 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeLearning Object Bounding Boxes for 3D Instance Segmentation on Point Clouds
Jun 04, 2019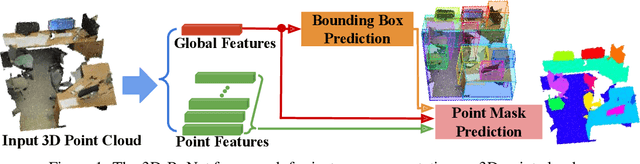
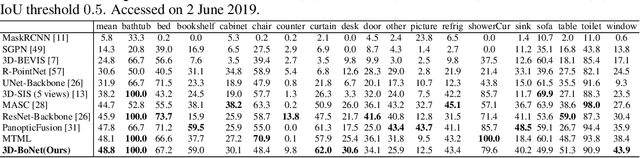
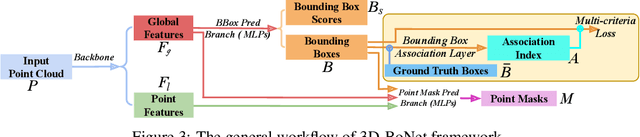
We propose a novel, conceptually simple and general framework for instance segmentation on 3D point clouds. Our method, called 3D-BoNet, follows the simple design philosophy of per-point multilayer perceptrons (MLPs). The framework directly regresses 3D bounding boxes for all instances in a point cloud, while simultaneously predicting a point-level mask for each instance. It consists of a backbone network followed by two parallel network branches for 1) bounding box regression and 2) point mask prediction. 3D-BoNet is single-stage, anchor-free and end-to-end trainable. Moreover, it is remarkably computationally efficient as, unlike existing approaches, it does not require any post-processing steps such as non-maximum suppression, feature sampling, clustering or voting. Extensive experiments show that our approach surpasses existing work on both ScanNet and S3DIS datasets while being approximately 10x more computationally efficient. Comprehensive ablation studies demonstrate the effectiveness of our design.
Learning Monocular Visual Odometry through Geometry-Aware Curriculum Learning
Mar 25, 2019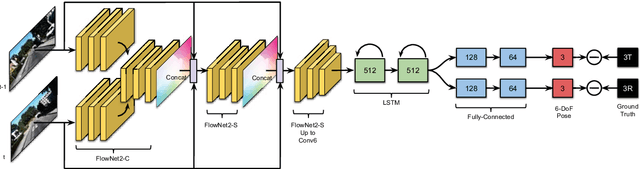
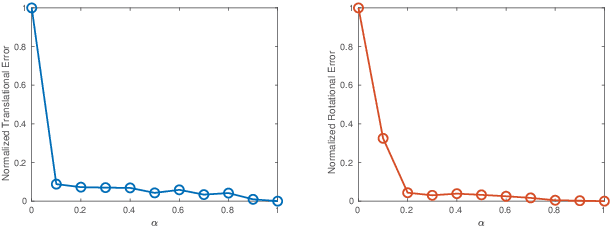
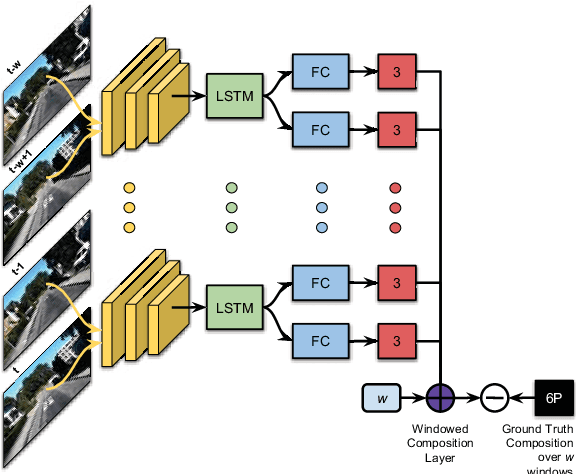
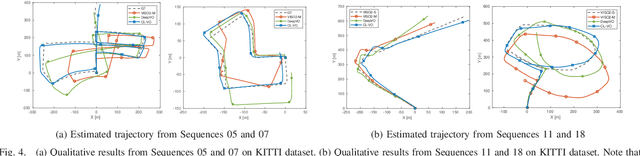
Inspired by the cognitive process of humans and animals, Curriculum Learning (CL) trains a model by gradually increasing the difficulty of the training data. In this paper, we study whether CL can be applied to complex geometry problems like estimating monocular Visual Odometry (VO). Unlike existing CL approaches, we present a novel CL strategy for learning the geometry of monocular VO by gradually making the learning objective more difficult during training. To this end, we propose a novel geometry-aware objective function by jointly optimizing relative and composite transformations over small windows via bounded pose regression loss. A cascade optical flow network followed by recurrent network with a differentiable windowed composition layer, termed CL-VO, is devised to learn the proposed objective. Evaluation on three real-world datasets shows superior performance of CL-VO over state-of-the-art feature-based and learning-based VO.
WiSE-ALE: Wide Sample Estimator for Approximate Latent Embedding
Mar 18, 2019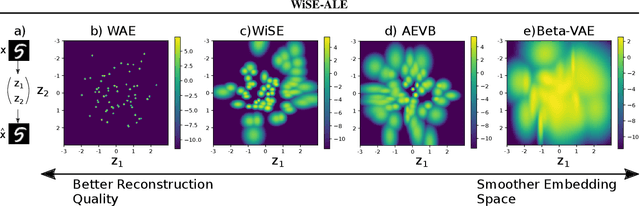
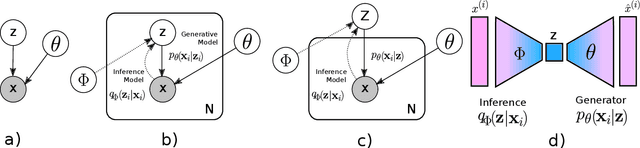
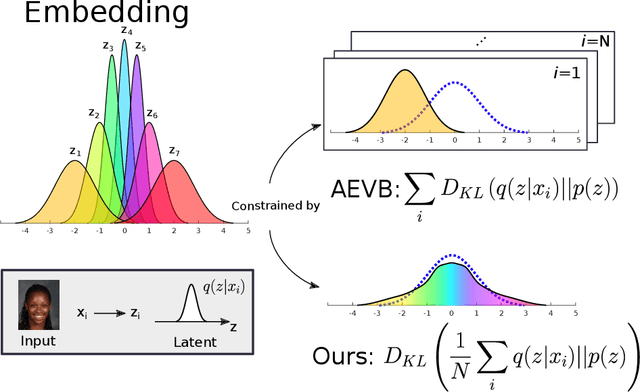
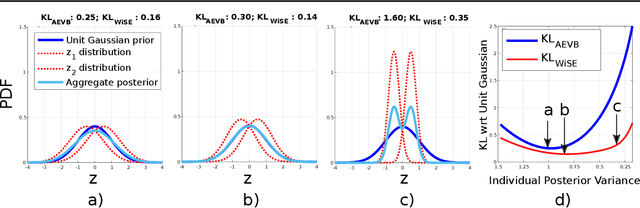
Variational Auto-encoders (VAEs) have been very successful as methods for forming compressed latent representations of complex, often high-dimensional, data. In this paper, we derive an alternative variational lower bound from the one common in VAEs, which aims to minimize aggregate information loss. Using our lower bound as the objective function for an auto-encoder enables us to place a prior on the bulk statistics, corresponding to an aggregate posterior for the entire dataset, as opposed to a single sample posterior as in the original VAE. This alternative form of prior constraint allows individual posteriors more flexibility to preserve necessary information for good reconstruction quality. We further derive an analytic approximation to our lower bound, leading to an efficient learning algorithm - WiSE-ALE. Through various examples, we demonstrate that WiSE-ALE can reach excellent reconstruction quality in comparison to other state-of-the-art VAE models, while still retaining the ability to learn a smooth, compact representation.
Selective Sensor Fusion for Neural Visual-Inertial Odometry
Mar 04, 2019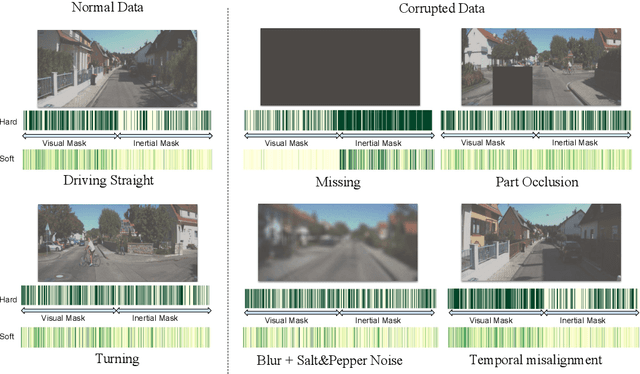
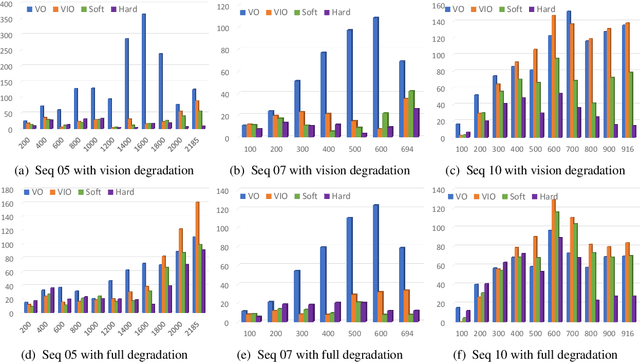
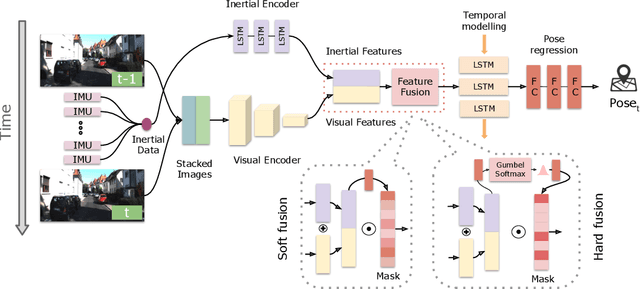
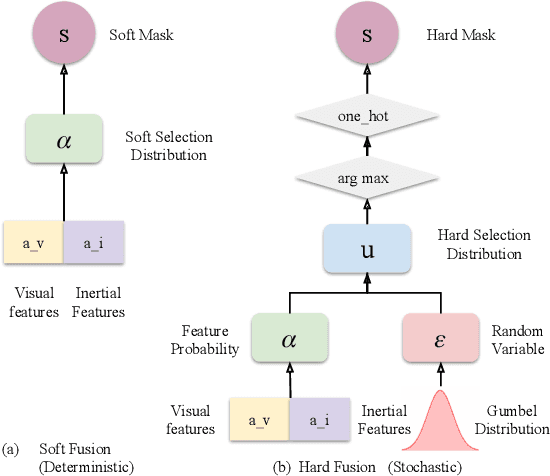
Deep learning approaches for Visual-Inertial Odometry (VIO) have proven successful, but they rarely focus on incorporating robust fusion strategies for dealing with imperfect input sensory data. We propose a novel end-to-end selective sensor fusion framework for monocular VIO, which fuses monocular images and inertial measurements in order to estimate the trajectory whilst improving robustness to real-life issues, such as missing and corrupted data or bad sensor synchronization. In particular, we propose two fusion modalities based on different masking strategies: deterministic soft fusion and stochastic hard fusion, and we compare with previously proposed direct fusion baselines. During testing, the network is able to selectively process the features of the available sensor modalities and produce a trajectory at scale. We present a thorough investigation on the performances on three public autonomous driving, Micro Aerial Vehicle (MAV) and hand-held VIO datasets. The results demonstrate the effectiveness of the fusion strategies, which offer better performances compared to direct fusion, particularly in presence of corrupted data. In addition, we study the interpretability of the fusion networks by visualising the masking layers in different scenarios and with varying data corruption, revealing interesting correlations between the fusion networks and imperfect sensory input data.
Learning with Training Wheels: Speeding up Training with a Simple Controller for Deep Reinforcement Learning
Dec 12, 2018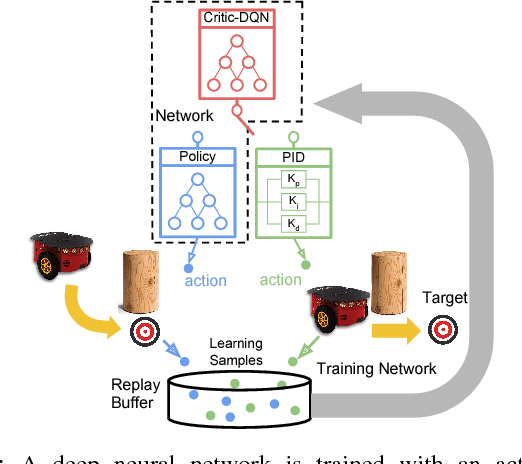
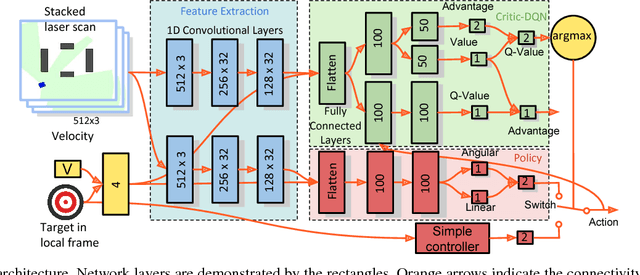
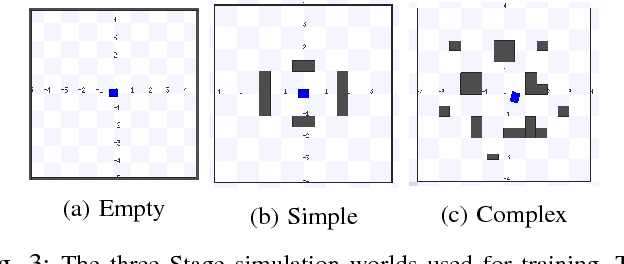
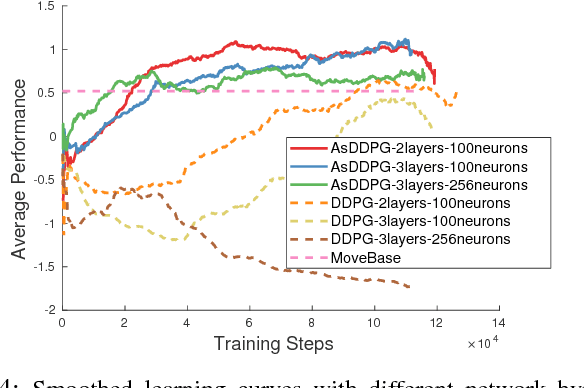
Deep Reinforcement Learning (DRL) has been applied successfully to many robotic applications. However, the large number of trials needed for training is a key issue. Most of existing techniques developed to improve training efficiency (e.g. imitation) target on general tasks rather than being tailored for robot applications, which have their specific context to benefit from. We propose a novel framework, Assisted Reinforcement Learning, where a classical controller (e.g. a PID controller) is used as an alternative, switchable policy to speed up training of DRL for local planning and navigation problems. The core idea is that the simple control law allows the robot to rapidly learn sensible primitives, like driving in a straight line, instead of random exploration. As the actor network becomes more advanced, it can then take over to perform more complex actions, like obstacle avoidance. Eventually, the simple controller can be discarded entirely. We show that not only does this technique train faster, it also is less sensitive to the structure of the DRL network and consistently outperforms a standard Deep Deterministic Policy Gradient network. We demonstrate the results in both simulation and real-world experiments.
Learning with Stochastic Guidance for Navigation
Nov 27, 2018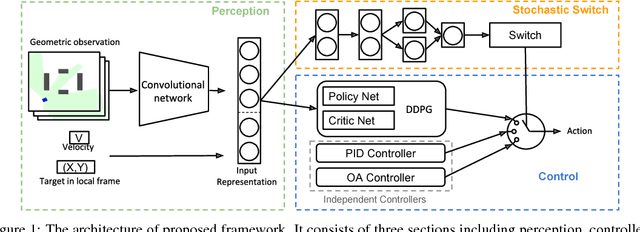
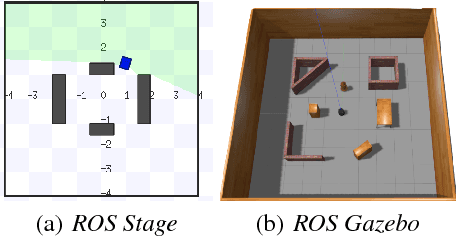
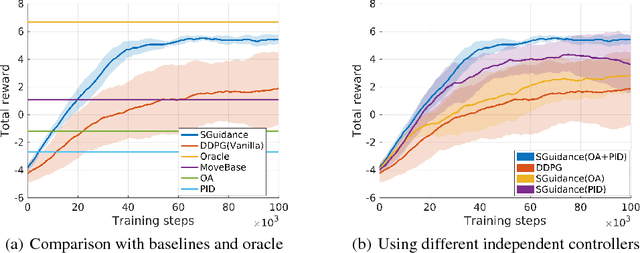
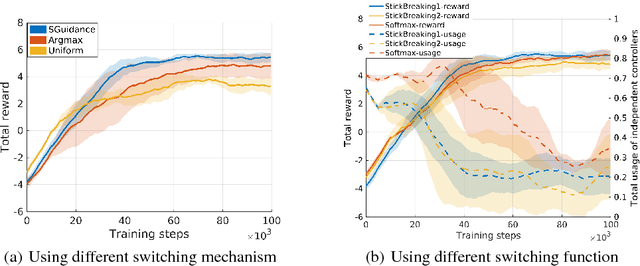
Due to the sparse rewards and high degree of environment variation, reinforcement learning approaches such as Deep Deterministic Policy Gradient (DDPG) are plagued by issues of high variance when applied in complex real world environments. We present a new framework for overcoming these issues by incorporating a stochastic switch, allowing an agent to choose between high and low variance policies. The stochastic switch can be jointly trained with the original DDPG in the same framework. In this paper, we demonstrate the power of the framework in a navigation task, where the robot can dynamically choose to learn through exploration, or to use the output of a heuristic controller as guidance. Instead of starting from completely random moves, the navigation capability of a robot can be quickly bootstrapped by several simple independent controllers. The experimental results show that with the aid of stochastic guidance we are able to effectively and efficiently train DDPG navigation policies and achieve significantly better performance than state-of-the-art baselines models.
3D-PhysNet: Learning the Intuitive Physics of Non-Rigid Object Deformations
Oct 24, 2018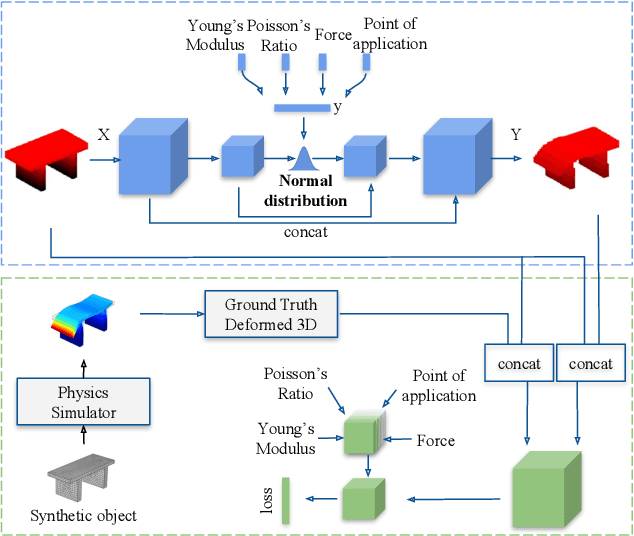
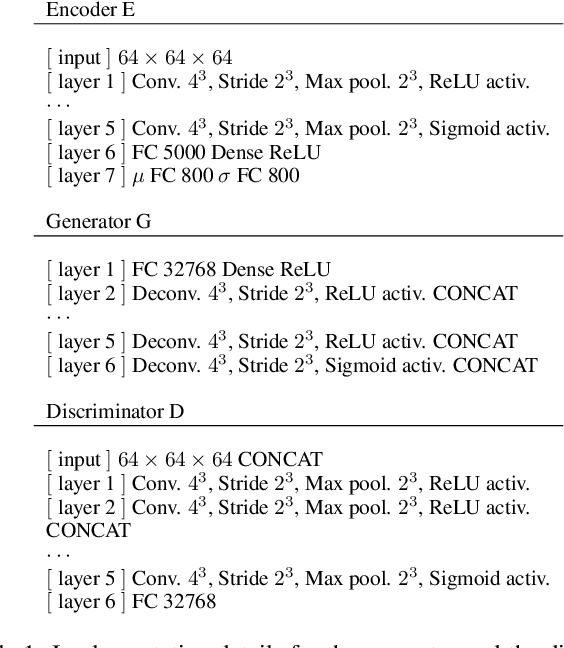
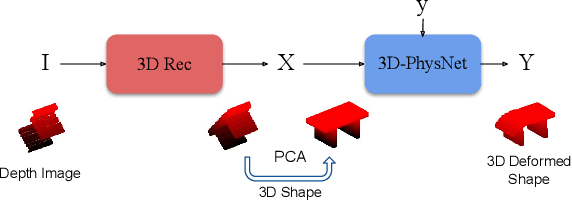
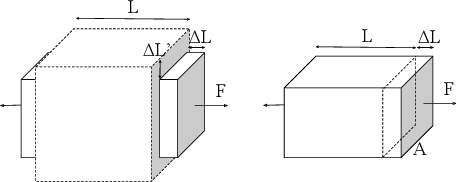
The ability to interact and understand the environment is a fundamental prerequisite for a wide range of applications from robotics to augmented reality. In particular, predicting how deformable objects will react to applied forces in real time is a significant challenge. This is further confounded by the fact that shape information about encountered objects in the real world is often impaired by occlusions, noise and missing regions e.g. a robot manipulating an object will only be able to observe a partial view of the entire solid. In this work we present a framework, 3D-PhysNet, which is able to predict how a three-dimensional solid will deform under an applied force using intuitive physics modelling. In particular, we propose a new method to encode the physical properties of the material and the applied force, enabling generalisation over materials. The key is to combine deep variational autoencoders with adversarial training, conditioned on the applied force and the material properties. We further propose a cascaded architecture that takes a single 2.5D depth view of the object and predicts its deformation. Training data is provided by a physics simulator. The network is fast enough to be used in real-time applications from partial views. Experimental results show the viability and the generalisation properties of the proposed architecture.
Transferring Physical Motion Between Domains for Neural Inertial Tracking
Oct 04, 2018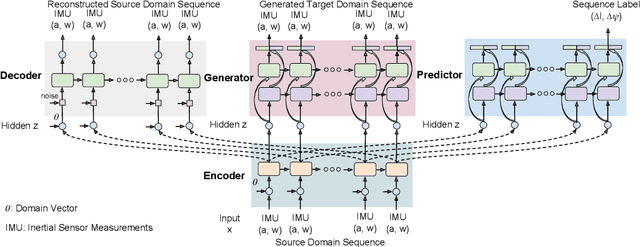
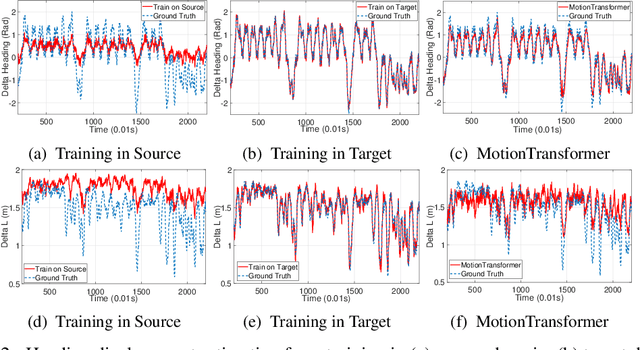
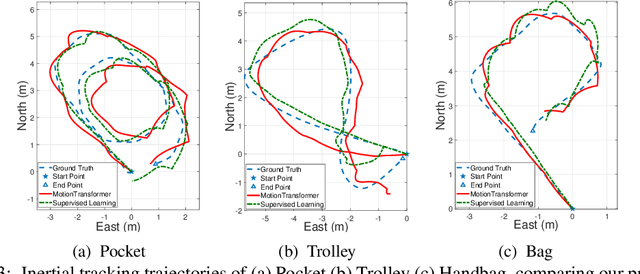
Inertial information processing plays a pivotal role in ego-motion awareness for mobile agents, as inertial measurements are entirely egocentric and not environment dependent. However, they are affected greatly by changes in sensor placement/orientation or motion dynamics, and it is infeasible to collect labelled data from every domain. To overcome the challenges of domain adaptation on long sensory sequences, we propose a novel framework that extracts domain-invariant features of raw sequences from arbitrary domains, and transforms to new domains without any paired data. Through the experiments, we demonstrate that it is able to efficiently and effectively convert the raw sequence from a new unlabelled target domain into an accurate inertial trajectory, benefiting from the physical motion knowledge transferred from the labelled source domain. We also conduct real-world experiments to show our framework can reconstruct physically meaningful trajectories from raw IMU measurements obtained with a standard mobile phone in various attachments.
GANVO: Unsupervised Deep Monocular Visual Odometry and Depth Estimation with Generative Adversarial Networks
Sep 20, 2018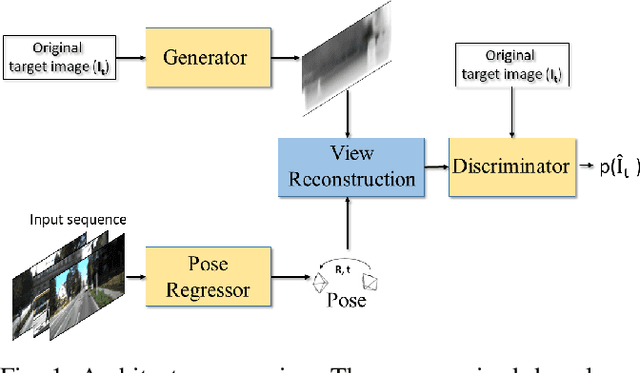
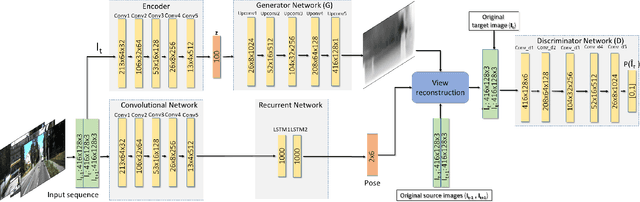
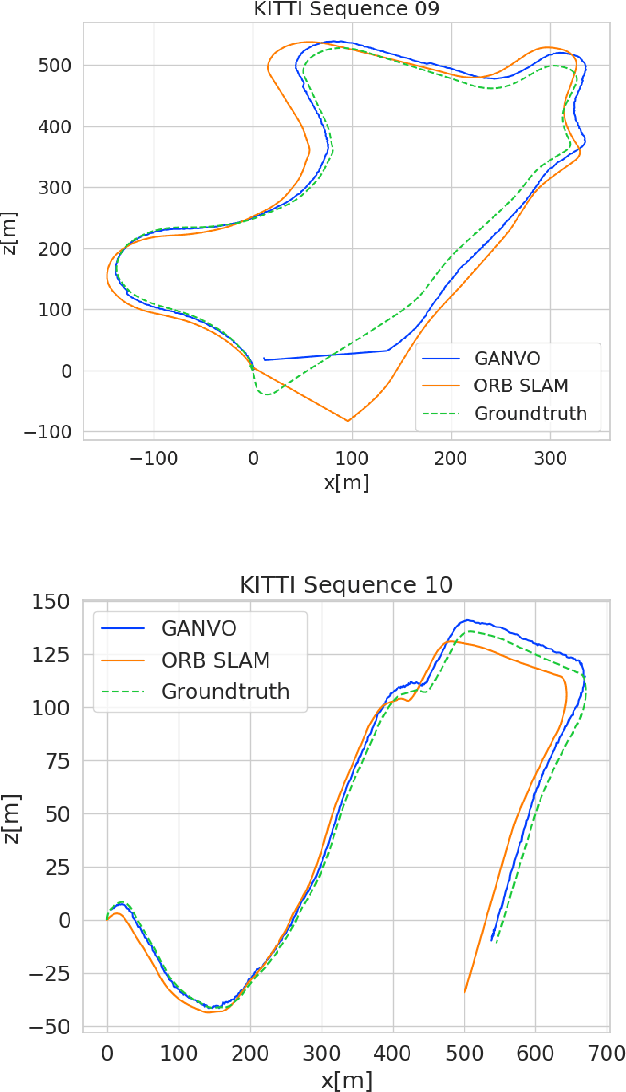
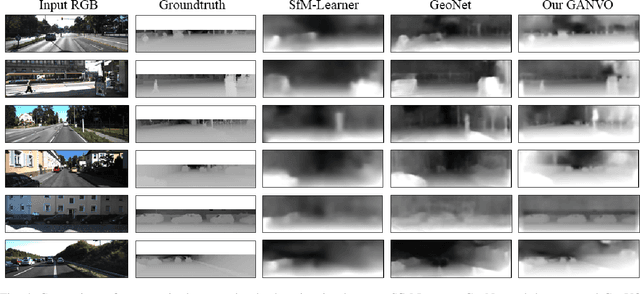
In the last decade, supervised deep learning approaches have been extensively employed in visual odometry (VO) applications, which is not feasible in environments where labelled data is not abundant. On the other hand, unsupervised deep learning approaches for localization and mapping in unknown environments from unlabelled data have received comparatively less attention in VO research. In this study, we propose a generative unsupervised learning framework that predicts 6-DoF pose camera motion and monocular depth map of the scene from unlabelled RGB image sequences, using deep convolutional Generative Adversarial Networks (GANs). We create a supervisory signal by warping view sequences and assigning the re-projection minimization to the objective loss function that is adopted in multi-view pose estimation and single-view depth generation network. Detailed quantitative and qualitative evaluations of the proposed framework on the KITTI and Cityscapes datasets show that the proposed method outperforms both existing traditional and unsupervised deep VO methods providing better results for both pose estimation and depth recovery.
OxIOD: The Dataset for Deep Inertial Odometry
Sep 20, 2018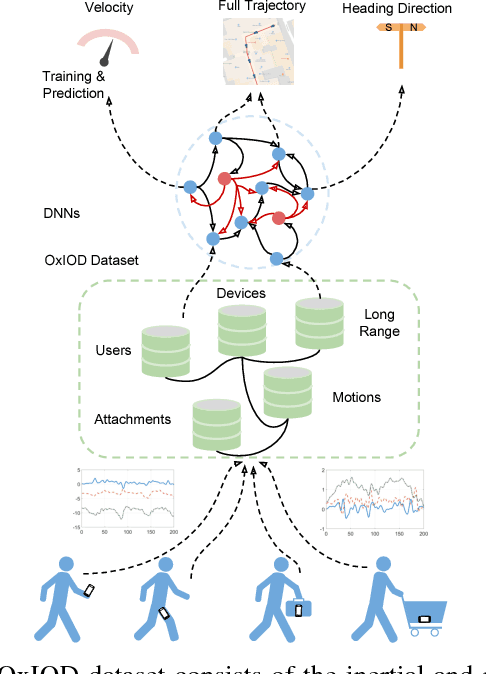
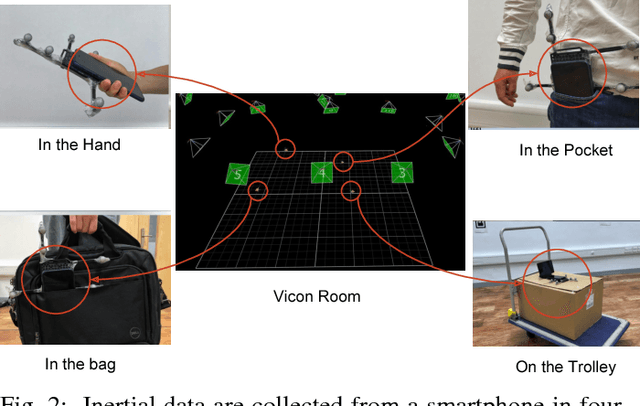
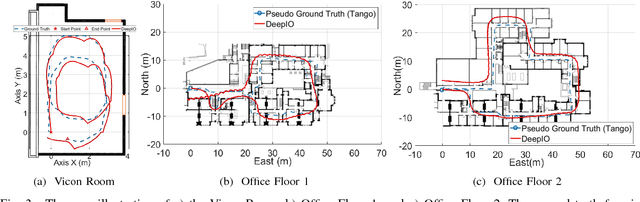
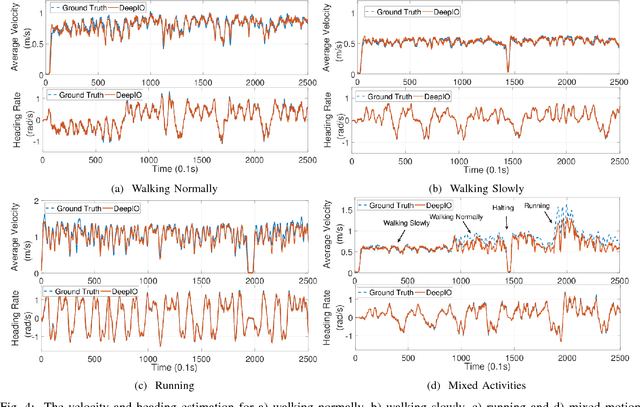
Advances in micro-electro-mechanical (MEMS) techniques enable inertial measurements units (IMUs) to be small, cheap, energy efficient, and widely used in smartphones, robots, and drones. Exploiting inertial data for accurate and reliable navigation and localization has attracted significant research and industrial interest, as IMU measurements are completely ego-centric and generally environment agnostic. Recent studies have shown that the notorious issue of drift can be significantly alleviated by using deep neural networks (DNNs), e.g. IONet. However, the lack of sufficient labelled data for training and testing various architectures limits the proliferation of adopting DNNs in IMU-based tasks. In this paper, we propose and release the Oxford Inertial Odometry Dataset (OxIOD), a first-of-its-kind data collection for inertial-odometry research, with all sequences having ground-truth labels. Our dataset contains 158 sequences totalling more than 42 km in total distance, much larger than previous inertial datasets. Another notable feature of this dataset lies in its diversity, which can reflect the complex motions of phone-based IMUs in various everyday usage. The measurements were collected with four different attachments (handheld, in the pocket, in the handbag and on the trolley), four motion modes (halting, walking slowly, walking normally, and running), five different users, four types of off-the-shelf consumer phones, and large-scale localization from office buildings. Deep inertial tracking experiments were conducted to show the effectiveness of our dataset in training deep neural network models and evaluate learning-based and model-based algorithms. The OxIOD Dataset is available at: http://deepio.cs.ox.ac.uk