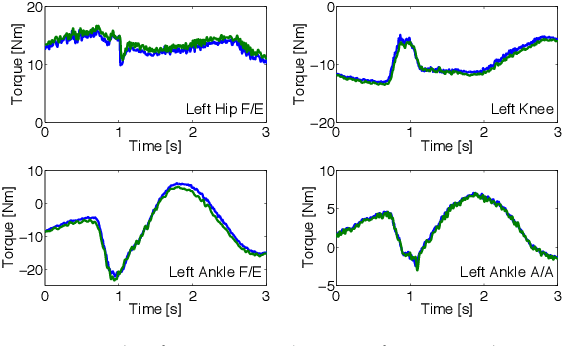
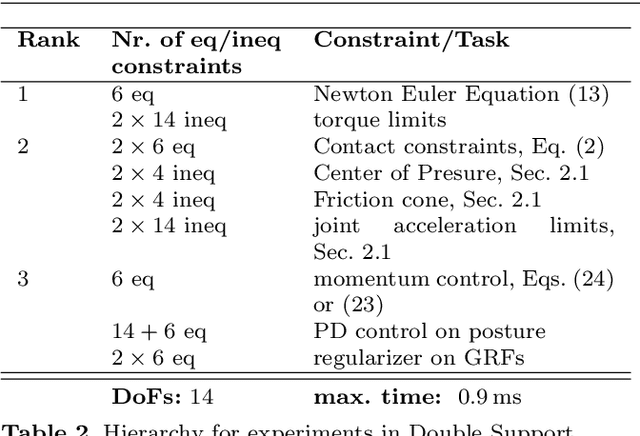
Hierarchical inverse dynamics based on cascades of quadratic programs have been proposed for the control of legged robots. They have important benefits but to the best of our knowledge have never been implemented on a torque controlled humanoid where model inaccuracies, sensor noise and real-time computation requirements can be problematic. Using a reformulation of existing algorithms, we propose a simplification of the problem that allows to achieve real-time control. Momentum-based control is integrated in the task hierarchy and a LQR design approach is used to compute the desired associated closed-loop behavior and improve performance. Extensive experiments on various balancing and tracking tasks show very robust performance in the face of unknown disturbances, even when the humanoid is standing on one foot. Our results demonstrate that hierarchical inverse dynamics together with momentum control can be efficiently used for feedback control under real robot conditions.
Balancing experiments on a torque-controlled humanoid with hierarchical inverse dynamics
Nov 07, 2014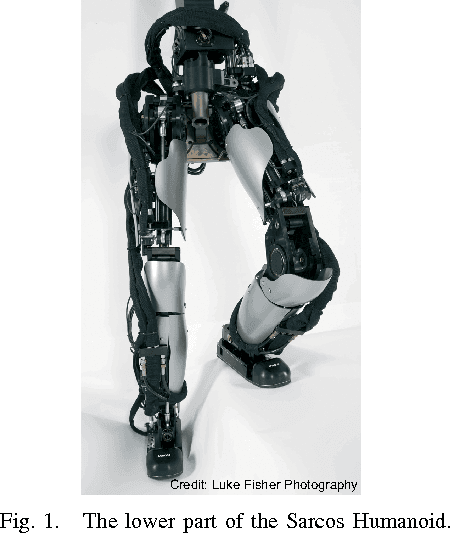
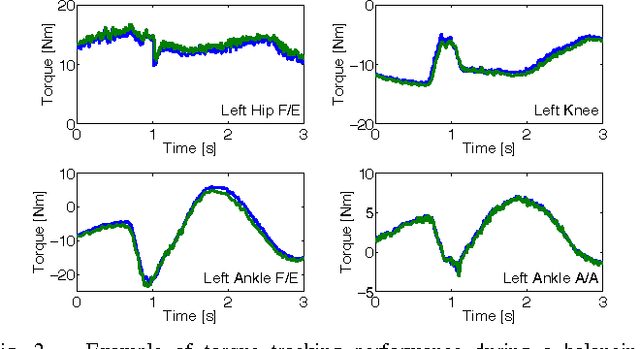
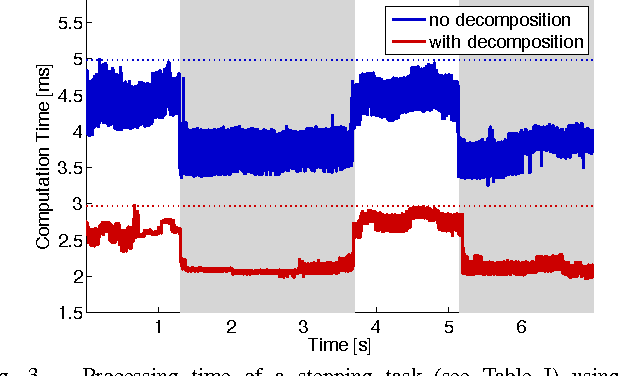
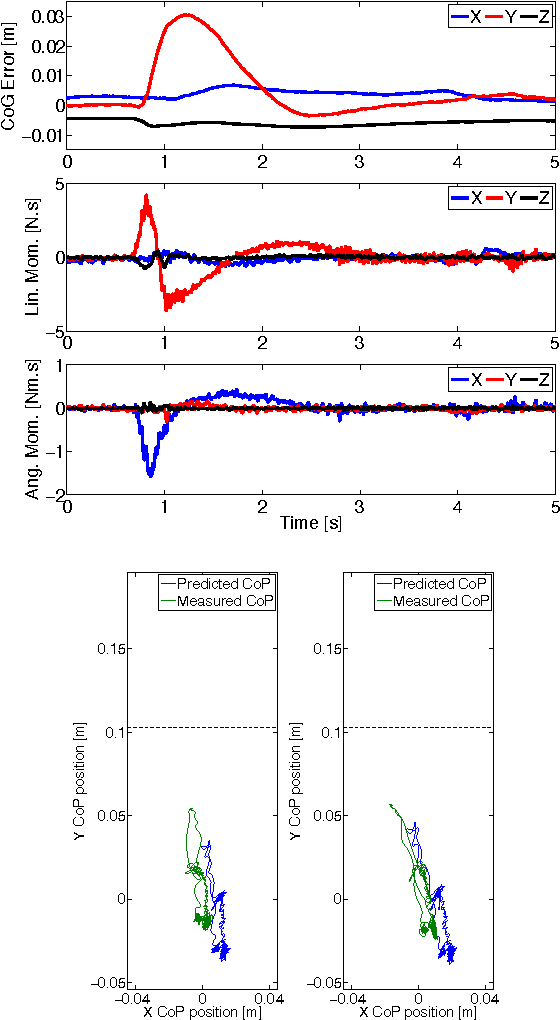
Recently several hierarchical inverse dynamics controllers based on cascades of quadratic programs have been proposed for application on torque controlled robots. They have important theoretical benefits but have never been implemented on a torque controlled robot where model inaccuracies and real-time computation requirements can be problematic. In this contribution we present an experimental evaluation of these algorithms in the context of balance control for a humanoid robot. The presented experiments demonstrate the applicability of the approach under real robot conditions (i.e. model uncertainty, estimation errors, etc). We propose a simplification of the optimization problem that allows us to decrease computation time enough to implement it in a fast torque control loop. We implement a momentum-based balance controller which shows robust performance in face of unknown disturbances, even when the robot is standing on only one foot. In a second experiment, a tracking task is evaluated to demonstrate the performance of the controller with more complicated hierarchies. Our results show that hierarchical inverse dynamics controllers can be used for feedback control of humanoid robots and that momentum-based balance control can be efficiently implemented on a real robot.