 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeConditional Contrastive Learning: Removing Undesirable Information in Self-Supervised Representations
Jun 05, 2021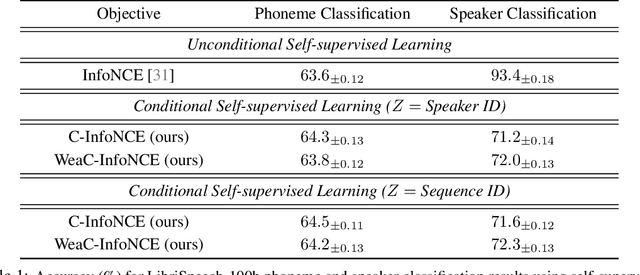
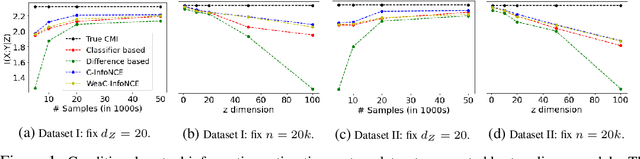
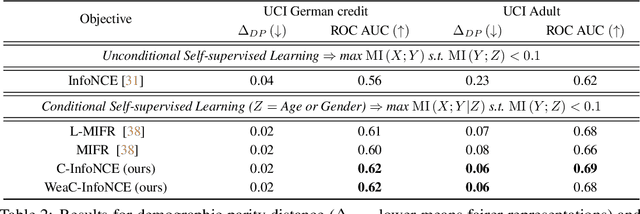
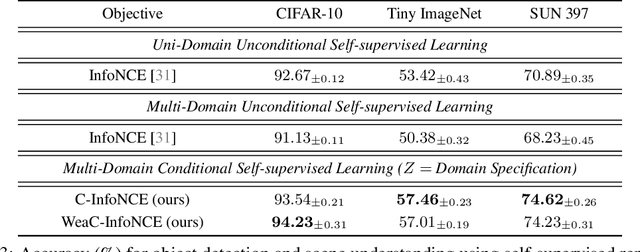
Self-supervised learning is a form of unsupervised learning that leverages rich information in data to learn representations. However, data sometimes contains certain information that may be undesirable for downstream tasks. For instance, gender information may lead to biased decisions on many gender-irrelevant tasks. In this paper, we develop conditional contrastive learning to remove undesirable information in self-supervised representations. To remove the effect of the undesirable variable, our proposed approach conditions on the undesirable variable (i.e., by fixing the variations of it) during the contrastive learning process. In particular, inspired by the contrastive objective InfoNCE, we introduce Conditional InfoNCE (C-InfoNCE), and its computationally efficient variant, Weak-Conditional InfoNCE (WeaC-InfoNCE), for conditional contrastive learning. We demonstrate empirically that our methods can successfully learn self-supervised representations for downstream tasks while removing a great level of information related to the undesirable variables. We study three scenarios, each with a different type of undesirable variables: task-irrelevant meta-information for self-supervised speech representation learning, sensitive attributes for fair representation learning, and domain specification for multi-domain visual representation learning.
End-to-End Multihop Retrieval for Compositional Question Answering over Long Documents
Jun 01, 2021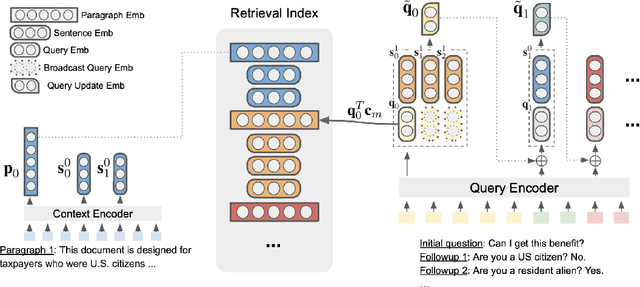
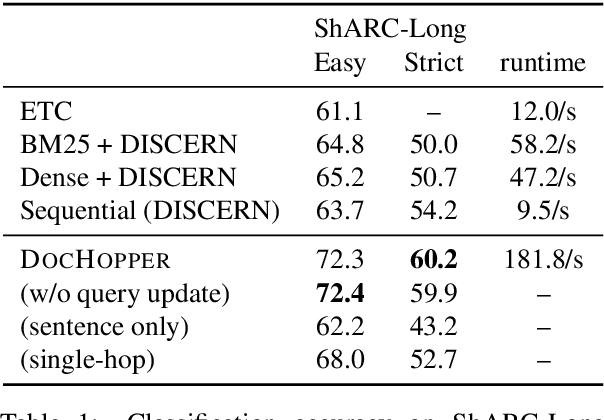
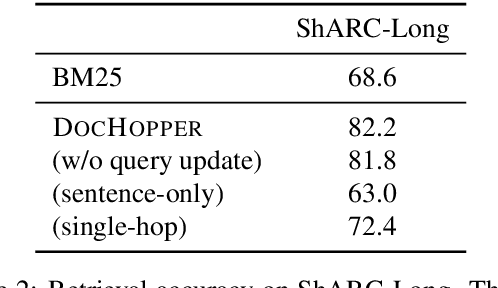
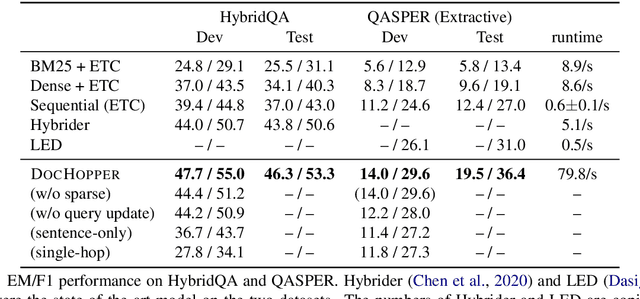
Answering complex questions from long documents requires aggregating multiple pieces of evidence and then predicting the answers. In this paper, we propose a multi-hop retrieval method, DocHopper, to answer compositional questions over long documents. At each step, DocHopper retrieves a paragraph or sentence embedding from the document, mixes the retrieved result with the query, and updates the query for the next step. In contrast to many other retrieval-based methods (e.g., RAG or REALM) the query is not augmented with a token sequence: instead, it is augmented by "numerically" combining it with another neural representation. This means that model is end-to-end differentiable. We demonstrate that utilizing document structure in this was can largely improve question-answering and retrieval performance on long documents. We experimented with DocHopper on three different QA tasks that require reading long documents to answer compositional questions: discourse entailment reasoning, factual QA with table and text, and information seeking QA from academic papers. DocHopper outperforms all baseline models and achieves state-of-the-art results on all datasets. Additionally, DocHopper is efficient at inference time, being 3~10 times faster than the baselines.
Uncertainty Weighted Actor-Critic for Offline Reinforcement Learning
May 17, 2021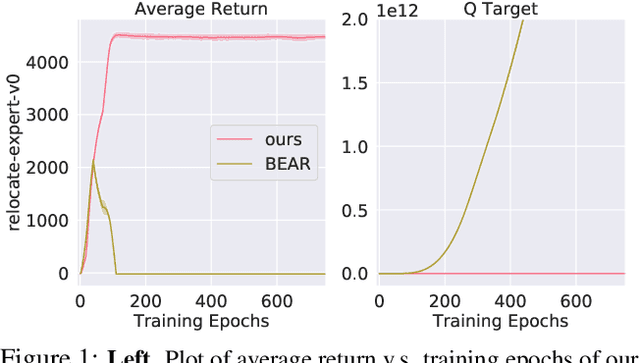
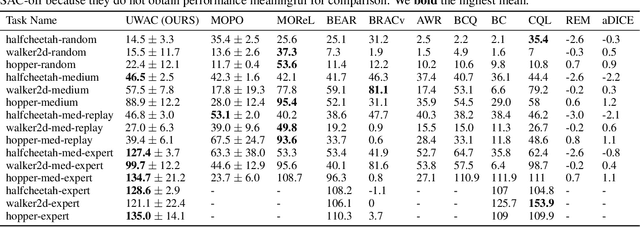

Offline Reinforcement Learning promises to learn effective policies from previously-collected, static datasets without the need for exploration. However, existing Q-learning and actor-critic based off-policy RL algorithms fail when bootstrapping from out-of-distribution (OOD) actions or states. We hypothesize that a key missing ingredient from the existing methods is a proper treatment of uncertainty in the offline setting. We propose Uncertainty Weighted Actor-Critic (UWAC), an algorithm that detects OOD state-action pairs and down-weights their contribution in the training objectives accordingly. Implementation-wise, we adopt a practical and effective dropout-based uncertainty estimation method that introduces very little overhead over existing RL algorithms. Empirically, we observe that UWAC substantially improves model stability during training. In addition, UWAC out-performs existing offline RL methods on a variety of competitive tasks, and achieves significant performance gains over the state-of-the-art baseline on datasets with sparse demonstrations collected from human experts.
A Note on Connecting Barlow Twins with Negative-Sample-Free Contrastive Learning
Apr 28, 2021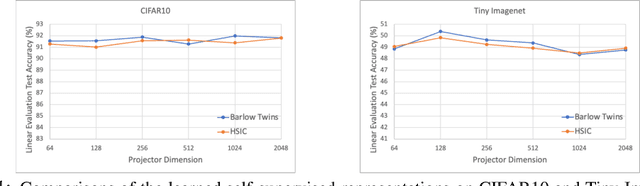
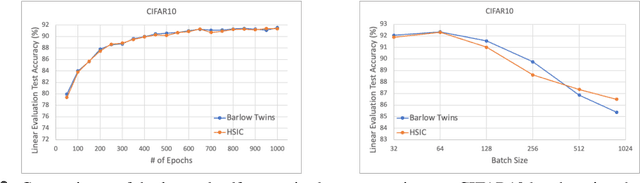
In this report, we relate the algorithmic design of Barlow Twins' method to the Hilbert-Schmidt Independence Criterion (HSIC), thus establishing it as a contrastive learning approach that is free of negative samples. Through this perspective, we argue that Barlow Twins (and thus the class of negative-sample-free contrastive learning methods) suggests a possibility to bridge the two major families of self-supervised learning philosophies: non-contrastive and contrastive approaches. In particular, Barlow twins exemplified how we could combine the best practices of both worlds: avoiding the need of large training batch size and negative sample pairing (like non-contrastive methods) and avoiding symmetry-breaking network designs (like contrastive methods).
Focused Attention Improves Document-Grounded Generation
Apr 26, 2021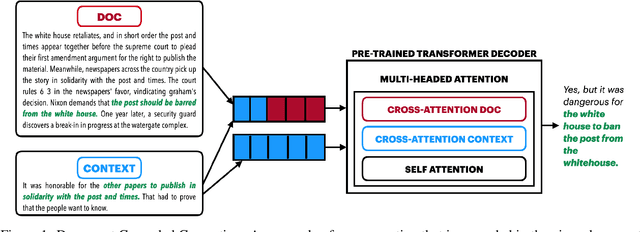
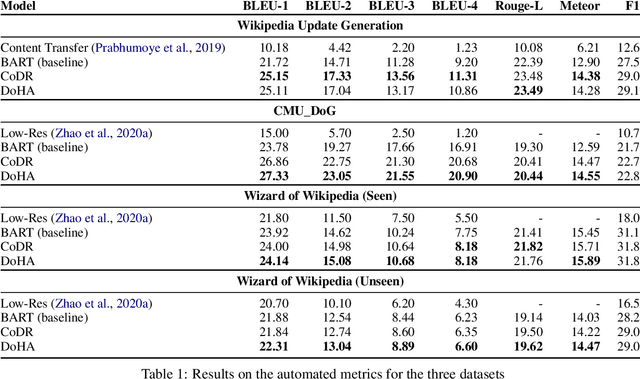
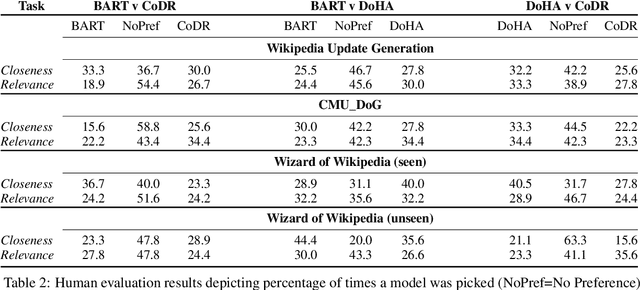
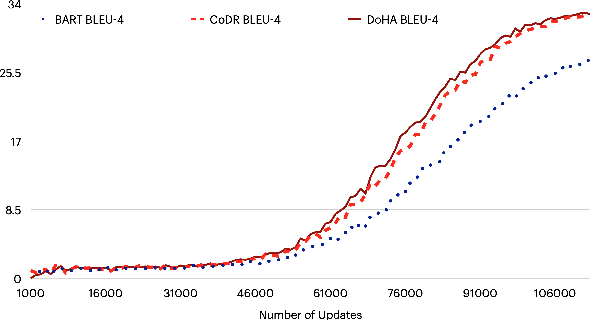
Document grounded generation is the task of using the information provided in a document to improve text generation. This work focuses on two different document grounded generation tasks: Wikipedia Update Generation task and Dialogue response generation. Our work introduces two novel adaptations of large scale pre-trained encoder-decoder models focusing on building context driven representation of the document and enabling specific attention to the information in the document. Additionally, we provide a stronger BART baseline for these tasks. Our proposed techniques outperform existing methods on both automated (at least 48% increase in BLEU-4 points) and human evaluation for closeness to reference and relevance to the document. Furthermore, we perform comprehensive manual inspection of the generated output and categorize errors to provide insights into future directions in modeling these tasks.
Self-supervised Representation Learning with Relative Predictive Coding
Apr 12, 2021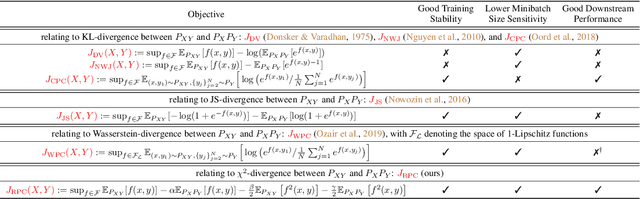
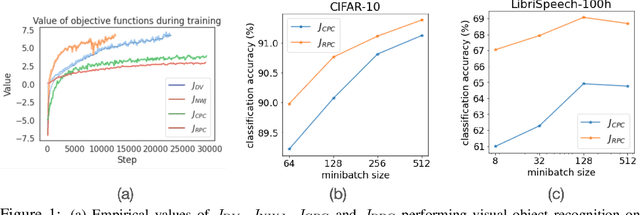
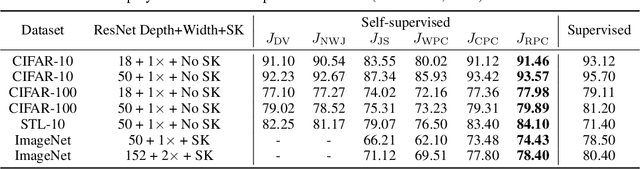
This paper introduces Relative Predictive Coding (RPC), a new contrastive representation learning objective that maintains a good balance among training stability, minibatch size sensitivity, and downstream task performance. The key to the success of RPC is two-fold. First, RPC introduces the relative parameters to regularize the objective for boundedness and low variance. Second, RPC contains no logarithm and exponential score functions, which are the main cause of training instability in prior contrastive objectives. We empirically verify the effectiveness of RPC on benchmark vision and speech self-supervised learning tasks. Lastly, we relate RPC with mutual information (MI) estimation, showing RPC can be used to estimate MI with low variance.
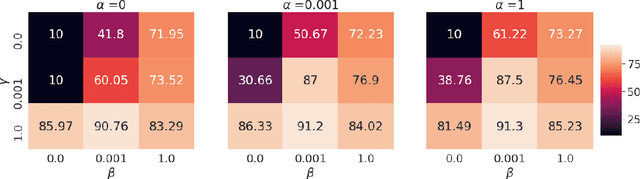
StylePTB: A Compositional Benchmark for Fine-grained Controllable Text Style Transfer
Apr 12, 2021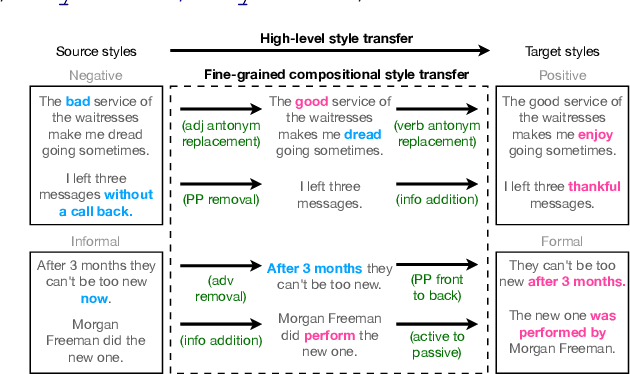
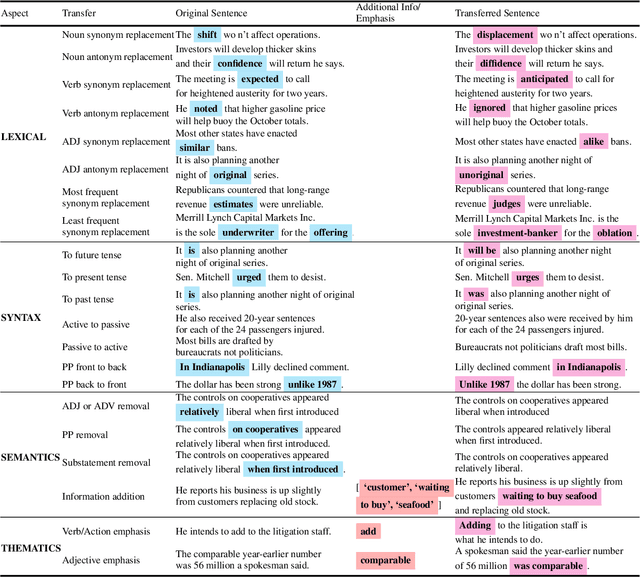
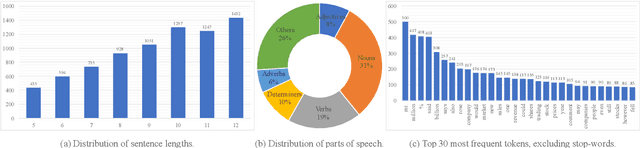
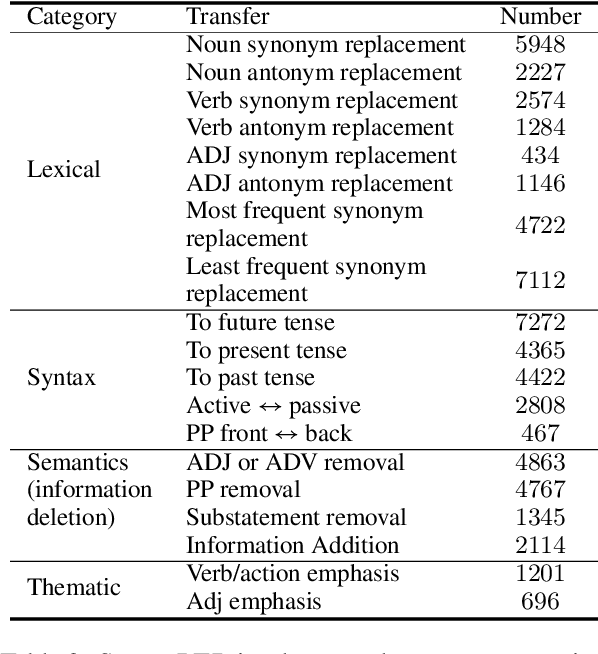
Text style transfer aims to controllably generate text with targeted stylistic changes while maintaining core meaning from the source sentence constant. Many of the existing style transfer benchmarks primarily focus on individual high-level semantic changes (e.g. positive to negative), which enable controllability at a high level but do not offer fine-grained control involving sentence structure, emphasis, and content of the sentence. In this paper, we introduce a large-scale benchmark, StylePTB, with (1) paired sentences undergoing 21 fine-grained stylistic changes spanning atomic lexical, syntactic, semantic, and thematic transfers of text, as well as (2) compositions of multiple transfers which allow modeling of fine-grained stylistic changes as building blocks for more complex, high-level transfers. By benchmarking existing methods on StylePTB, we find that they struggle to model fine-grained changes and have an even more difficult time composing multiple styles. As a result, StylePTB brings novel challenges that we hope will encourage future research in controllable text style transfer, compositional models, and learning disentangled representations. Solving these challenges would present important steps towards controllable text generation.
Efficient Transformers in Reinforcement Learning using Actor-Learner Distillation
Apr 04, 2021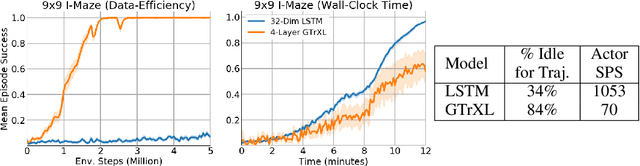
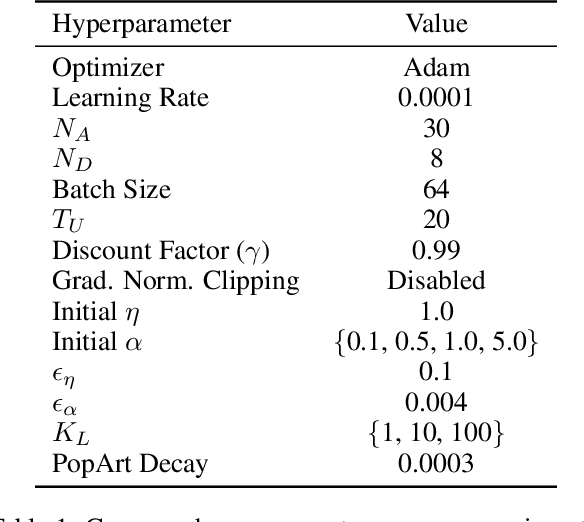
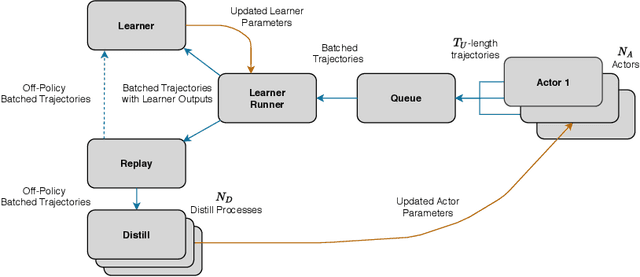
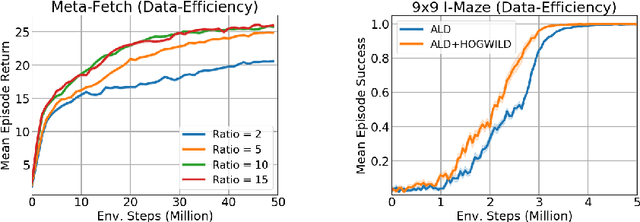
Many real-world applications such as robotics provide hard constraints on power and compute that limit the viable model complexity of Reinforcement Learning (RL) agents. Similarly, in many distributed RL settings, acting is done on un-accelerated hardware such as CPUs, which likewise restricts model size to prevent intractable experiment run times. These "actor-latency" constrained settings present a major obstruction to the scaling up of model complexity that has recently been extremely successful in supervised learning. To be able to utilize large model capacity while still operating within the limits imposed by the system during acting, we develop an "Actor-Learner Distillation" (ALD) procedure that leverages a continual form of distillation that transfers learning progress from a large capacity learner model to a small capacity actor model. As a case study, we develop this procedure in the context of partially-observable environments, where transformer models have had large improvements over LSTMs recently, at the cost of significantly higher computational complexity. With transformer models as the learner and LSTMs as the actor, we demonstrate in several challenging memory environments that using Actor-Learner Distillation recovers the clear sample-efficiency gains of the transformer learner model while maintaining the fast inference and reduced total training time of the LSTM actor model.
Replacing Rewards with Examples: Example-Based Policy Search via Recursive Classification
Mar 23, 2021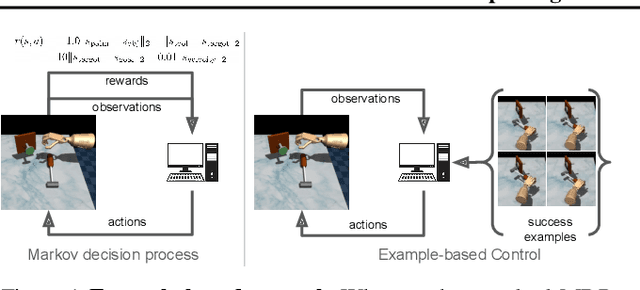

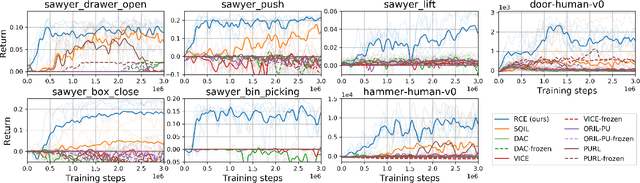

In the standard Markov decision process formalism, users specify tasks by writing down a reward function. However, in many scenarios, the user is unable to describe the task in words or numbers, but can readily provide examples of what the world would look like if the task were solved. Motivated by this observation, we derive a control algorithm from first principles that aims to visit states that have a high probability of leading to successful outcomes, given only examples of successful outcome states. Prior work has approached similar problem settings in a two-stage process, first learning an auxiliary reward function and then optimizing this reward function using another reinforcement learning algorithm. In contrast, we derive a method based on recursive classification that eschews auxiliary reward functions and instead directly learns a value function from transitions and successful outcomes. Our method therefore requires fewer hyperparameters to tune and lines of code to debug. We show that our method satisfies a new data-driven Bellman equation, where examples take the place of the typical reward function term. Experiments show that our approach outperforms prior methods that learn explicit reward functions.
Instabilities of Offline RL with Pre-Trained Neural Representation
Mar 08, 2021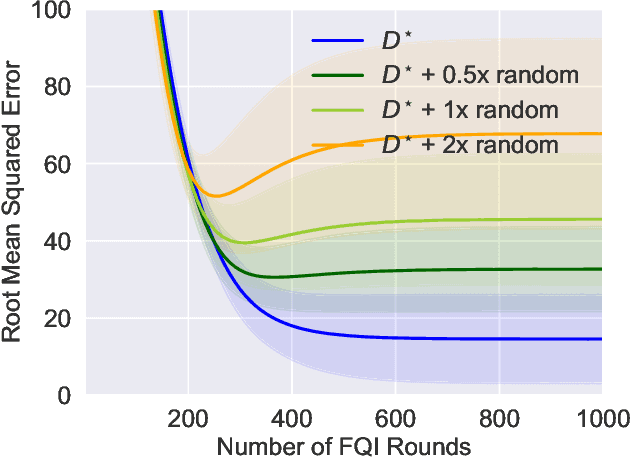

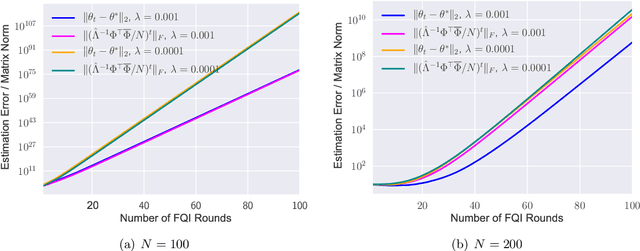
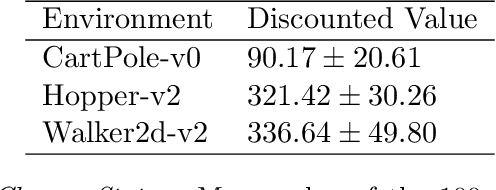
In offline reinforcement learning (RL), we seek to utilize offline data to evaluate (or learn) policies in scenarios where the data are collected from a distribution that substantially differs from that of the target policy to be evaluated. Recent theoretical advances have shown that such sample-efficient offline RL is indeed possible provided certain strong representational conditions hold, else there are lower bounds exhibiting exponential error amplification (in the problem horizon) unless the data collection distribution has only a mild distribution shift relative to the target policy. This work studies these issues from an empirical perspective to gauge how stable offline RL methods are. In particular, our methodology explores these ideas when using features from pre-trained neural networks, in the hope that these representations are powerful enough to permit sample efficient offline RL. Through extensive experiments on a range of tasks, we see that substantial error amplification does occur even when using such pre-trained representations (trained on the same task itself); we find offline RL is stable only under extremely mild distribution shift. The implications of these results, both from a theoretical and an empirical perspective, are that successful offline RL (where we seek to go beyond the low distribution shift regime) requires substantially stronger conditions beyond those which suffice for successful supervised learning.