 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeWhat's in your hands? 3D Reconstruction of Generic Objects in Hands
Apr 14, 2022
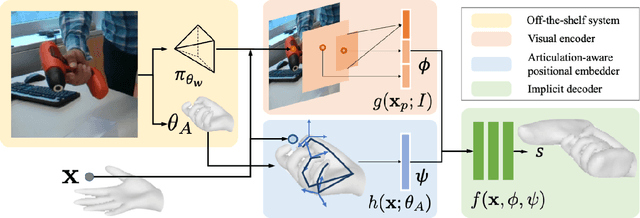
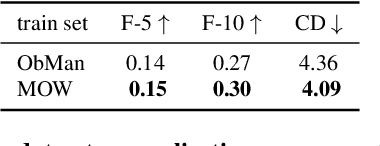
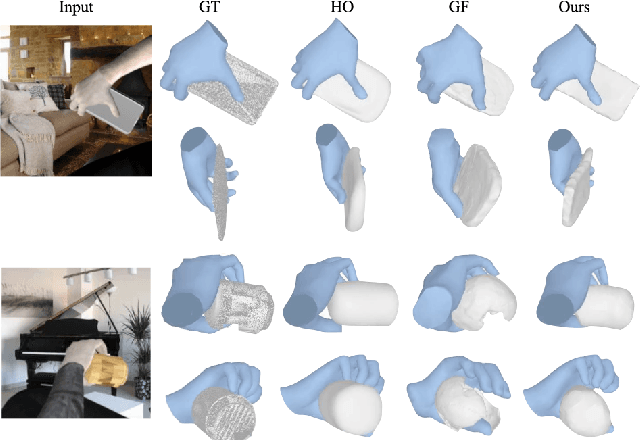
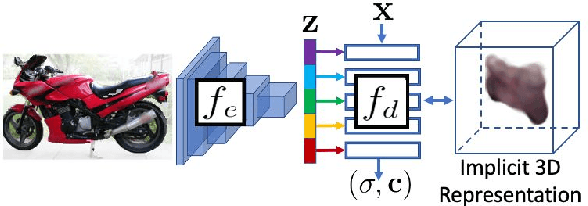
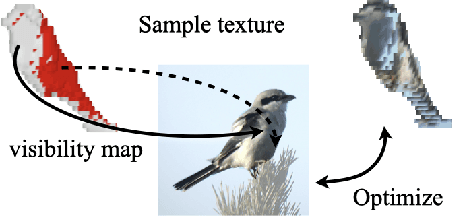
Our work aims to reconstruct hand-held objects given a single RGB image. In contrast to prior works that typically assume known 3D templates and reduce the problem to 3D pose estimation, our work reconstructs generic hand-held object without knowing their 3D templates. Our key insight is that hand articulation is highly predictive of the object shape, and we propose an approach that conditionally reconstructs the object based on the articulation and the visual input. Given an image depicting a hand-held object, we first use off-the-shelf systems to estimate the underlying hand pose and then infer the object shape in a normalized hand-centric coordinate frame. We parameterized the object by signed distance which are inferred by an implicit network which leverages the information from both visual feature and articulation-aware coordinates to process a query point. We perform experiments across three datasets and show that our method consistently outperforms baselines and is able to reconstruct a diverse set of objects. We analyze the benefits and robustness of explicit articulation conditioning and also show that this allows the hand pose estimation to further improve in test-time optimization.
Pre-train, Self-train, Distill: A simple recipe for Supersizing 3D Reconstruction
Apr 07, 2022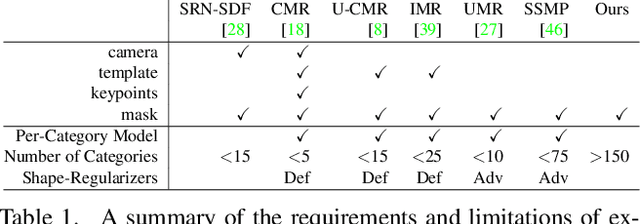

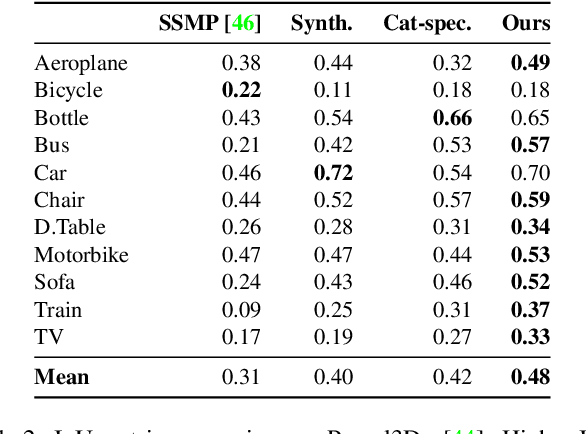
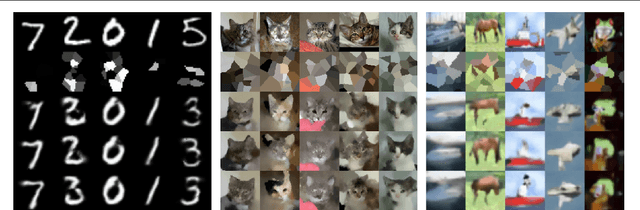
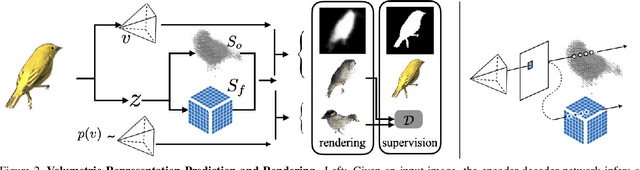
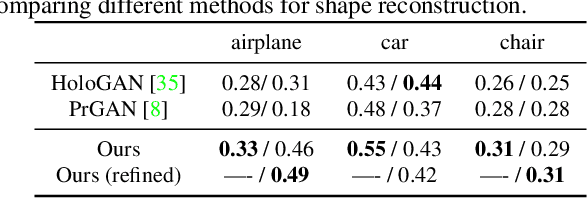
Our work learns a unified model for single-view 3D reconstruction of objects from hundreds of semantic categories. As a scalable alternative to direct 3D supervision, our work relies on segmented image collections for learning 3D of generic categories. Unlike prior works that use similar supervision but learn independent category-specific models from scratch, our approach of learning a unified model simplifies the training process while also allowing the model to benefit from the common structure across categories. Using image collections from standard recognition datasets, we show that our approach allows learning 3D inference for over 150 object categories. We evaluate using two datasets and qualitatively and quantitatively show that our unified reconstruction approach improves over prior category-specific reconstruction baselines. Our final 3D reconstruction model is also capable of zero-shot inference on images from unseen object categories and we empirically show that increasing the number of training categories improves the reconstruction quality.
AutoSDF: Shape Priors for 3D Completion, Reconstruction and Generation
Mar 17, 2022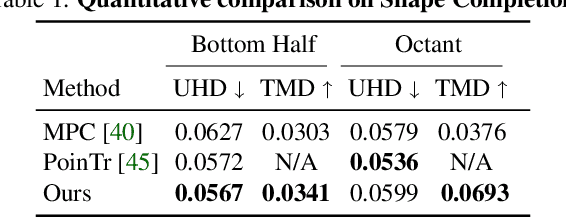
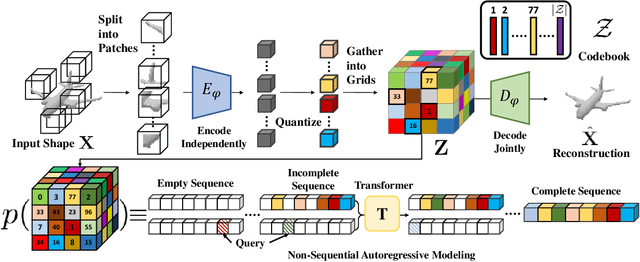
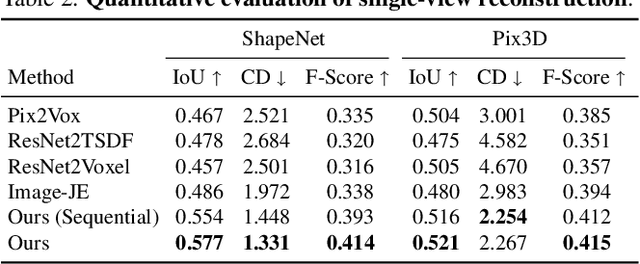
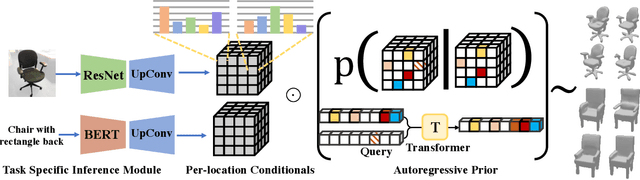
Powerful priors allow us to perform inference with insufficient information. In this paper, we propose an autoregressive prior for 3D shapes to solve multimodal 3D tasks such as shape completion, reconstruction, and generation. We model the distribution over 3D shapes as a non-sequential autoregressive distribution over a discretized, low-dimensional, symbolic grid-like latent representation of 3D shapes. This enables us to represent distributions over 3D shapes conditioned on information from an arbitrary set of spatially anchored query locations and thus perform shape completion in such arbitrary settings (e.g., generating a complete chair given only a view of the back leg). We also show that the learned autoregressive prior can be leveraged for conditional tasks such as single-view reconstruction and language-based generation. This is achieved by learning task-specific naive conditionals which can be approximated by light-weight models trained on minimal paired data. We validate the effectiveness of the proposed method using both quantitative and qualitative evaluation and show that the proposed method outperforms the specialized state-of-the-art methods trained for individual tasks. The project page with code and video visualizations can be found at https://yccyenchicheng.github.io/AutoSDF/.
A Differentiable Recipe for Learning Visual Non-Prehensile Planar Manipulation
Nov 09, 2021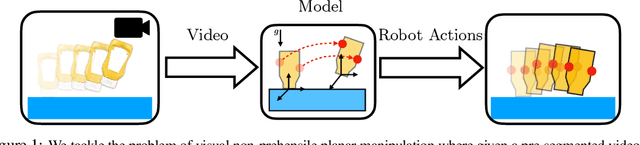
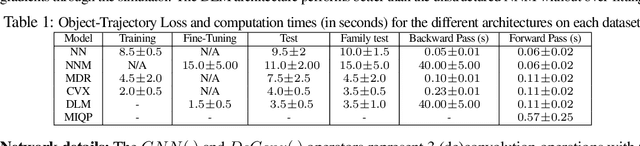
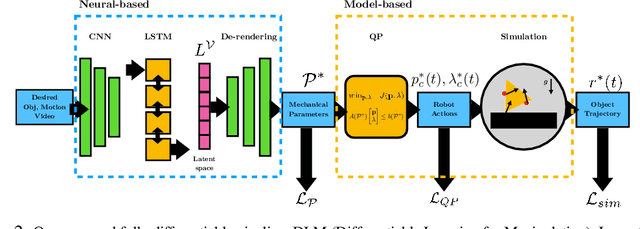
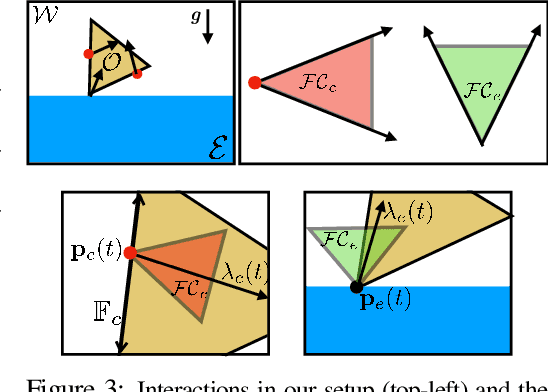
Specifying tasks with videos is a powerful technique towards acquiring novel and general robot skills. However, reasoning over mechanics and dexterous interactions can make it challenging to scale learning contact-rich manipulation. In this work, we focus on the problem of visual non-prehensile planar manipulation: given a video of an object in planar motion, find contact-aware robot actions that reproduce the same object motion. We propose a novel architecture, Differentiable Learning for Manipulation (\ours), that combines video decoding neural models with priors from contact mechanics by leveraging differentiable optimization and finite difference based simulation. Through extensive simulated experiments, we investigate the interplay between traditional model-based techniques and modern deep learning approaches. We find that our modular and fully differentiable architecture performs better than learning-only methods on unseen objects and motions. \url{https://github.com/baceituno/dlm}.
No RL, No Simulation: Learning to Navigate without Navigating
Oct 22, 2021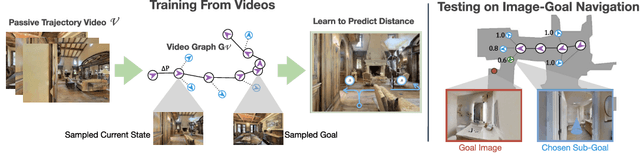
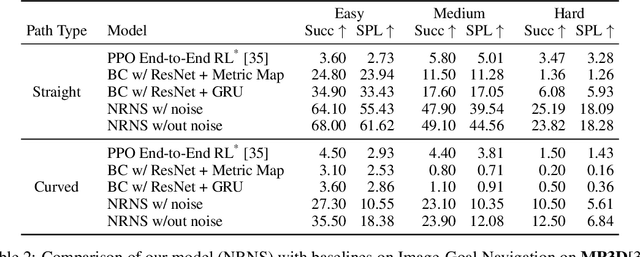
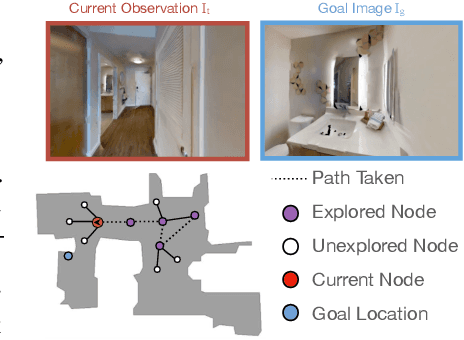
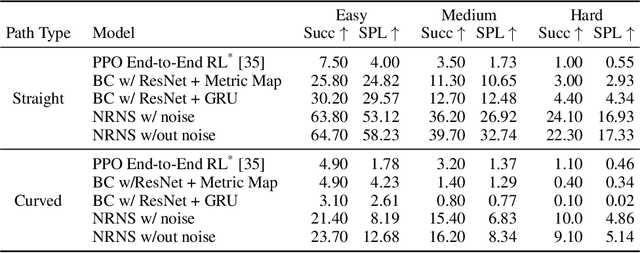
Most prior methods for learning navigation policies require access to simulation environments, as they need online policy interaction and rely on ground-truth maps for rewards. However, building simulators is expensive (requires manual effort for each and every scene) and creates challenges in transferring learned policies to robotic platforms in the real-world, due to the sim-to-real domain gap. In this paper, we pose a simple question: Do we really need active interaction, ground-truth maps or even reinforcement-learning (RL) in order to solve the image-goal navigation task? We propose a self-supervised approach to learn to navigate from only passive videos of roaming. Our approach, No RL, No Simulator (NRNS), is simple and scalable, yet highly effective. NRNS outperforms RL-based formulations by a significant margin. We present NRNS as a strong baseline for any future image-based navigation tasks that use RL or Simulation.
NeRS: Neural Reflectance Surfaces for Sparse-view 3D Reconstruction in the Wild
Oct 18, 2021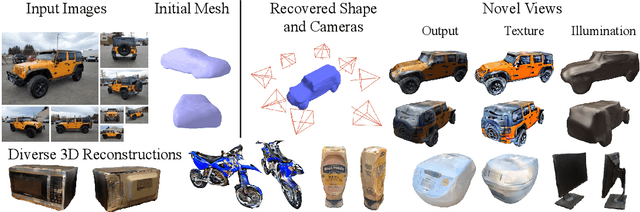
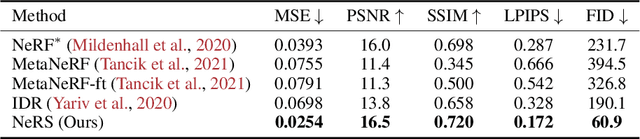

Recent history has seen a tremendous growth of work exploring implicit representations of geometry and radiance, popularized through Neural Radiance Fields (NeRF). Such works are fundamentally based on a (implicit) volumetric representation of occupancy, allowing them to model diverse scene structure including translucent objects and atmospheric obscurants. But because the vast majority of real-world scenes are composed of well-defined surfaces, we introduce a surface analog of such implicit models called Neural Reflectance Surfaces (NeRS). NeRS learns a neural shape representation of a closed surface that is diffeomorphic to a sphere, guaranteeing water-tight reconstructions. Even more importantly, surface parameterizations allow NeRS to learn (neural) bidirectional surface reflectance functions (BRDFs) that factorize view-dependent appearance into environmental illumination, diffuse color (albedo), and specular "shininess." Finally, rather than illustrating our results on synthetic scenes or controlled in-the-lab capture, we assemble a novel dataset of multi-view images from online marketplaces for selling goods. Such "in-the-wild" multi-view image sets pose a number of challenges, including a small number of views with unknown/rough camera estimates. We demonstrate that surface-based neural reconstructions enable learning from such data, outperforming volumetric neural rendering-based reconstructions. We hope that NeRS serves as a first step toward building scalable, high-quality libraries of real-world shape, materials, and illumination. The project page with code and video visualizations can be found at https://jasonyzhang.com/ners.
PixelTransformer: Sample Conditioned Signal Generation
Mar 29, 2021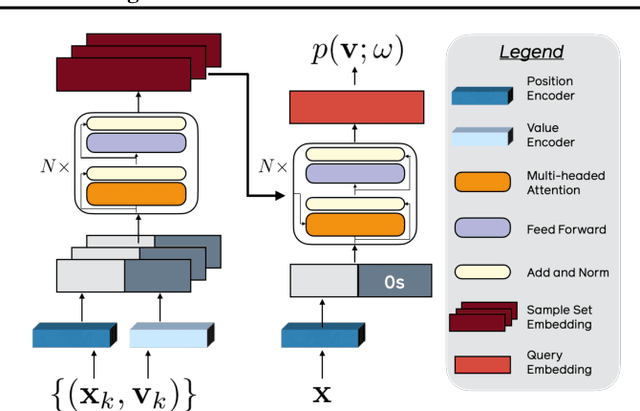
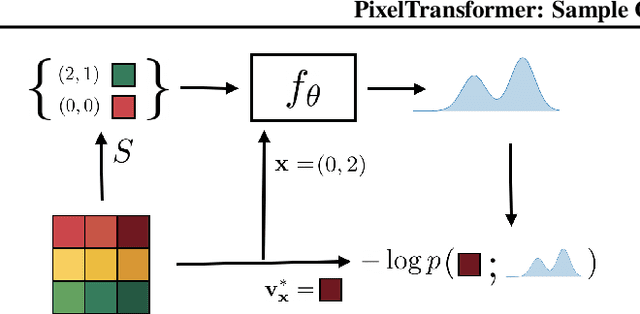
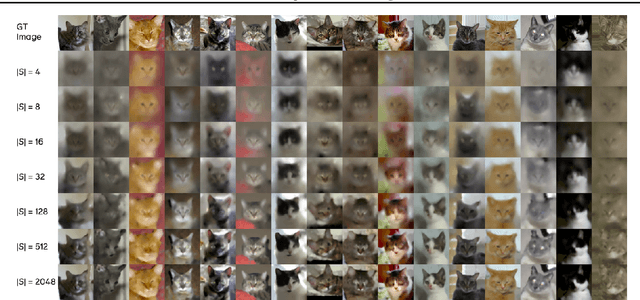
We propose a generative model that can infer a distribution for the underlying spatial signal conditioned on sparse samples e.g. plausible images given a few observed pixels. In contrast to sequential autoregressive generative models, our model allows conditioning on arbitrary samples and can answer distributional queries for any location. We empirically validate our approach across three image datasets and show that we learn to generate diverse and meaningful samples, with the distribution variance reducing given more observed pixels. We also show that our approach is applicable beyond images and can allow generating other types of spatial outputs e.g. polynomials, 3D shapes, and videos.
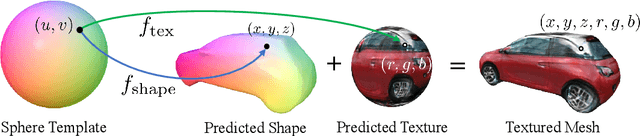
Shelf-Supervised Mesh Prediction in the Wild
Feb 11, 2021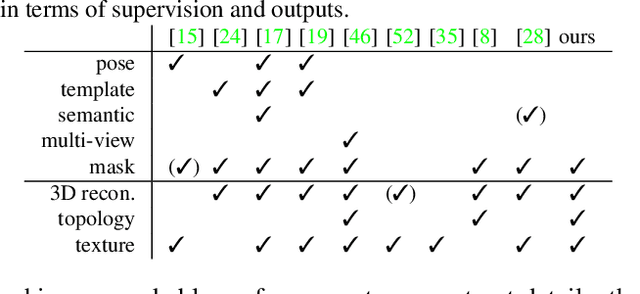
We aim to infer 3D shape and pose of object from a single image and propose a learning-based approach that can train from unstructured image collections, supervised by only segmentation outputs from off-the-shelf recognition systems (i.e. 'shelf-supervised'). We first infer a volumetric representation in a canonical frame, along with the camera pose. We enforce the representation geometrically consistent with both appearance and masks, and also that the synthesized novel views are indistinguishable from image collections. The coarse volumetric prediction is then converted to a mesh-based representation, which is further refined in the predicted camera frame. These two steps allow both shape-pose factorization from image collections and per-instance reconstruction in finer details. We examine the method on both synthetic and real-world datasets and demonstrate its scalability on 50 categories in the wild, an order of magnitude more classes than existing works.
Where2Act: From Pixels to Actions for Articulated 3D Objects
Jan 07, 2021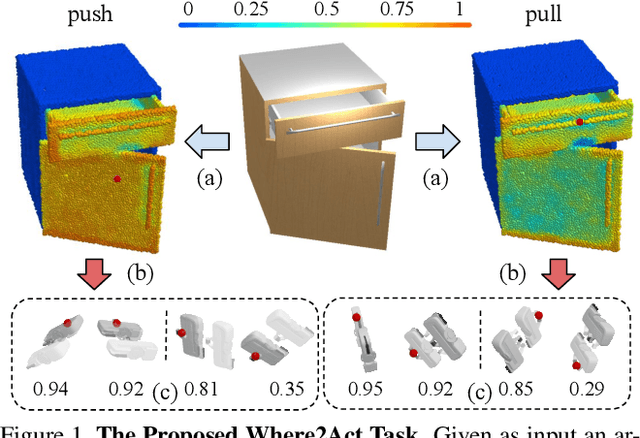
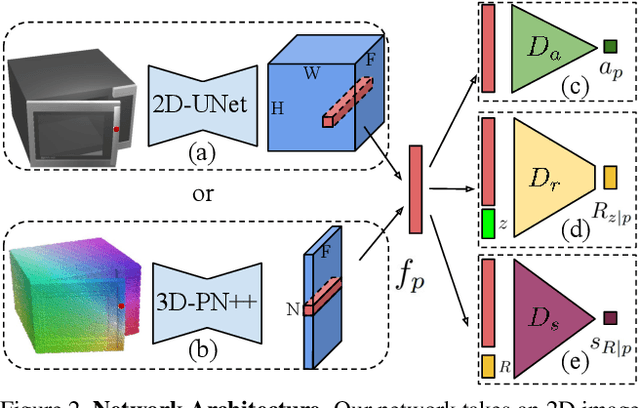
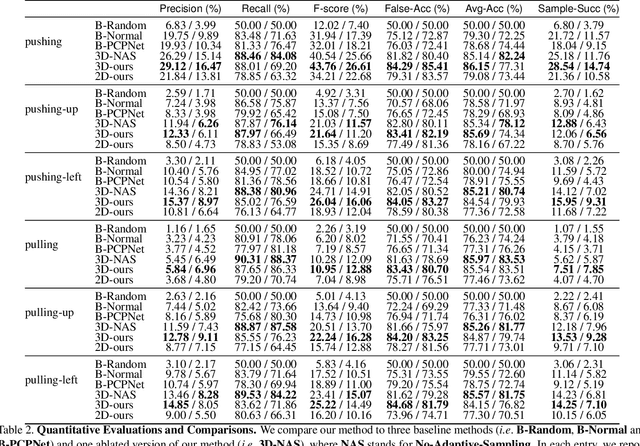
One of the fundamental goals of visual perception is to allow agents to meaningfully interact with their environment. In this paper, we take a step towards that long-term goal -- we extract highly localized actionable information related to elementary actions such as pushing or pulling for articulated objects with movable parts. For example, given a drawer, our network predicts that applying a pulling force on the handle opens the drawer. We propose, discuss, and evaluate novel network architectures that given image and depth data, predict the set of actions possible at each pixel, and the regions over articulated parts that are likely to move under the force. We propose a learning-from-interaction framework with an online data sampling strategy that allows us to train the network in simulation (SAPIEN) and generalizes across categories. But more importantly, our learned models even transfer to real-world data. Check the project website for the code and data release.
Visual Imitation Made Easy
Aug 11, 2020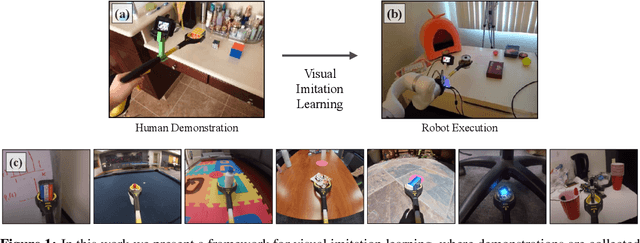

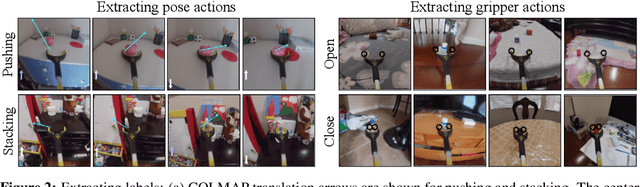
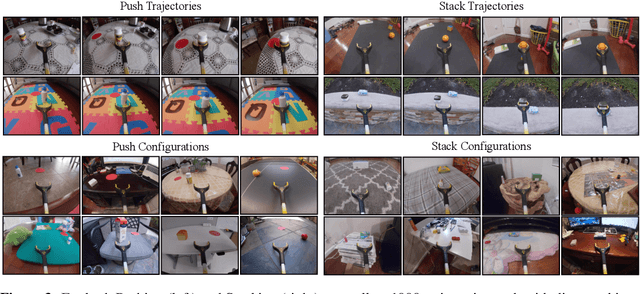
Visual imitation learning provides a framework for learning complex manipulation behaviors by leveraging human demonstrations. However, current interfaces for imitation such as kinesthetic teaching or teleoperation prohibitively restrict our ability to efficiently collect large-scale data in the wild. Obtaining such diverse demonstration data is paramount for the generalization of learned skills to novel scenarios. In this work, we present an alternate interface for imitation that simplifies the data collection process while allowing for easy transfer to robots. We use commercially available reacher-grabber assistive tools both as a data collection device and as the robot's end-effector. To extract action information from these visual demonstrations, we use off-the-shelf Structure from Motion (SfM) techniques in addition to training a finger detection network. We experimentally evaluate on two challenging tasks: non-prehensile pushing and prehensile stacking, with 1000 diverse demonstrations for each task. For both tasks, we use standard behavior cloning to learn executable policies from the previously collected offline demonstrations. To improve learning performance, we employ a variety of data augmentations and provide an extensive analysis of its effects. Finally, we demonstrate the utility of our interface by evaluating on real robotic scenarios with previously unseen objects and achieve a 87% success rate on pushing and a 62% success rate on stacking. Robot videos are available at https://dhiraj100892.github.io/Visual-Imitation-Made-Easy.