 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeDeepFusion: Lidar-Camera Deep Fusion for Multi-Modal 3D Object Detection
Mar 15, 2022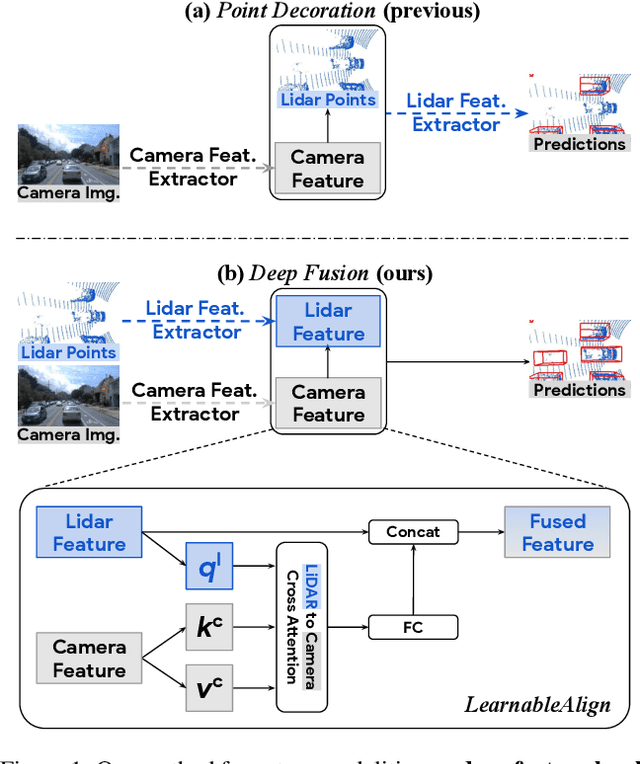
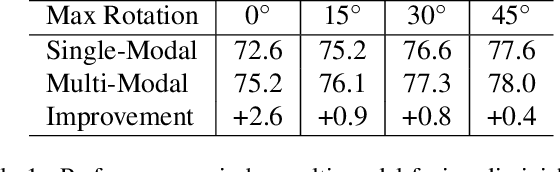
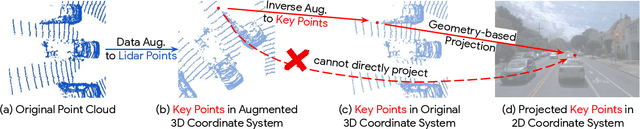
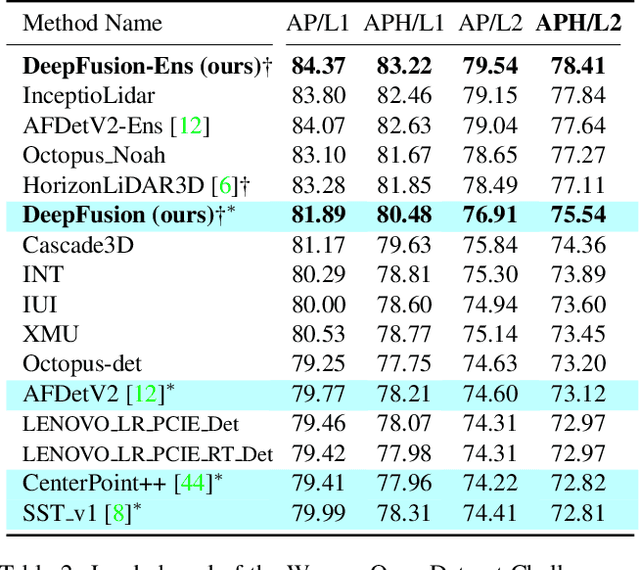
Lidars and cameras are critical sensors that provide complementary information for 3D detection in autonomous driving. While prevalent multi-modal methods simply decorate raw lidar point clouds with camera features and feed them directly to existing 3D detection models, our study shows that fusing camera features with deep lidar features instead of raw points, can lead to better performance. However, as those features are often augmented and aggregated, a key challenge in fusion is how to effectively align the transformed features from two modalities. In this paper, we propose two novel techniques: InverseAug that inverses geometric-related augmentations, e.g., rotation, to enable accurate geometric alignment between lidar points and image pixels, and LearnableAlign that leverages cross-attention to dynamically capture the correlations between image and lidar features during fusion. Based on InverseAug and LearnableAlign, we develop a family of generic multi-modal 3D detection models named DeepFusion, which is more accurate than previous methods. For example, DeepFusion improves PointPillars, CenterPoint, and 3D-MAN baselines on Pedestrian detection for 6.7, 8.9, and 6.2 LEVEL_2 APH, respectively. Notably, our models achieve state-of-the-art performance on Waymo Open Dataset, and show strong model robustness against input corruptions and out-of-distribution data. Code will be publicly available at https://github.com/tensorflow/lingvo/tree/master/lingvo/.
Transformer Quality in Linear Time
Feb 21, 2022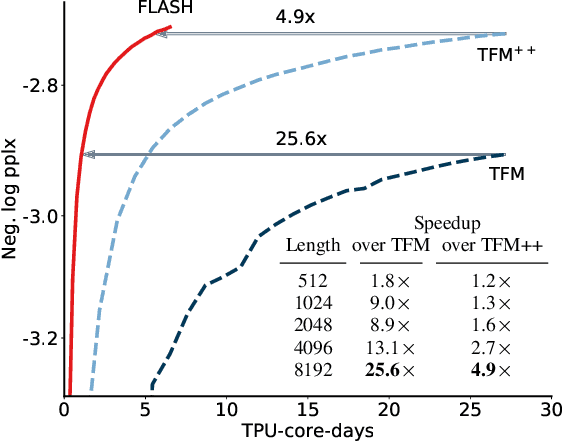
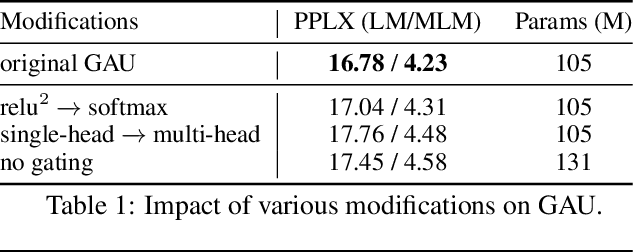
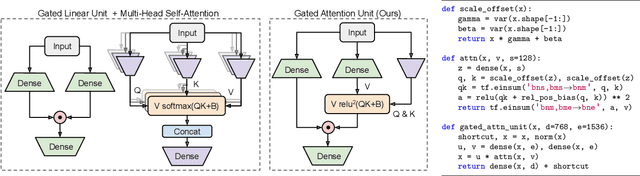
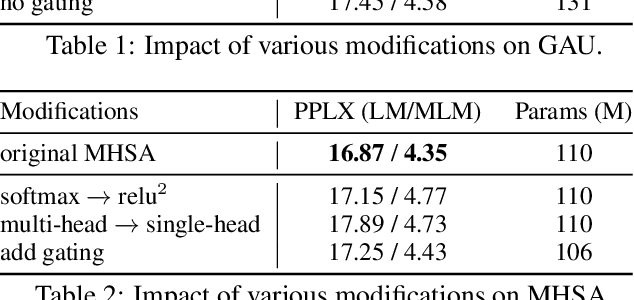
We revisit the design choices in Transformers, and propose methods to address their weaknesses in handling long sequences. First, we propose a simple layer named gated attention unit, which allows the use of a weaker single-head attention with minimal quality loss. We then propose a linear approximation method complementary to this new layer, which is accelerator-friendly and highly competitive in quality. The resulting model, named FLASH, matches the perplexity of improved Transformers over both short (512) and long (8K) context lengths, achieving training speedups of up to 4.9$\times$ on Wiki-40B and 12.1$\times$ on PG-19 for auto-regressive language modeling, and 4.8$\times$ on C4 for masked language modeling.
Combined Scaling for Zero-shot Transfer Learning
Nov 19, 2021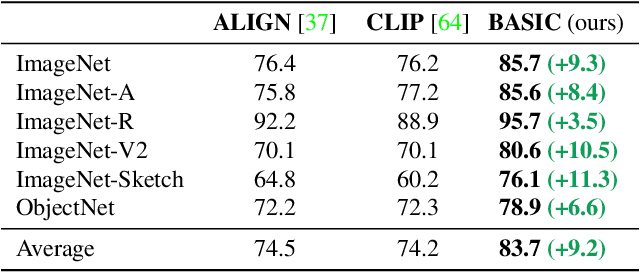
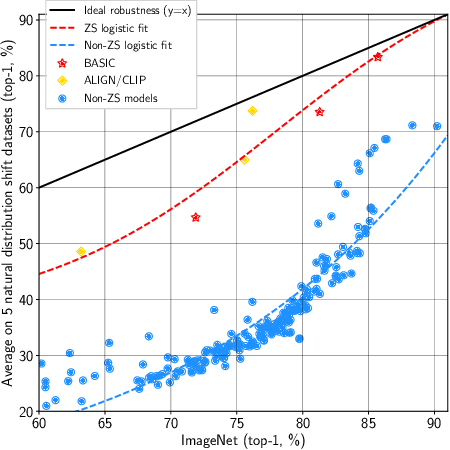

We present a combined scaling method called BASIC that achieves 85.7% top-1 zero-shot accuracy on the ImageNet ILSVRC-2012 validation set, surpassing the best-published zero-shot models - CLIP and ALIGN - by 9.3%. Our BASIC model also shows significant improvements in robustness benchmarks. For instance, on 5 test sets with natural distribution shifts such as ImageNet-{A,R,V2,Sketch} and ObjectNet, our model achieves 83.7% top-1 average accuracy, only a small drop from the its original ImageNet accuracy. To achieve these results, we scale up the contrastive learning framework of CLIP and ALIGN in three dimensions: data size, model size, and batch size. Our dataset has 6.6B noisy image-text pairs, which is 4x larger than ALIGN, and 16x larger than CLIP. Our largest model has 3B weights, which is 3.75x larger in parameters and 8x larger in FLOPs than ALIGN and CLIP. Our batch size is 65536 which is 2x more than CLIP and 4x more than ALIGN. The main challenge with scaling is the limited memory of our accelerators such as GPUs and TPUs. We hence propose a simple method of online gradient caching to overcome this limit.
BigSSL: Exploring the Frontier of Large-Scale Semi-Supervised Learning for Automatic Speech Recognition
Oct 01, 2021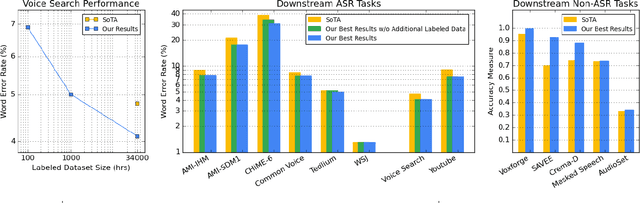
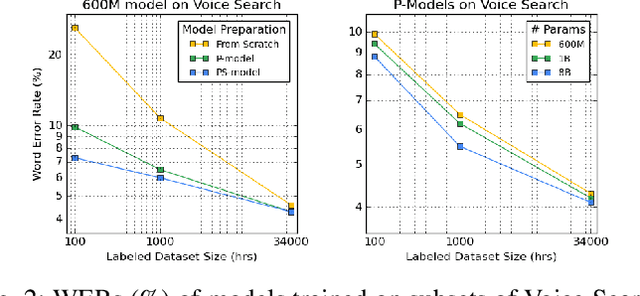
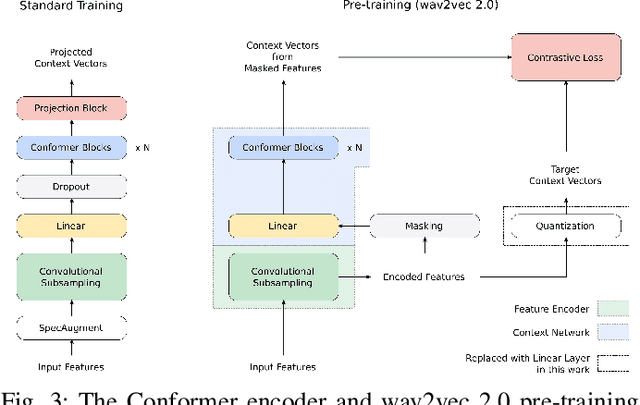
We summarize the results of a host of efforts using giant automatic speech recognition (ASR) models pre-trained using large, diverse unlabeled datasets containing approximately a million hours of audio. We find that the combination of pre-training, self-training and scaling up model size greatly increases data efficiency, even for extremely large tasks with tens of thousands of hours of labeled data. In particular, on an ASR task with 34k hours of labeled data, by fine-tuning an 8 billion parameter pre-trained Conformer model we can match state-of-the-art (SoTA) performance with only 3% of the training data and significantly improve SoTA with the full training set. We also report on the universal benefits gained from using big pre-trained and self-trained models for a large set of downstream tasks that cover a wide range of speech domains and span multiple orders of magnitudes of dataset sizes, including obtaining SoTA performance on many public benchmarks. In addition, we utilize the learned representation of pre-trained networks to achieve SoTA results on non-ASR tasks.
Primer: Searching for Efficient Transformers for Language Modeling
Sep 17, 2021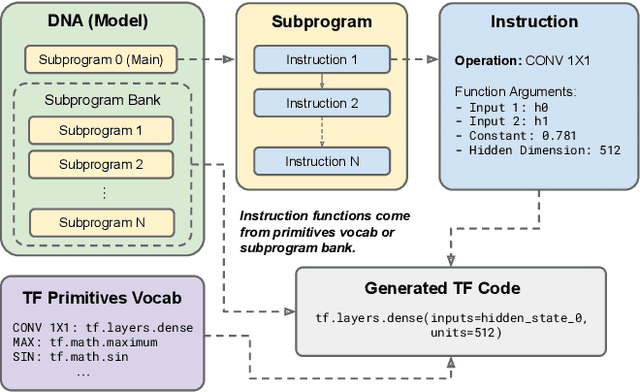
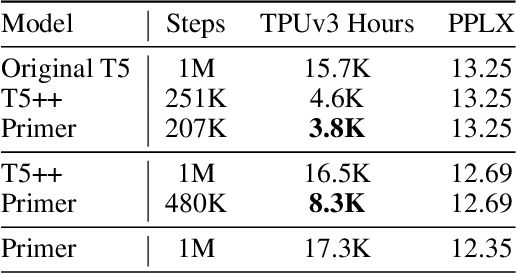
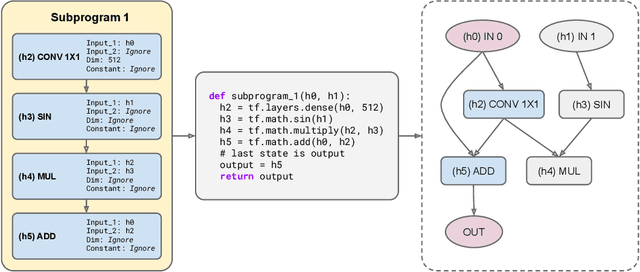
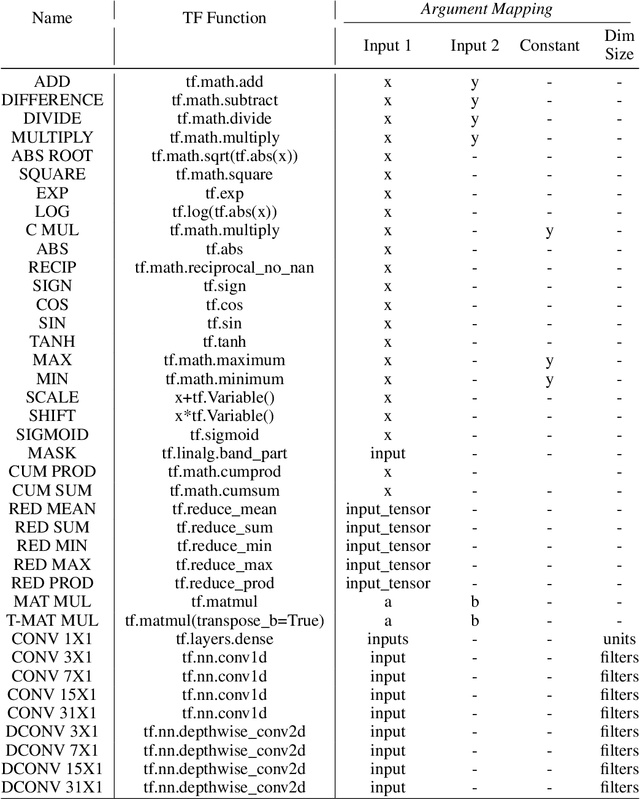
Large Transformer models have been central to recent advances in natural language processing. The training and inference costs of these models, however, have grown rapidly and become prohibitively expensive. Here we aim to reduce the costs of Transformers by searching for a more efficient variant. Compared to previous approaches, our search is performed at a lower level, over the primitives that define a Transformer TensorFlow program. We identify an architecture, named Primer, that has a smaller training cost than the original Transformer and other variants for auto-regressive language modeling. Primer's improvements can be mostly attributed to two simple modifications: squaring ReLU activations and adding a depthwise convolution layer after each Q, K, and V projection in self-attention. Experiments show Primer's gains over Transformer increase as compute scale grows and follow a power law with respect to quality at optimal model sizes. We also verify empirically that Primer can be dropped into different codebases to significantly speed up training without additional tuning. For example, at a 500M parameter size, Primer improves the original T5 architecture on C4 auto-regressive language modeling, reducing the training cost by 4X. Furthermore, the reduced training cost means Primer needs much less compute to reach a target one-shot performance. For instance, in a 1.9B parameter configuration similar to GPT-3 XL, Primer uses 1/3 of the training compute to achieve the same one-shot performance as Transformer. We open source our models and several comparisons in T5 to help with reproducibility.
STraTA: Self-Training with Task Augmentation for Better Few-shot Learning
Sep 13, 2021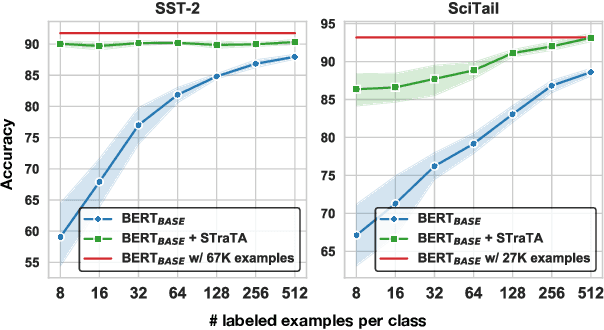
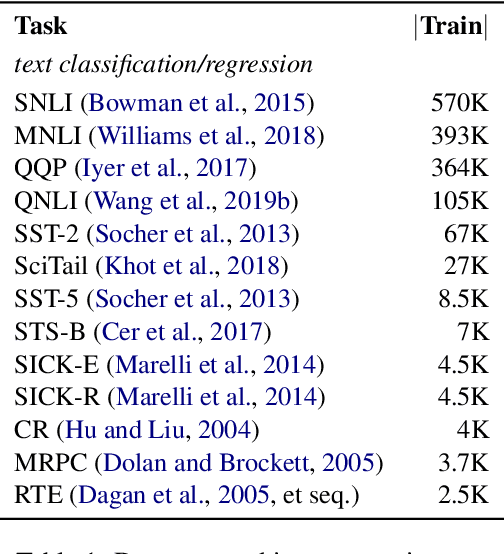
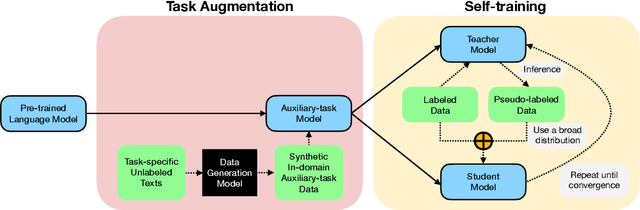
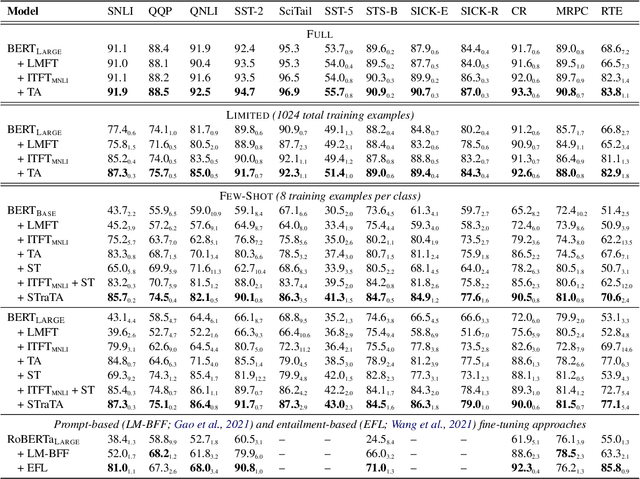
Despite their recent successes in tackling many NLP tasks, large-scale pre-trained language models do not perform as well in few-shot settings where only a handful of training examples are available. To address this shortcoming, we propose STraTA, which stands for Self-Training with Task Augmentation, an approach that builds on two key ideas for effective leverage of unlabeled data. First, STraTA uses task augmentation, a novel technique that synthesizes a large amount of data for auxiliary-task fine-tuning from target-task unlabeled texts. Second, STraTA performs self-training by further fine-tuning the strong base model created by task augmentation on a broad distribution of pseudo-labeled data. Our experiments demonstrate that STraTA can substantially improve sample efficiency across 12 few-shot benchmarks. Remarkably, on the SST-2 sentiment dataset, STraTA, with only 8 training examples per class, achieves comparable results to standard fine-tuning with 67K training examples. Our analyses reveal that task augmentation and self-training are both complementary and independently effective.
Finetuned Language Models Are Zero-Shot Learners
Sep 03, 2021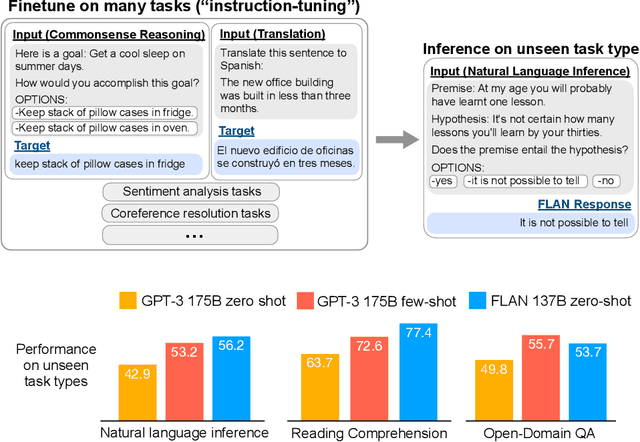
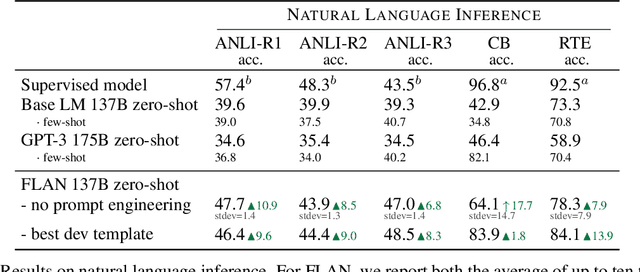
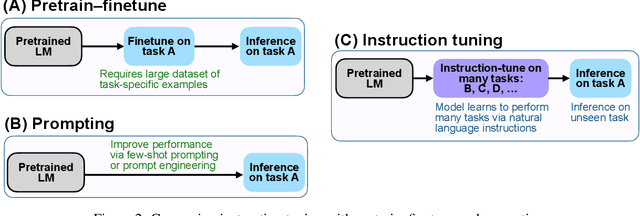
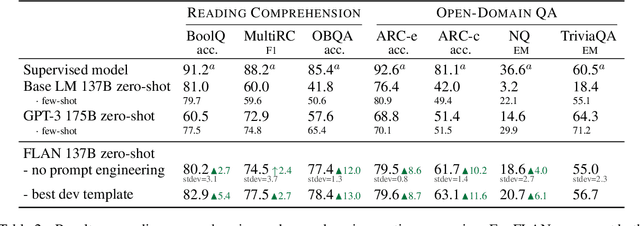
This paper explores a simple method for improving the zero-shot learning abilities of language models. We show that instruction tuning -- finetuning language models on a collection of tasks described via instructions -- substantially boosts zero-shot performance on unseen tasks. We take a 137B parameter pretrained language model and instruction-tune it on over 60 NLP tasks verbalized via natural language instruction templates. We evaluate this instruction-tuned model, which we call FLAN, on unseen task types. FLAN substantially improves the performance of its unmodified counterpart and surpasses zero-shot 175B GPT-3 on 19 of 25 tasks that we evaluate. FLAN even outperforms few-shot GPT-3 by a large margin on ANLI, RTE, BoolQ, AI2-ARC, OpenbookQA, and StoryCloze. Ablation studies reveal that number of tasks and model scale are key components to the success of instruction tuning.
Multi-Task Self-Training for Learning General Representations
Aug 25, 2021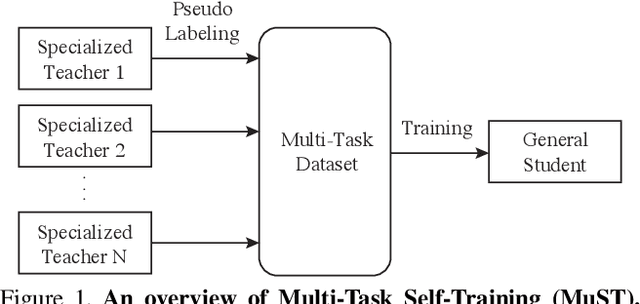
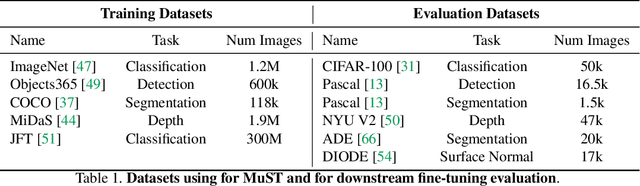
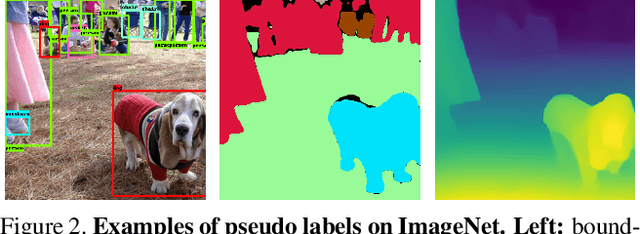
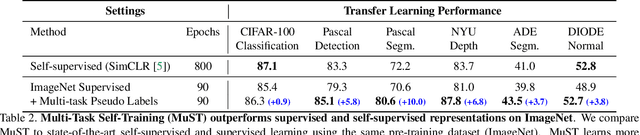
Despite the fast progress in training specialized models for various tasks, learning a single general model that works well for many tasks is still challenging for computer vision. Here we introduce multi-task self-training (MuST), which harnesses the knowledge in independent specialized teacher models (e.g., ImageNet model on classification) to train a single general student model. Our approach has three steps. First, we train specialized teachers independently on labeled datasets. We then use the specialized teachers to label an unlabeled dataset to create a multi-task pseudo labeled dataset. Finally, the dataset, which now contains pseudo labels from teacher models trained on different datasets/tasks, is then used to train a student model with multi-task learning. We evaluate the feature representations of the student model on 6 vision tasks including image recognition (classification, detection, segmentation)and 3D geometry estimation (depth and surface normal estimation). MuST is scalable with unlabeled or partially labeled datasets and outperforms both specialized supervised models and self-supervised models when training on large scale datasets. Lastly, we show MuST can improve upon already strong checkpoints trained with billions of examples. The results suggest self-training is a promising direction to aggregate labeled and unlabeled training data for learning general feature representations.
CoAtNet: Marrying Convolution and Attention for All Data Sizes
Jun 09, 2021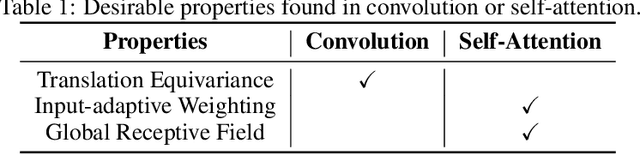
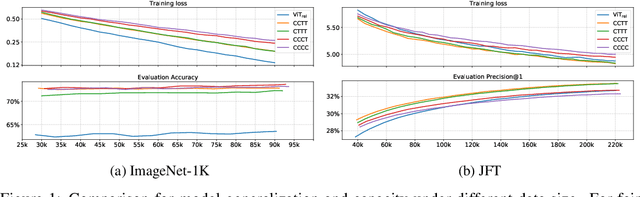
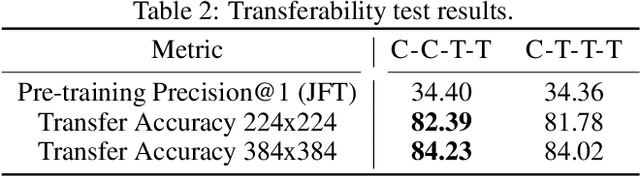
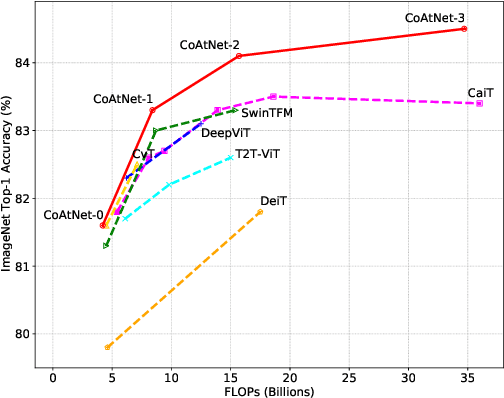
Transformers have attracted increasing interests in computer vision, but they still fall behind state-of-the-art convolutional networks. In this work, we show that while Transformers tend to have larger model capacity, their generalization can be worse than convolutional networks due to the lack of the right inductive bias. To effectively combine the strengths from both architectures, we present CoAtNets(pronounced "coat" nets), a family of hybrid models built from two key insights:(1) depthwise Convolution and self-Attention can be naturally unified via simple relative attention; (2) vertically stacking convolution layers and attention layers in a principled way is surprisingly effective in improving generalization, capacity and efficiency. Experiments show that our CoAtNets achieve state-of-the-art performance under different resource constraints across various datasets. For example, CoAtNet achieves 86.0% ImageNet top-1 accuracy without extra data, and 89.77% with extra JFT data, outperforming prior arts of both convolutional networks and Transformers. Notably, when pre-trained with 13M images fromImageNet-21K, our CoAtNet achieves 88.56% top-1 accuracy, matching ViT-huge pre-trained with 300M images from JFT while using 23x less data.
Pay Attention to MLPs
Jun 01, 2021
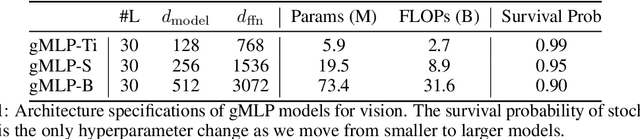
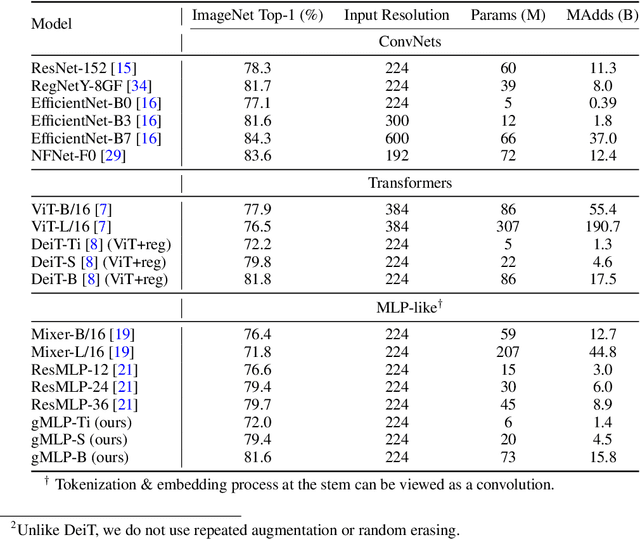
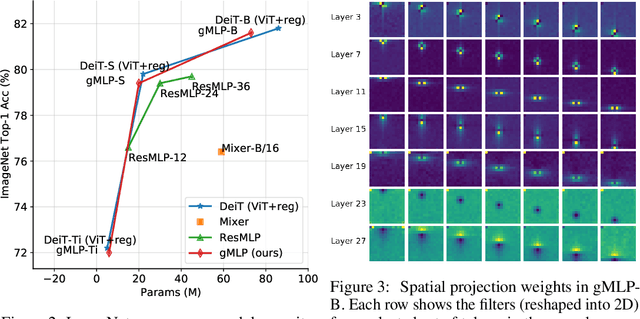
Transformers have become one of the most important architectural innovations in deep learning and have enabled many breakthroughs over the past few years. Here we propose a simple network architecture, gMLP, based on MLPs with gating, and show that it can perform as well as Transformers in key language and vision applications. Our comparisons show that self-attention is not critical for Vision Transformers, as gMLP can achieve the same accuracy. For BERT, our model achieves parity with Transformers on pretraining perplexity and is better on some downstream NLP tasks. On finetuning tasks where gMLP performs worse, making the gMLP model substantially larger can close the gap with Transformers. In general, our experiments show that gMLP can scale as well as Transformers over increased data and compute.