 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeEarly Exiting U-Net for Efficient Processing on UAVs: A Case Study in Environmental Monitoring
Apr 15, 2026Oil spills represent a severe threat, making early-stage thickness estimation crucial for guiding remediation efforts. Unmanned Aerial Vehicles (UAVs) are an attractive platform for environmental monitoring. However, due to their limited computation and power budgets, real-time onboard processing requires optimized algorithms or lightweight machine learning models. While the standard U-Net architecture is often too large for constrained UAV hardware, the compressed Tiny U-Net variant fits on FPGA platforms and achieves competitive estimation performance (0.79 in the metric Intersection over Union, or IoU). Despite this success, Tiny U-Net processes every radar image through the complete inference pipeline, resulting in unnecessary computation for simple cases. To address this inefficiency, we integrate an early exit feature into the Tiny U-Net architecture. We introduce an early exit branch that returns an early prediction when a compact confidence score exceeds a tunable threshold, bypassing deeper layers for high-confidence evaluations. Our experiments demonstrate that this design achieves comparable IoU to the full baseline model. Crucially, the technique is shown to reduce the average number of multiplications by up to 42% for an aggressive threshold, reducing the dynamic power consumption. Choosing a threshold that ensures extreme confidence reduces the complexity-reduction gains for an improved IoU. This early exit approach substantially improves computational efficiency in Tiny U-Net, enabling more practical deployment in UAV-based environmental monitoring systems.
System Design of the Ultra Mobility Vehicle: A Driving, Balancing, and Jumping Bicycle Robot
Feb 25, 2026Trials cyclists and mountain bike riders can hop, jump, balance, and drive on one or both wheels. This versatility allows them to achieve speed and energy-efficiency on smooth terrain and agility over rough terrain. Inspired by these athletes, we present the design and control of a robotic platform, Ultra Mobility Vehicle (UMV), which combines a bicycle and a reaction mass to move dynamically with minimal actuated degrees of freedom. We employ a simulation-driven design optimization process to synthesize a spatial linkage topology with a focus on vertical jump height and momentum-based balancing on a single wheel contact. Using a constrained Reinforcement Learning (RL) framework, we demonstrate zero-shot transfer of diverse athletic behaviors, including track-stands, jumps, wheelies, rear wheel hopping, and front flips. This 23.5 kg robot is capable of high speeds (8 m/s) and jumping on and over large obstacles (1 m tall, or 130% of the robot's nominal height).
Smart Environmental Monitoring of Marine Pollution using Edge AI
Apr 30, 2025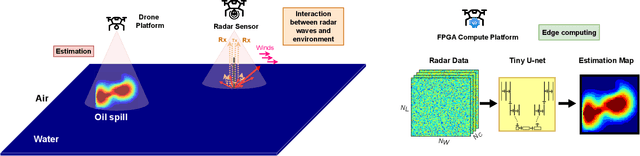
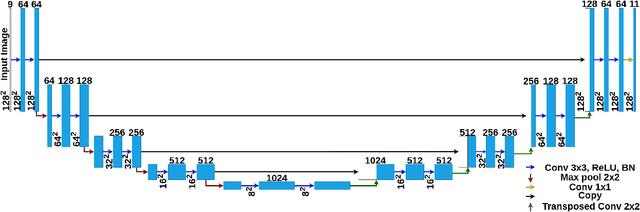
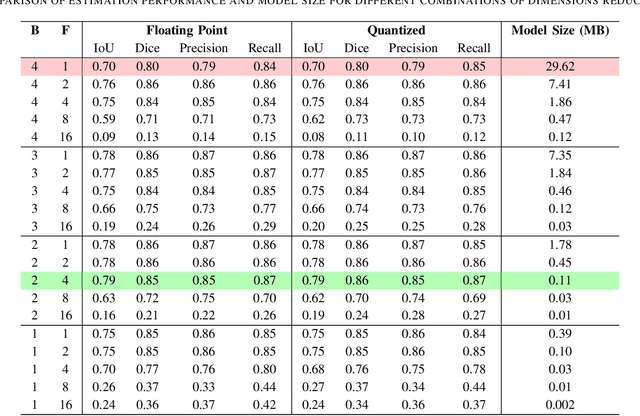
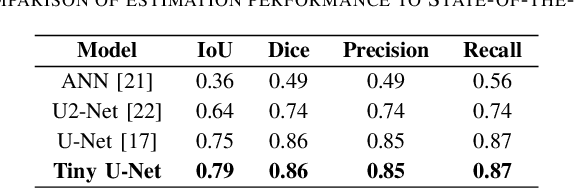
Oil spill incidents pose severe threats to marine ecosystems and coastal environments, necessitating rapid detection and monitoring capabilities to mitigate environmental damage. In this paper, we demonstrate how artificial intelligence, despite the inherent high computational and memory requirements, can be efficiently integrated into marine pollution monitoring systems. More precisely, we propose a drone-based smart monitoring system leveraging a compressed deep learning U-Net architecture for oil spill detection and thickness estimation. Compared to the standard U-Net architecture, the number of convolution blocks and channels per block are modified. The new model is then trained on synthetic radar data to accurately predict thick oil slick thickness up to 10 mm. Results show that our optimized Tiny U-Net achieves superior performance with an Intersection over Union (IoU) metric of approximately 79%, while simultaneously reducing the model size by a factor of $\sim$269x compared to the state-of-the-art. This significant model compression enables efficient edge computing deployment on field-programmable gate array (FPGA) hardware integrated directly into the drone platform. Hardware implementation demonstrates near real-time thickness estimation capabilities with a run-time power consumption of approximately 2.2 watts. Our findings highlight the increasing potential of smart monitoring technologies and efficient edge computing for operational characterization in marine environments.
Efficient FPGA Implementation of an Optimized SNN-based DFE for Optical Communications
Sep 13, 2024The ever-increasing demand for higher data rates in communication systems intensifies the need for advanced non-linear equalizers capable of higher performance. Recently artificial neural networks (ANNs) were introduced as a viable candidate for advanced non-linear equalizers, as they outperform traditional methods. However, they are computationally complex and therefore power hungry. Spiking neural networks (SNNs) started to gain attention as an energy-efficient alternative to ANNs. Recent works proved that they can outperform ANNs at this task. In this work, we explore the design space of an SNN-based decision-feedback equalizer (DFE) to reduce its computational complexity for an efficient implementation on field programmable gate array (FPGA). Our Results prove that it achieves higher communication performance than ANN-based DFE at roughly the same throughput and at 25X higher energy efficiency.
A Hybrid Approach combining ANN-based and Conventional Demapping in Communication for Efficient FPGA-Implementation
Apr 11, 2023In communication systems, Autoencoder (AE) refers to the concept of replacing parts of the transmitter and receiver by artificial neural networks (ANNs) to train the system end-to-end over a channel model. This approach aims to improve communication performance, especially for varying channel conditions, with the cost of high computational complexity for training and inference. Field-programmable gate arrays (FPGAs) have been shown to be a suitable platform for energy-efficient ANN implementation. However, the high number of operations and the large model size of ANNs limit the performance on resource-constrained devices, which is critical for low latency and high-throughput communication systems. To tackle his challenge, we propose a novel approach for efficient ANN-based remapping on FPGAs, which combines the adaptability of the AE with the efficiency of conventional demapping algorithms. After adaption to channel conditions, the channel characteristics, implicitly learned by the ANN, are extracted to enable the use of optimized conventional demapping algorithms for inference. We validate the hardware efficiency of our approach by providing FPGA implementation results and by comparing the communication performance to that of conventional systems. Our work opens a door for the practical application of ANN-based communication algorithms on FPGAs.
* Available at: https://ieeexplore.ieee.org/document/9835699
Fast and Accurate Multi-Body Simulation with Stiff Viscoelastic Contacts
Jan 18, 2021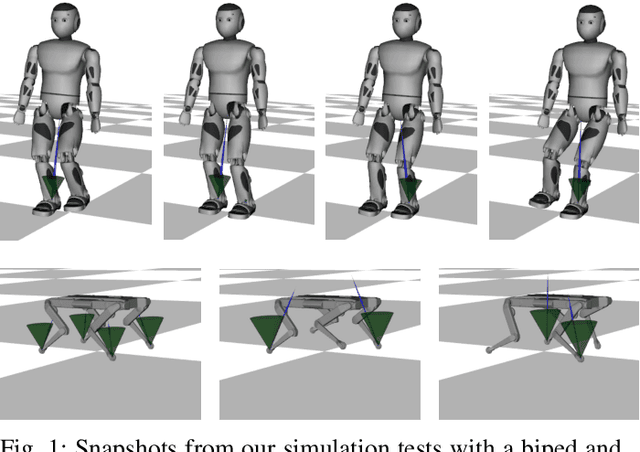
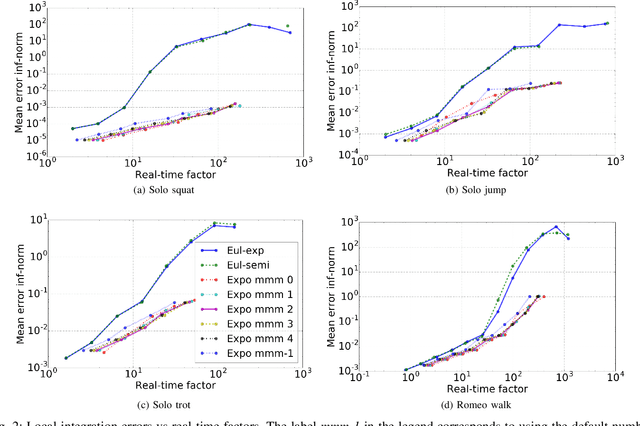
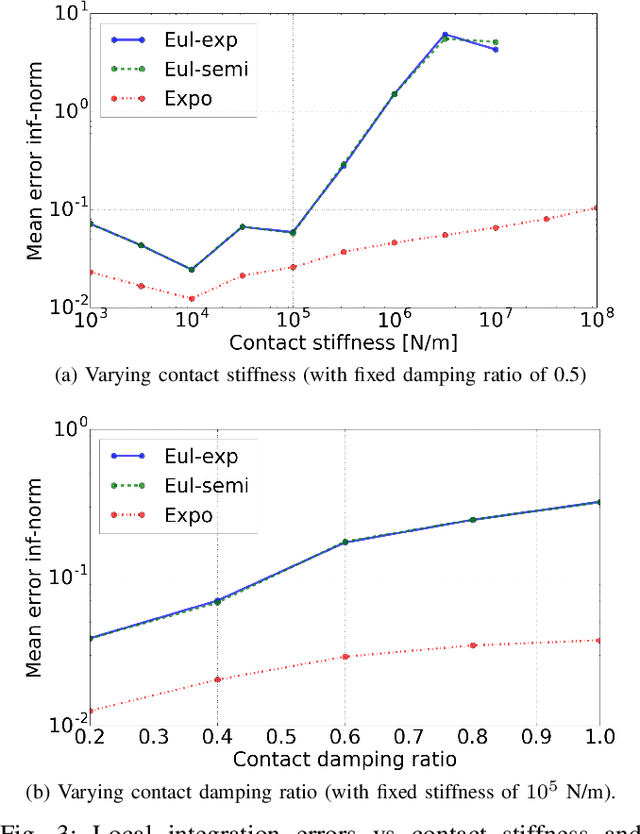
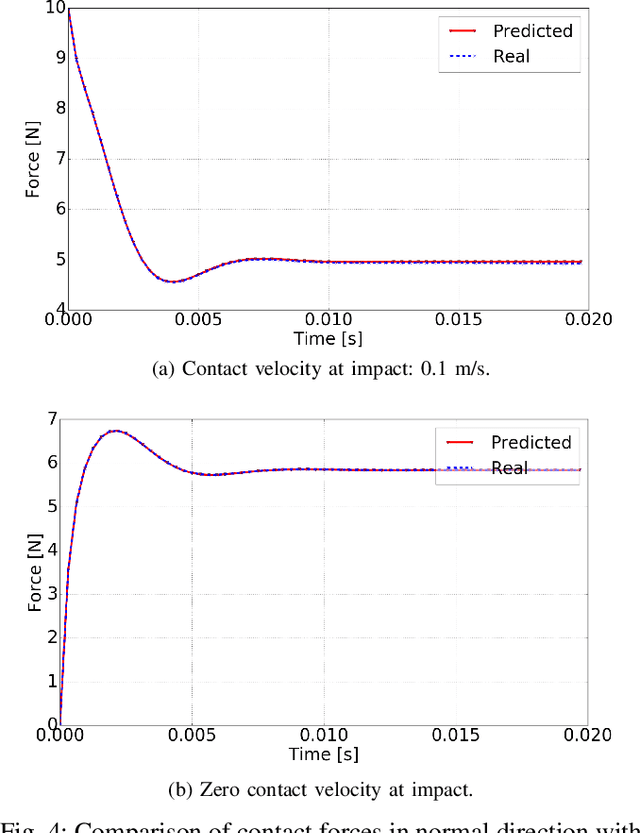
The simulation of multi-body systems with frictional contacts is a fundamental tool for many fields, such as robotics, computer graphics, and mechanics. Hard frictional contacts are particularly troublesome to simulate because they make the differential equations stiff, calling for computationally demanding implicit integration schemes. We suggest to tackle this issue by using exponential integrators, a long-standing class of integration schemes (first introduced in the 60's) that in recent years has enjoyed a resurgence of interest. We show that this scheme can be easily applied to multi-body systems subject to stiff viscoelastic contacts, producing accurate results at lower computational cost than classic explicit schemes. In our tests with quadruped and biped robots, our method demonstrated stable behaviors with large time steps (10 ms) and stiff contacts ($10^5$ N/m). Its excellent properties, especially for fast and coarse simulations, make it a valuable candidate for many applications in robotics, such as simulation, Model Predictive Control, Reinforcement Learning, and controller design.
Impedance Optimization for Uncertain Contact Interactions Through Risk Sensitive Optimal Control
Nov 09, 2020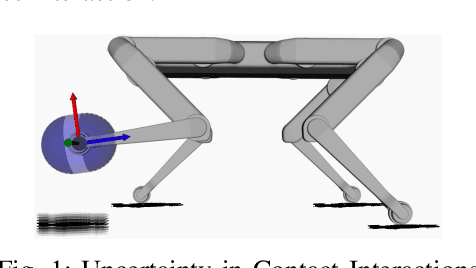

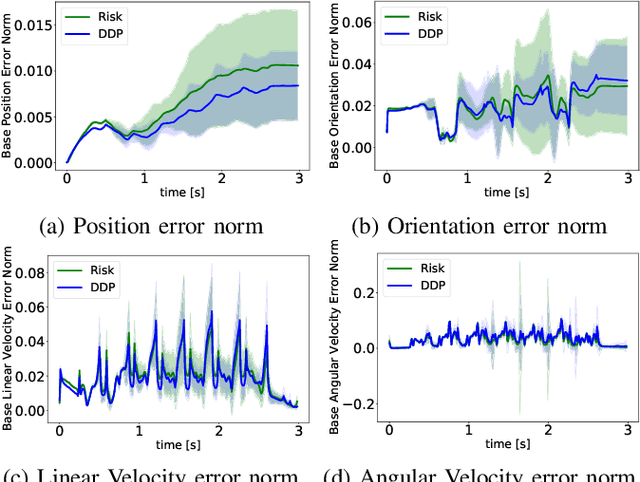
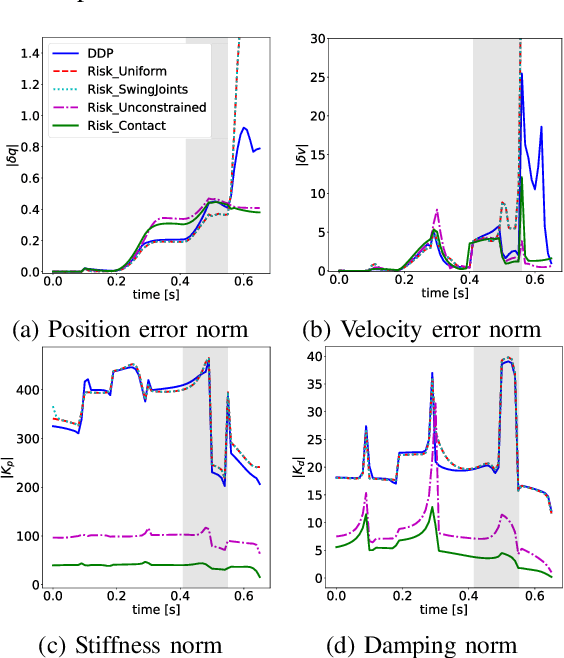
This paper addresses the problem of computing optimal impedance schedules for legged locomotion tasks involving complex contact interactions. We formulate the problem of impedance regulation as a trade-off between disturbance rejection and measurement uncertainty. We extend a stochastic optimal control algorithm known as Risk Sensitive Control to take into account measurement uncertainty and propose a formal way to include such uncertainty for unknown contact locations. The approach can efficiently generate optimal state and control trajectories along with local feedback control gains, i.e. impedance schedules. Extensive simulations demonstrate the capabilities of the approach in generating meaningful stiffness and damping modulation patterns before and after contact interaction. For example, contact forces are reduced during early contacts, damping increases to anticipate a high impact event and tracking is automatically traded-off for increased stability. In particular, we show a significant improvement in performance during jumping and trotting tasks with a simulated quadruped robot.
Leveraging Forward Model Prediction Error for Learning Control
Nov 07, 2020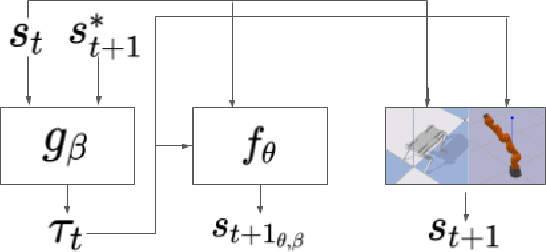
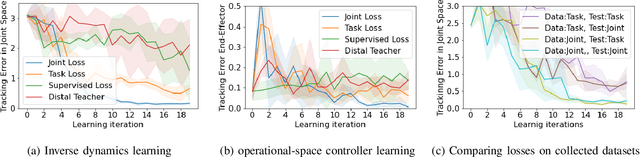
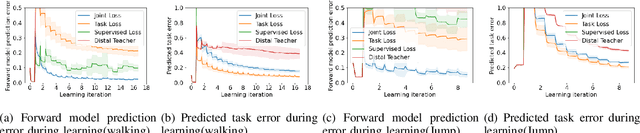
Learning for model based control can be sample-efficient and generalize well, however successfully learning models and controllers that represent the problem at hand can be challenging for complex tasks. Using inaccurate models for learning can lead to sub-optimal solutions, that are unlikely to perform well in practice. In this work, we present a learning approach which iterates between model learning and data collection and leverages forward model prediction error for learning control. We show how using the controller's prediction as input to a forward model can create a differentiable connection between the controller and the model, allowing us to formulate a loss in the state space. This lets us include forward model prediction error during controller learning and we show that this creates a loss objective that significantly improves learning on different motor control tasks. We provide empirical and theoretical results that show the benefits of our method and present evaluations in simulation for learning control on a 7 DoF manipulator and an underactuated 12 DoF quadruped. We show that our approach successfully learns controllers for challenging motor control tasks involving contact switching.
TriFinger: An Open-Source Robot for Learning Dexterity
Aug 08, 2020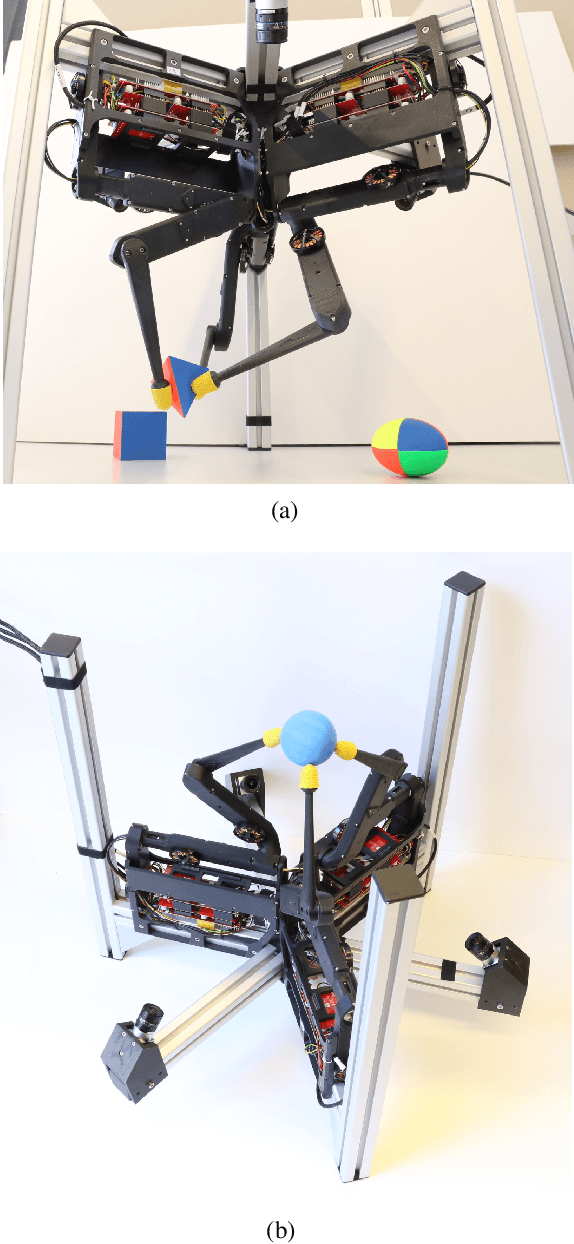
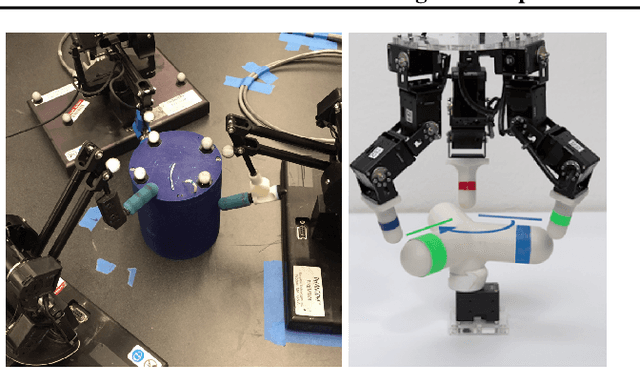
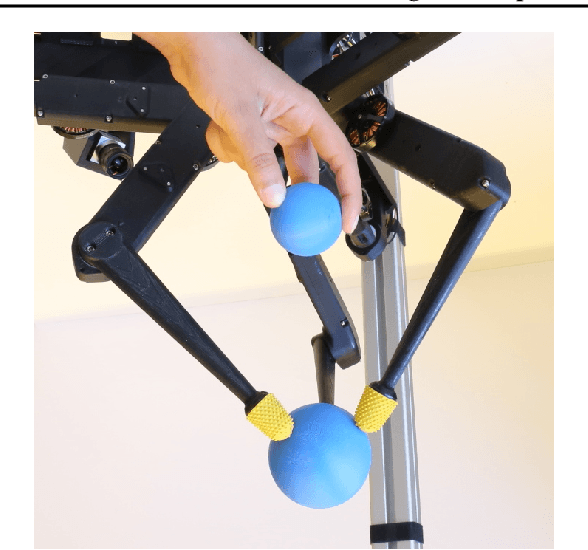
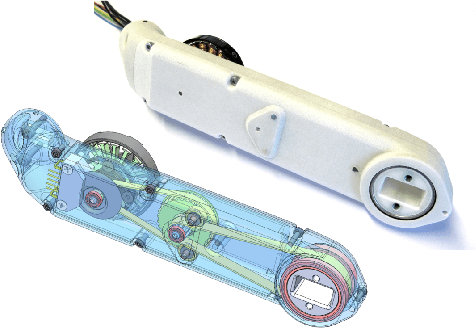
Dexterous object manipulation remains an open problem in robotics, despite the rapid progress in machine learning during the past decade. We argue that a hindrance is the high cost of experimentation on real systems, in terms of both time and money. We address this problem by proposing an open-source robotic platform which can safely operate without human supervision. The hardware is inexpensive (about \SI{5000}[\$]{}) yet highly dynamic, robust, and capable of complex interaction with external objects. The software operates at 1-kilohertz and performs safety checks to prevent the hardware from breaking. The easy-to-use front-end (in C++ and Python) is suitable for real-time control as well as deep reinforcement learning. In addition, the software framework is largely robot-agnostic and can hence be used independently of the hardware proposed herein. Finally, we illustrate the potential of the proposed platform through a number of experiments, including real-time optimal control, deep reinforcement learning from scratch, throwing, and writing.
Crocoddyl: An Efficient and Versatile Framework for Multi-Contact Optimal Control
Sep 11, 2019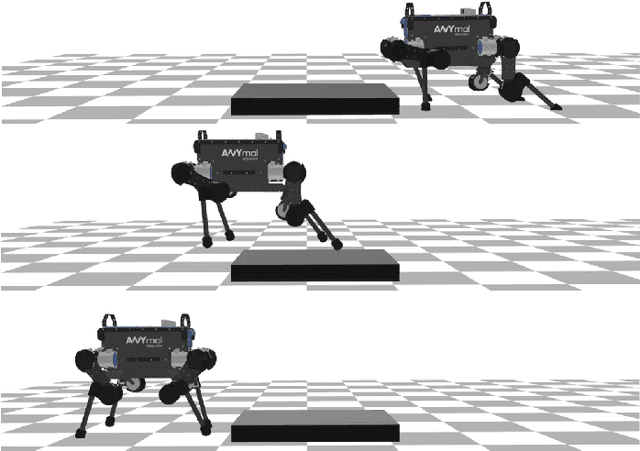
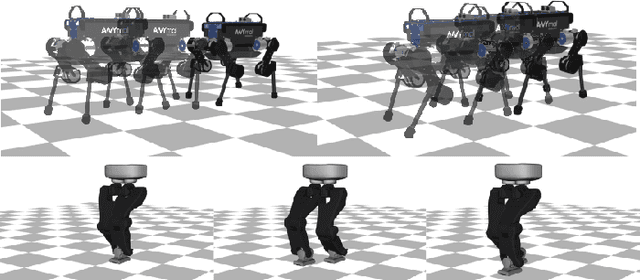
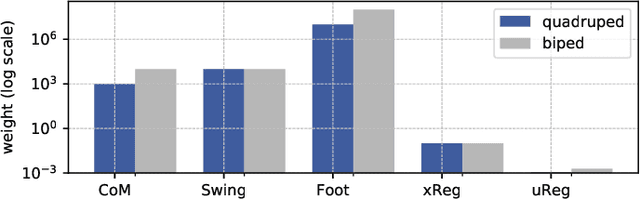
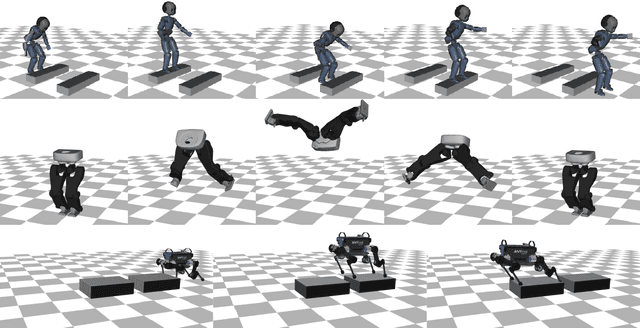
We introduce Crocoddyl (Contact RObot COntrol by Differential DYnamic Library), an open-source framework tailored for efficient multi-contact optimal control. Crocoddyl efficiently computes the state trajectory and the control policy for a given predefined sequence of contacts. Its efficiency is due to the use of sparse analytical derivatives, exploitation of the problem structure, and data sharing. It employs differential geometry to properly describe the state of any geometrical system, e.g. floating-base systems. We have unified dynamics, costs, and constraints into a single concept -- action -- for greater efficiency and easy prototyping. Additionally, we propose a novel multiple-shooting method called Feasibility-prone Differential Dynamic Programming (FDDP). Our novel method shows a greater globalization strategy compared to classical Differential Dynamic Programming (DDP) algorithms, and it has similar numerical behavior to state-of-the-art multiple-shooting methods. However, our method does not increase the computational complexity typically encountered by adding extra variables to describe the gaps in the dynamics. Concretely, we propose two modifications to the classical DDP algorithm. First, the backward pass accepts infeasible state-control trajectories. Second, the rollout keeps the gaps open during the early "exploratory" iterations (as expected in multiple-shooting methods). We showcase the performance of our framework using different tasks. With our method, we can compute highly-dynamic maneuvers for legged robots (e.g. jumping, front-flip) in the order of milliseconds.