 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeHumanX: Toward Agile and Generalizable Humanoid Interaction Skills from Human Videos
Feb 02, 2026Enabling humanoid robots to perform agile and adaptive interactive tasks has long been a core challenge in robotics. Current approaches are bottlenecked by either the scarcity of realistic interaction data or the need for meticulous, task-specific reward engineering, which limits their scalability. To narrow this gap, we present HumanX, a full-stack framework that compiles human video into generalizable, real-world interaction skills for humanoids, without task-specific rewards. HumanX integrates two co-designed components: XGen, a data generation pipeline that synthesizes diverse and physically plausible robot interaction data from video while supporting scalable data augmentation; and XMimic, a unified imitation learning framework that learns generalizable interaction skills. Evaluated across five distinct domains--basketball, football, badminton, cargo pickup, and reactive fighting--HumanX successfully acquires 10 different skills and transfers them zero-shot to a physical Unitree G1 humanoid. The learned capabilities include complex maneuvers such as pump-fake turnaround fadeaway jumpshots without any external perception, as well as interactive tasks like sustained human-robot passing sequences over 10 consecutive cycles--learned from a single video demonstration. Our experiments show that HumanX achieves over 8 times higher generalization success than prior methods, demonstrating a scalable and task-agnostic pathway for learning versatile, real-world robot interactive skills.
Gaussian Belief Propagation Network for Depth Completion
Jan 29, 2026Depth completion aims to predict a dense depth map from a color image with sparse depth measurements. Although deep learning methods have achieved state-of-the-art (SOTA), effectively handling the sparse and irregular nature of input depth data in deep networks remains a significant challenge, often limiting performance, especially under high sparsity. To overcome this limitation, we introduce the Gaussian Belief Propagation Network (GBPN), a novel hybrid framework synergistically integrating deep learning with probabilistic graphical models for end-to-end depth completion. Specifically, a scene-specific Markov Random Field (MRF) is dynamically constructed by the Graphical Model Construction Network (GMCN), and then inferred via Gaussian Belief Propagation (GBP) to yield the dense depth distribution. Crucially, the GMCN learns to construct not only the data-dependent potentials of MRF but also its structure by predicting adaptive non-local edges, enabling the capture of complex, long-range spatial dependencies. Furthermore, we enhance GBP with a serial \& parallel message passing scheme, designed for effective information propagation, particularly from sparse measurements. Extensive experiments demonstrate that GBPN achieves SOTA performance on the NYUv2 and KITTI benchmarks. Evaluations across varying sparsity levels, sparsity patterns, and datasets highlight GBPN's superior performance, notable robustness, and generalizable capability.
Geometry-Grounded Gaussian Splatting
Jan 25, 2026Gaussian Splatting (GS) has demonstrated impressive quality and efficiency in novel view synthesis. However, shape extraction from Gaussian primitives remains an open problem. Due to inadequate geometry parameterization and approximation, existing shape reconstruction methods suffer from poor multi-view consistency and are sensitive to floaters. In this paper, we present a rigorous theoretical derivation that establishes Gaussian primitives as a specific type of stochastic solids. This theoretical framework provides a principled foundation for Geometry-Grounded Gaussian Splatting by enabling the direct treatment of Gaussian primitives as explicit geometric representations. Using the volumetric nature of stochastic solids, our method efficiently renders high-quality depth maps for fine-grained geometry extraction. Experiments show that our method achieves the best shape reconstruction results among all Gaussian Splatting-based methods on public datasets.
Learning Generalizable Hand-Object Tracking from Synthetic Demonstrations
Dec 22, 2025We present a system for learning generalizable hand-object tracking controllers purely from synthetic data, without requiring any human demonstrations. Our approach makes two key contributions: (1) HOP, a Hand-Object Planner, which can synthesize diverse hand-object trajectories; and (2) HOT, a Hand-Object Tracker that bridges synthetic-to-physical transfer through reinforcement learning and interaction imitation learning, delivering a generalizable controller conditioned on target hand-object states. Our method extends to diverse object shapes and hand morphologies. Through extensive evaluations, we show that our approach enables dexterous hands to track challenging, long-horizon sequences including object re-arrangement and agile in-hand reorientation. These results represent a significant step toward scalable foundation controllers for manipulation that can learn entirely from synthetic data, breaking the data bottleneck that has long constrained progress in dexterous manipulation.
SceneMaker: Open-set 3D Scene Generation with Decoupled De-occlusion and Pose Estimation Model
Dec 11, 2025We propose a decoupled 3D scene generation framework called SceneMaker in this work. Due to the lack of sufficient open-set de-occlusion and pose estimation priors, existing methods struggle to simultaneously produce high-quality geometry and accurate poses under severe occlusion and open-set settings. To address these issues, we first decouple the de-occlusion model from 3D object generation, and enhance it by leveraging image datasets and collected de-occlusion datasets for much more diverse open-set occlusion patterns. Then, we propose a unified pose estimation model that integrates global and local mechanisms for both self-attention and cross-attention to improve accuracy. Besides, we construct an open-set 3D scene dataset to further extend the generalization of the pose estimation model. Comprehensive experiments demonstrate the superiority of our decoupled framework on both indoor and open-set scenes. Our codes and datasets is released at https://idea-research.github.io/SceneMaker/.
SPATIALGEN: Layout-guided 3D Indoor Scene Generation
Sep 18, 2025
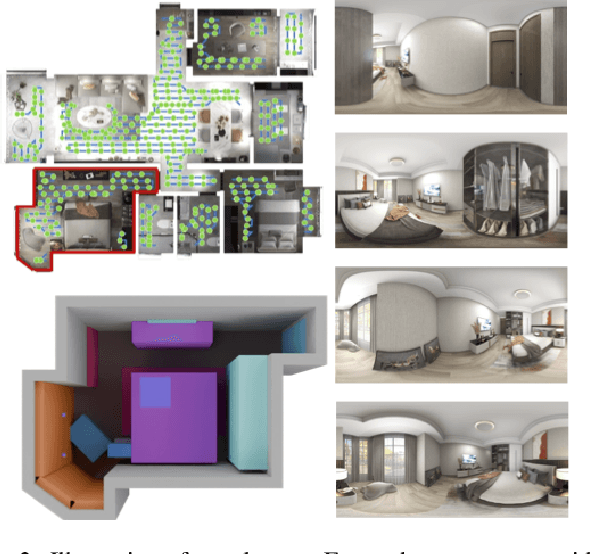
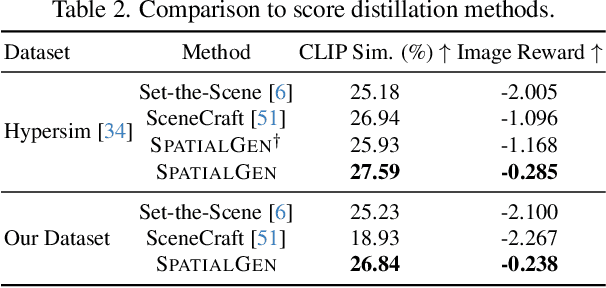
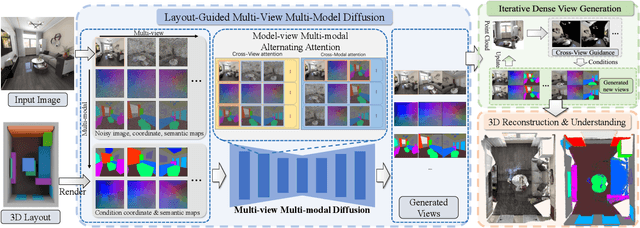
Creating high-fidelity 3D models of indoor environments is essential for applications in design, virtual reality, and robotics. However, manual 3D modeling remains time-consuming and labor-intensive. While recent advances in generative AI have enabled automated scene synthesis, existing methods often face challenges in balancing visual quality, diversity, semantic consistency, and user control. A major bottleneck is the lack of a large-scale, high-quality dataset tailored to this task. To address this gap, we introduce a comprehensive synthetic dataset, featuring 12,328 structured annotated scenes with 57,440 rooms, and 4.7M photorealistic 2D renderings. Leveraging this dataset, we present SpatialGen, a novel multi-view multi-modal diffusion model that generates realistic and semantically consistent 3D indoor scenes. Given a 3D layout and a reference image (derived from a text prompt), our model synthesizes appearance (color image), geometry (scene coordinate map), and semantic (semantic segmentation map) from arbitrary viewpoints, while preserving spatial consistency across modalities. SpatialGen consistently generates superior results to previous methods in our experiments. We are open-sourcing our data and models to empower the community and advance the field of indoor scene understanding and generation.
SAIL-Recon: Large SfM by Augmenting Scene Regression with Localization
Aug 25, 2025



Scene regression methods, such as VGGT, solve the Structure-from-Motion (SfM) problem by directly regressing camera poses and 3D scene structures from input images. They demonstrate impressive performance in handling images under extreme viewpoint changes. However, these methods struggle to handle a large number of input images. To address this problem, we introduce SAIL-Recon, a feed-forward Transformer for large scale SfM, by augmenting the scene regression network with visual localization capabilities. Specifically, our method first computes a neural scene representation from a subset of anchor images. The regression network is then fine-tuned to reconstruct all input images conditioned on this neural scene representation. Comprehensive experiments show that our method not only scales efficiently to large-scale scenes, but also achieves state-of-the-art results on both camera pose estimation and novel view synthesis benchmarks, including TUM-RGBD, CO3Dv2, and Tanks & Temples. We will publish our model and code. Code and models are publicly available at: https://hkust-sail.github.io/ sail-recon/.
MGVQ: Could VQ-VAE Beat VAE? A Generalizable Tokenizer with Multi-group Quantization
Jul 10, 2025



Vector Quantized Variational Autoencoders (VQ-VAEs) are fundamental models that compress continuous visual data into discrete tokens. Existing methods have tried to improve the quantization strategy for better reconstruction quality, however, there still exists a large gap between VQ-VAEs and VAEs. To narrow this gap, we propose \NickName, a novel method to augment the representation capability of discrete codebooks, facilitating easier optimization for codebooks and minimizing information loss, thereby enhancing reconstruction quality. Specifically, we propose to retain the latent dimension to preserve encoded features and incorporate a set of sub-codebooks for quantization. Furthermore, we construct comprehensive zero-shot benchmarks featuring resolutions of 512p and 2k to evaluate the reconstruction performance of existing methods rigorously. \NickName~achieves the \textbf{state-of-the-art performance on both ImageNet and $8$ zero-shot benchmarks} across all VQ-VAEs. Notably, compared with SD-VAE, we outperform them on ImageNet significantly, with rFID $\textbf{0.49}$ v.s. $\textbf{0.91}$, and achieve superior PSNR on all zero-shot benchmarks. These results highlight the superiority of \NickName~in reconstruction and pave the way for preserving fidelity in HD image processing tasks. Code will be publicly available at https://github.com/MKJia/MGVQ.
SpatialLM: Training Large Language Models for Structured Indoor Modeling
Jun 09, 2025



SpatialLM is a large language model designed to process 3D point cloud data and generate structured 3D scene understanding outputs. These outputs include architectural elements like walls, doors, windows, and oriented object boxes with their semantic categories. Unlike previous methods which exploit task-specific network designs, our model adheres to the standard multimodal LLM architecture and is fine-tuned directly from open-source LLMs. To train SpatialLM, we collect a large-scale, high-quality synthetic dataset consisting of the point clouds of 12,328 indoor scenes (54,778 rooms) with ground-truth 3D annotations, and conduct a careful study on various modeling and training decisions. On public benchmarks, our model gives state-of-the-art performance in layout estimation and competitive results in 3D object detection. With that, we show a feasible path for enhancing the spatial understanding capabilities of modern LLMs for applications in augmented reality, embodied robotics, and more.
UniTEX: Universal High Fidelity Generative Texturing for 3D Shapes
May 29, 2025We present UniTEX, a novel two-stage 3D texture generation framework to create high-quality, consistent textures for 3D assets. Existing approaches predominantly rely on UV-based inpainting to refine textures after reprojecting the generated multi-view images onto the 3D shapes, which introduces challenges related to topological ambiguity. To address this, we propose to bypass the limitations of UV mapping by operating directly in a unified 3D functional space. Specifically, we first propose that lifts texture generation into 3D space via Texture Functions (TFs)--a continuous, volumetric representation that maps any 3D point to a texture value based solely on surface proximity, independent of mesh topology. Then, we propose to predict these TFs directly from images and geometry inputs using a transformer-based Large Texturing Model (LTM). To further enhance texture quality and leverage powerful 2D priors, we develop an advanced LoRA-based strategy for efficiently adapting large-scale Diffusion Transformers (DiTs) for high-quality multi-view texture synthesis as our first stage. Extensive experiments demonstrate that UniTEX achieves superior visual quality and texture integrity compared to existing approaches, offering a generalizable and scalable solution for automated 3D texture generation. Code will available in: https://github.com/YixunLiang/UniTEX.