 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeGemini Embedding 2: A Native Multimodal Embedding Model from Gemini
May 26, 2026We introduce Gemini Embedding 2, a native multimodal embedding model that allows embedding video, audio, image, and text modalities in a unified representation space. We leverage the multimodal capabilities of Gemini to produce embeddings for arbitrary combinations of interleaved inputs across all these modalities that generalize well across a wide variety of tasks. Applying large-scale contrastive learning in a multi-task multi-stage training setup, we achieve state-of-the-art performance on key embedding benchmarks including unimodal, cross-modal, and multimodal retrieval spanning a diverse set of tasks. We show that our embedding model demonstrates strong performance (with a score of 62.9 R@1 on MSCOCO, 68.8 NDCG@10 on Vatex, 69.9 on MTEB multilingual and 84.0 on MTEB Code) across a variety of tasks surpassing the performance of specialized models. These unified capabilities make Gemini Embedding 2 a promising candidate for downstream use cases such as RAG, recommendation and search. Furthermore, its robust zero-shot performance across distinct fields - from astronomy and bioscience to fine arts and the culinary arts - establishes it as a highly reliable, out-of-the-box representation even for specialized domains.
NudgeVAD: Language-Nudged End-to-End Driving via FiLM Residuals
May 23, 2026Natural-language instructions promise controllable end-to-end driving, but their benefit can be hidden when planners already receive reliable high-level commands. We propose NudgeVAD, a frozen-planner residual framework that uses language as a calibrated nudge to a VAD trajectory. With identity-initialized FiLM and a zero-initialized residual head, NudgeVAD is equivalent to the frozen planner at initialization, so learned deviations arise only from language-conditioned residuals. We evaluate NudgeVAD along a command-reliability axis. With reliable commands, language improves the initial planner but becomes nearly redundant once compared against VAD-FT (UNCOND), a compute-matched VAD model fine-tuned without language. With random commands, however, language becomes essential: detaching text degrades ADE6s to 3.166 m, while NudgeVAD with text recovers 2.806 m and outperforms VAD-FT (UNCOND) by 0.312 m. These results show that language is not universally additive; it is most valuable when the categorical command channel is unreliable.
ADAPT: Benchmarking Commonsense Planning under Unspecified Affordance Constraints
Apr 16, 2026Intelligent embodied agents should not simply follow instructions, as real-world environments often involve unexpected conditions and exceptions. However, existing methods usually focus on directly executing instructions, without considering whether the target objects can actually be manipulated, meaning they fail to assess available affordances. To address this limitation, we introduce DynAfford, a benchmark that evaluates embodied agents in dynamic environments where object affordances may change over time and are not specified in the instruction. DynAfford requires agents to perceive object states, infer implicit preconditions, and adapt their actions accordingly. To enable this capability, we introduce ADAPT, a plug-and-play module that augments existing planners with explicit affordance reasoning. Experiments demonstrate that incorporating ADAPT significantly improves robustness and task success across both seen and unseen environments. We also show that a domain-adapted, LoRA-finetuned vision-language model used as the affordance inference backend outperforms a commercial LLM (GPT-4o), highlighting the importance of task-aligned affordance grounding.
Uncertainty-Aware Vision-based Risk Object Identification via Conformal Risk Tube Prediction
Mar 25, 2026We study object importance-based vision risk object identification (Vision-ROI), a key capability for hazard detection in intelligent driving systems. Existing approaches make deterministic decisions and ignore uncertainty, which could lead to safety-critical failures. Specifically, in ambiguous scenarios, fixed decision thresholds may cause premature or delayed risk detection and temporally unstable predictions, especially in complex scenes with multiple interacting risks. Despite these challenges, current methods lack a principled framework to model risk uncertainty jointly across space and time. We propose Conformal Risk Tube Prediction, a unified formulation that captures spatiotemporal risk uncertainty, provides coverage guarantees for true risks, and produces calibrated risk scores with uncertainty estimates. To conduct a systematic evaluation, we present a new dataset and metrics probing diverse scenario configurations with multi-risk coupling effects, which are not supported by existing datasets. We systematically analyze factors affecting uncertainty estimation, including scenario variations, per-risk category behavior, and perception error propagation. Our method delivers substantial improvements over prior approaches, enhancing vision-ROI robustness and downstream performance, such as reducing nuisance braking alerts. For more qualitative results, please visit our project webpage: https://hcis-lab.github.io/CRTP/
HetroD: A High-Fidelity Drone Dataset and Benchmark for Autonomous Driving in Heterogeneous Traffic
Feb 03, 2026We present HetroD, a dataset and benchmark for developing autonomous driving systems in heterogeneous environments. HetroD targets the critical challenge of navi- gating real-world heterogeneous traffic dominated by vulner- able road users (VRUs), including pedestrians, cyclists, and motorcyclists that interact with vehicles. These mixed agent types exhibit complex behaviors such as hook turns, lane splitting, and informal right-of-way negotiation. Such behaviors pose significant challenges for autonomous vehicles but remain underrepresented in existing datasets focused on structured, lane-disciplined traffic. To bridge the gap, we collect a large- scale drone-based dataset to provide a holistic observation of traffic scenes with centimeter-accurate annotations, HD maps, and traffic signal states. We further develop a modular toolkit for extracting per-agent scenarios to support downstream task development. In total, the dataset comprises over 65.4k high- fidelity agent trajectories, 70% of which are from VRUs. HetroD supports modeling of VRU behaviors in dense, het- erogeneous traffic and provides standardized benchmarks for forecasting, planning, and simulation tasks. Evaluation results reveal that state-of-the-art prediction and planning models struggle with the challenges presented by our dataset: they fail to predict lateral VRU movements, cannot handle unstructured maneuvers, and exhibit limited performance in dense and multi-agent scenarios, highlighting the need for more robust approaches to heterogeneous traffic. See our project page for more examples: https://hetroddata.github.io/HetroD/
Affordance-Guided Coarse-to-Fine Exploration for Base Placement in Open-Vocabulary Mobile Manipulation
Nov 09, 2025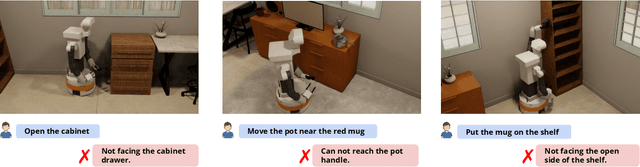
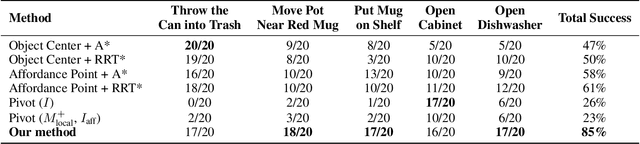
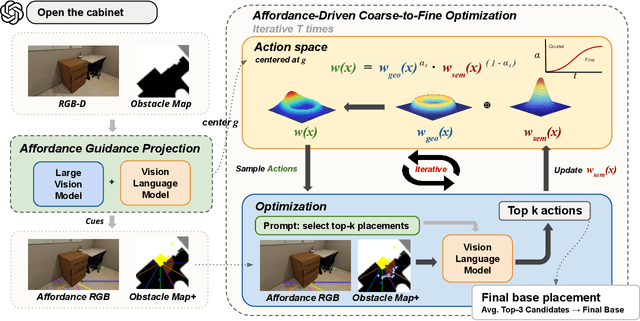

In open-vocabulary mobile manipulation (OVMM), task success often hinges on the selection of an appropriate base placement for the robot. Existing approaches typically navigate to proximity-based regions without considering affordances, resulting in frequent manipulation failures. We propose Affordance-Guided Coarse-to-Fine Exploration, a zero-shot framework for base placement that integrates semantic understanding from vision-language models (VLMs) with geometric feasibility through an iterative optimization process. Our method constructs cross-modal representations, namely Affordance RGB and Obstacle Map+, to align semantics with spatial context. This enables reasoning that extends beyond the egocentric limitations of RGB perception. To ensure interaction is guided by task-relevant affordances, we leverage coarse semantic priors from VLMs to guide the search toward task-relevant regions and refine placements with geometric constraints, thereby reducing the risk of convergence to local optima. Evaluated on five diverse open-vocabulary mobile manipulation tasks, our system achieves an 85% success rate, significantly outperforming classical geometric planners and VLM-based methods. This demonstrates the promise of affordance-aware and multimodal reasoning for generalizable, instruction-conditioned planning in OVMM.
GRITS: A Spillage-Aware Guided Diffusion Policy for Robot Food Scooping Tasks
Oct 01, 2025



Robotic food scooping is a critical manipulation skill for food preparation and service robots. However, existing robot learning algorithms, especially learn-from-demonstration methods, still struggle to handle diverse and dynamic food states, which often results in spillage and reduced reliability. In this work, we introduce GRITS: A Spillage-Aware Guided Diffusion Policy for Robot Food Scooping Tasks. This framework leverages guided diffusion policy to minimize food spillage during scooping and to ensure reliable transfer of food items from the initial to the target location. Specifically, we design a spillage predictor that estimates the probability of spillage given current observation and action rollout. The predictor is trained on a simulated dataset with food spillage scenarios, constructed from four primitive shapes (spheres, cubes, cones, and cylinders) with varied physical properties such as mass, friction, and particle size. At inference time, the predictor serves as a differentiable guidance signal, steering the diffusion sampling process toward safer trajectories while preserving task success. We validate GRITS on a real-world robotic food scooping platform. GRITS is trained on six food categories and evaluated on ten unseen categories with different shapes and quantities. GRITS achieves an 82% task success rate and a 4% spillage rate, reducing spillage by over 40% compared to baselines without guidance, thereby demonstrating its effectiveness.
Bridging Diffusion Models and 3D Representations: A 3D Consistent Super-Resolution Framework
Aug 06, 2025We propose 3D Super Resolution (3DSR), a novel 3D Gaussian-splatting-based super-resolution framework that leverages off-the-shelf diffusion-based 2D super-resolution models. 3DSR encourages 3D consistency across views via the use of an explicit 3D Gaussian-splatting-based scene representation. This makes the proposed 3DSR different from prior work, such as image upsampling or the use of video super-resolution, which either don't consider 3D consistency or aim to incorporate 3D consistency implicitly. Notably, our method enhances visual quality without additional fine-tuning, ensuring spatial coherence within the reconstructed scene. We evaluate 3DSR on MipNeRF360 and LLFF data, demonstrating that it produces high-resolution results that are visually compelling, while maintaining structural consistency in 3D reconstructions. Code will be released.
RC-AutoCalib: An End-to-End Radar-Camera Automatic Calibration Network
May 28, 2025This paper presents a groundbreaking approach - the first online automatic geometric calibration method for radar and camera systems. Given the significant data sparsity and measurement uncertainty in radar height data, achieving automatic calibration during system operation has long been a challenge. To address the sparsity issue, we propose a Dual-Perspective representation that gathers features from both frontal and bird's-eye views. The frontal view contains rich but sensitive height information, whereas the bird's-eye view provides robust features against height uncertainty. We thereby propose a novel Selective Fusion Mechanism to identify and fuse reliable features from both perspectives, reducing the effect of height uncertainty. Moreover, for each view, we incorporate a Multi-Modal Cross-Attention Mechanism to explicitly find location correspondences through cross-modal matching. During the training phase, we also design a Noise-Resistant Matcher to provide better supervision and enhance the robustness of the matching mechanism against sparsity and height uncertainty. Our experimental results, tested on the nuScenes dataset, demonstrate that our method significantly outperforms previous radar-camera auto-calibration methods, as well as existing state-of-the-art LiDAR-camera calibration techniques, establishing a new benchmark for future research. The code is available at https://github.com/nycu-acm/RC-AutoCalib.
Toward Real-world BEV Perception: Depth Uncertainty Estimation via Gaussian Splatting
Apr 03, 2025



Bird's-eye view (BEV) perception has gained significant attention because it provides a unified representation to fuse multiple view images and enables a wide range of down-stream autonomous driving tasks, such as forecasting and planning. Recent state-of-the-art models utilize projection-based methods which formulate BEV perception as query learning to bypass explicit depth estimation. While we observe promising advancements in this paradigm, they still fall short of real-world applications because of the lack of uncertainty modeling and expensive computational requirement. In this work, we introduce GaussianLSS, a novel uncertainty-aware BEV perception framework that revisits unprojection-based methods, specifically the Lift-Splat-Shoot (LSS) paradigm, and enhances them with depth un-certainty modeling. GaussianLSS represents spatial dispersion by learning a soft depth mean and computing the variance of the depth distribution, which implicitly captures object extents. We then transform the depth distribution into 3D Gaussians and rasterize them to construct uncertainty-aware BEV features. We evaluate GaussianLSS on the nuScenes dataset, achieving state-of-the-art performance compared to unprojection-based methods. In particular, it provides significant advantages in speed, running 2.5x faster, and in memory efficiency, using 0.3x less memory compared to projection-based methods, while achieving competitive performance with only a 0.4% IoU difference.