 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeTrain Offline, Test Online: A Real Robot Learning Benchmark
Jun 01, 2023



Three challenges limit the progress of robot learning research: robots are expensive (few labs can participate), everyone uses different robots (findings do not generalize across labs), and we lack internet-scale robotics data. We take on these challenges via a new benchmark: Train Offline, Test Online (TOTO). TOTO provides remote users with access to shared robotic hardware for evaluating methods on common tasks and an open-source dataset of these tasks for offline training. Its manipulation task suite requires challenging generalization to unseen objects, positions, and lighting. We present initial results on TOTO comparing five pretrained visual representations and four offline policy learning baselines, remotely contributed by five institutions. The real promise of TOTO, however, lies in the future: we release the benchmark for additional submissions from any user, enabling easy, direct comparison to several methods without the need to obtain hardware or collect data.
NetHack is Hard to Hack
May 30, 2023



Neural policy learning methods have achieved remarkable results in various control problems, ranging from Atari games to simulated locomotion. However, these methods struggle in long-horizon tasks, especially in open-ended environments with multi-modal observations, such as the popular dungeon-crawler game, NetHack. Intriguingly, the NeurIPS 2021 NetHack Challenge revealed that symbolic agents outperformed neural approaches by over four times in median game score. In this paper, we delve into the reasons behind this performance gap and present an extensive study on neural policy learning for NetHack. To conduct this study, we analyze the winning symbolic agent, extending its codebase to track internal strategy selection in order to generate one of the largest available demonstration datasets. Utilizing this dataset, we examine (i) the advantages of an action hierarchy; (ii) enhancements in neural architecture; and (iii) the integration of reinforcement learning with imitation learning. Our investigations produce a state-of-the-art neural agent that surpasses previous fully neural policies by 127% in offline settings and 25% in online settings on median game score. However, we also demonstrate that mere scaling is insufficient to bridge the performance gap with the best symbolic models or even the top human players.
Dexterity from Touch: Self-Supervised Pre-Training of Tactile Representations with Robotic Play
Mar 21, 2023



Teaching dexterity to multi-fingered robots has been a longstanding challenge in robotics. Most prominent work in this area focuses on learning controllers or policies that either operate on visual observations or state estimates derived from vision. However, such methods perform poorly on fine-grained manipulation tasks that require reasoning about contact forces or about objects occluded by the hand itself. In this work, we present T-Dex, a new approach for tactile-based dexterity, that operates in two phases. In the first phase, we collect 2.5 hours of play data, which is used to train self-supervised tactile encoders. This is necessary to bring high-dimensional tactile readings to a lower-dimensional embedding. In the second phase, given a handful of demonstrations for a dexterous task, we learn non-parametric policies that combine the tactile observations with visual ones. Across five challenging dexterous tasks, we show that our tactile-based dexterity models outperform purely vision and torque-based models by an average of 1.7X. Finally, we provide a detailed analysis on factors critical to T-Dex including the importance of play data, architectures, and representation learning.
Teach a Robot to FISH: Versatile Imitation from One Minute of Demonstrations
Mar 02, 2023



While imitation learning provides us with an efficient toolkit to train robots, learning skills that are robust to environment variations remains a significant challenge. Current approaches address this challenge by relying either on large amounts of demonstrations that span environment variations or on handcrafted reward functions that require state estimates. Both directions are not scalable to fast imitation. In this work, we present Fast Imitation of Skills from Humans (FISH), a new imitation learning approach that can learn robust visual skills with less than a minute of human demonstrations. Given a weak base-policy trained by offline imitation of demonstrations, FISH computes rewards that correspond to the "match" between the robot's behavior and the demonstrations. These rewards are then used to adaptively update a residual policy that adds on to the base-policy. Across all tasks, FISH requires at most twenty minutes of interactive learning to imitate demonstrations on object configurations that were not seen in the demonstrations. Importantly, FISH is constructed to be versatile, which allows it to be used across robot morphologies (e.g. xArm, Allegro, Stretch) and camera configurations (e.g. third-person, eye-in-hand). Our experimental evaluations on 9 different tasks show that FISH achieves an average success rate of 93%, which is around 3.8x higher than prior state-of-the-art methods.
From Play to Policy: Conditional Behavior Generation from Uncurated Robot Data
Oct 19, 2022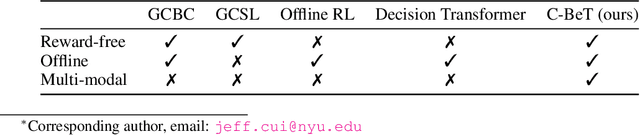
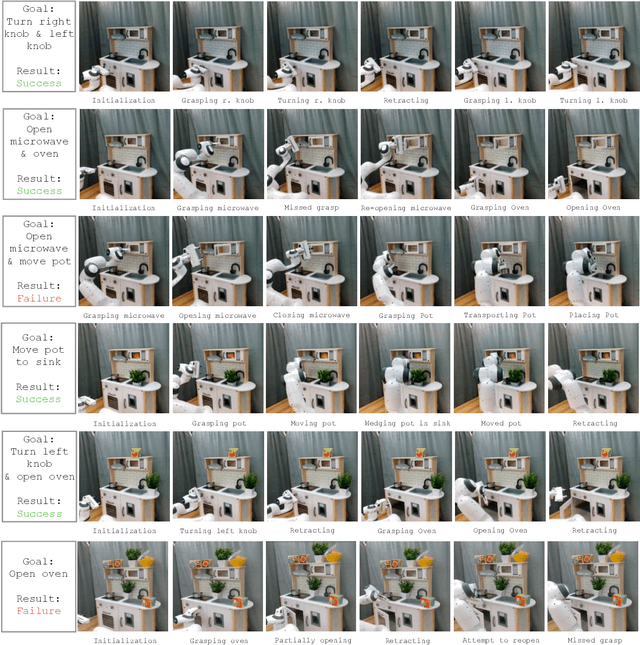
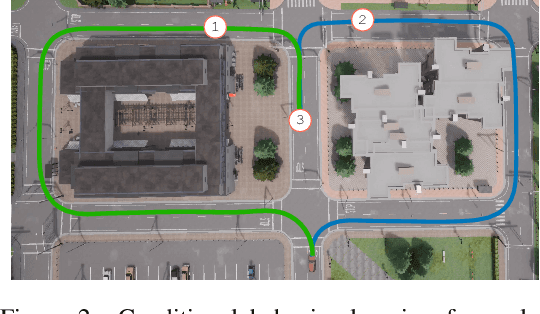

While large-scale sequence modeling from offline data has led to impressive performance gains in natural language and image generation, directly translating such ideas to robotics has been challenging. One critical reason for this is that uncurated robot demonstration data, i.e. play data, collected from non-expert human demonstrators are often noisy, diverse, and distributionally multi-modal. This makes extracting useful, task-centric behaviors from such data a difficult generative modeling problem. In this work, we present Conditional Behavior Transformers (C-BeT), a method that combines the multi-modal generation ability of Behavior Transformer with future-conditioned goal specification. On a suite of simulated benchmark tasks, we find that C-BeT improves upon prior state-of-the-art work in learning from play data by an average of 45.7%. Further, we demonstrate for the first time that useful task-centric behaviors can be learned on a real-world robot purely from play data without any task labels or reward information. Robot videos are best viewed on our project website: https://play-to-policy.github.io
Holo-Dex: Teaching Dexterity with Immersive Mixed Reality
Oct 12, 2022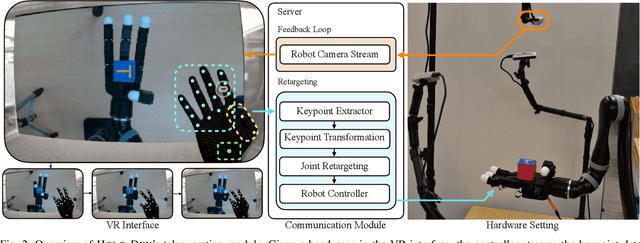
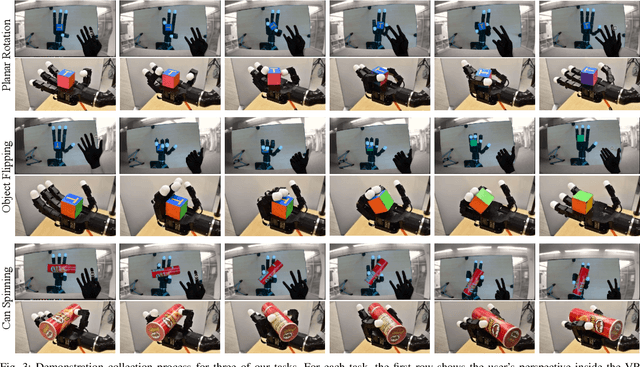
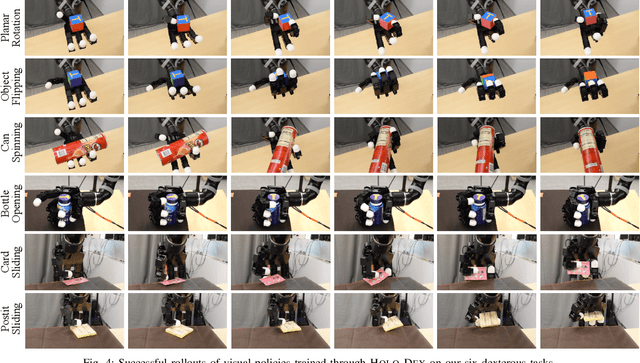

A fundamental challenge in teaching robots is to provide an effective interface for human teachers to demonstrate useful skills to a robot. This challenge is exacerbated in dexterous manipulation, where teaching high-dimensional, contact-rich behaviors often require esoteric teleoperation tools. In this work, we present Holo-Dex, a framework for dexterous manipulation that places a teacher in an immersive mixed reality through commodity VR headsets. The high-fidelity hand pose estimator onboard the headset is used to teleoperate the robot and collect demonstrations for a variety of general-purpose dexterous tasks. Given these demonstrations, we use powerful feature learning combined with non-parametric imitation to train dexterous skills. Our experiments on six common dexterous tasks, including in-hand rotation, spinning, and bottle opening, indicate that Holo-Dex can both collect high-quality demonstration data and train skills in a matter of hours. Finally, we find that our trained skills can exhibit generalization on objects not seen in training. Videos of Holo-Dex are available at https://holo-dex.github.io.
CLIP-Fields: Weakly Supervised Semantic Fields for Robotic Memory
Oct 11, 2022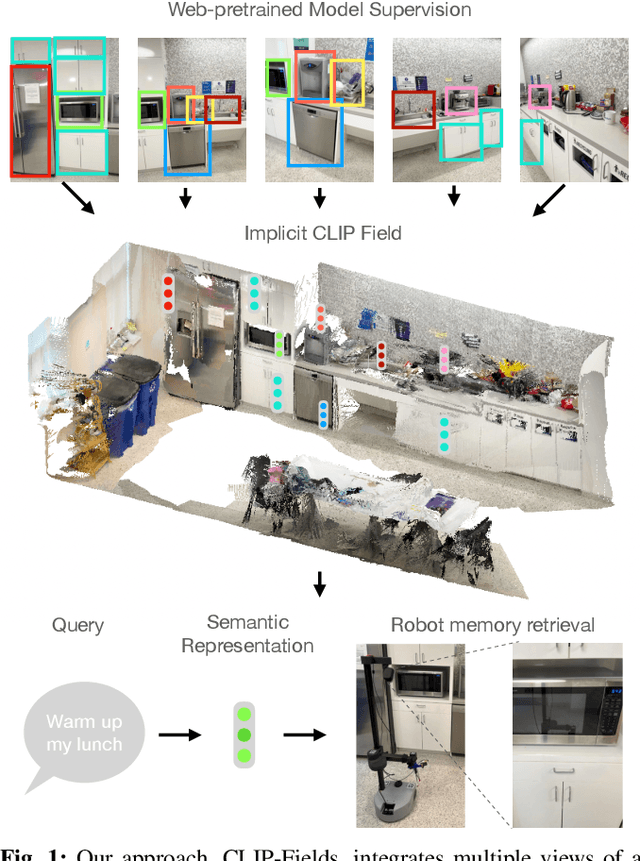
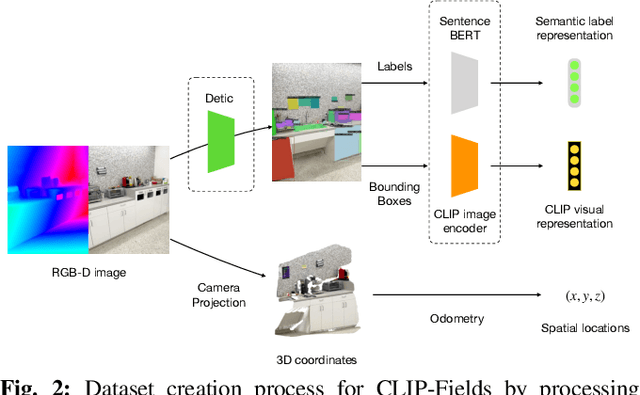
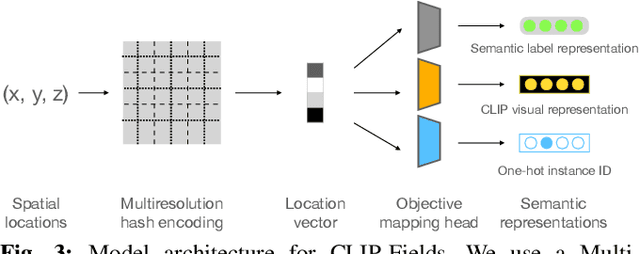
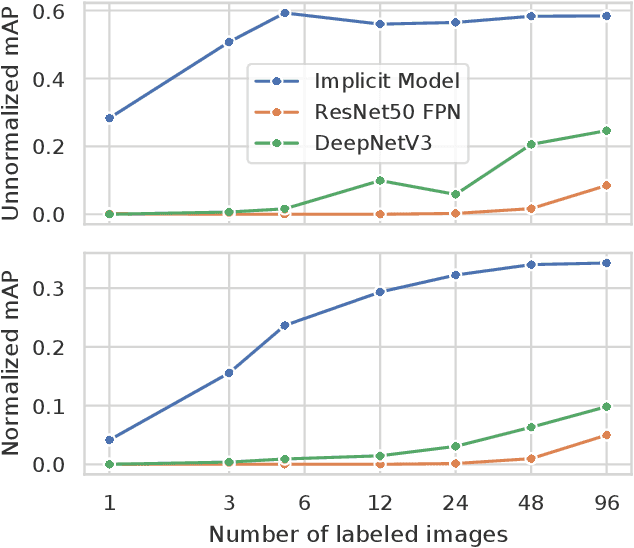
We propose CLIP-Fields, an implicit scene model that can be trained with no direct human supervision. This model learns a mapping from spatial locations to semantic embedding vectors. The mapping can then be used for a variety of tasks, such as segmentation, instance identification, semantic search over space, and view localization. Most importantly, the mapping can be trained with supervision coming only from web-image and web-text trained models such as CLIP, Detic, and Sentence-BERT. When compared to baselines like Mask-RCNN, our method outperforms on few-shot instance identification or semantic segmentation on the HM3D dataset with only a fraction of the examples. Finally, we show that using CLIP-Fields as a scene memory, robots can perform semantic navigation in real-world environments. Our code and demonstrations are available here: https://mahis.life/clip-fields/
That Sounds Right: Auditory Self-Supervision for Dynamic Robot Manipulation
Oct 03, 2022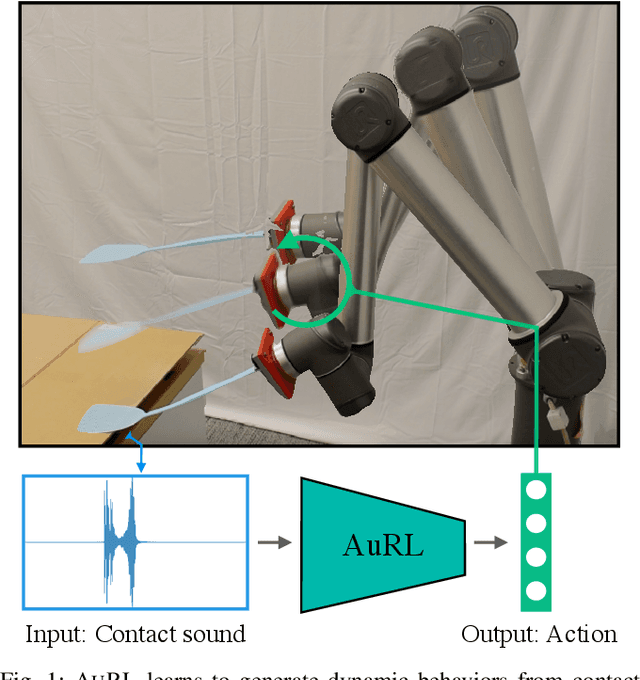
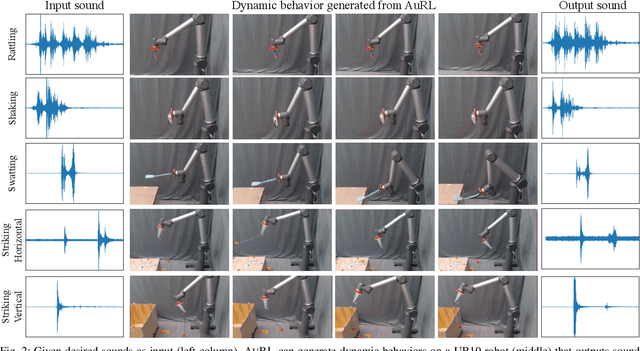
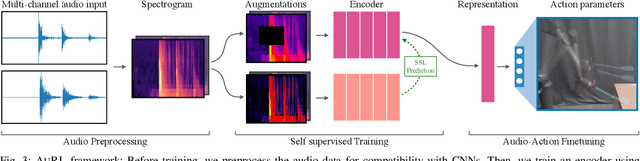
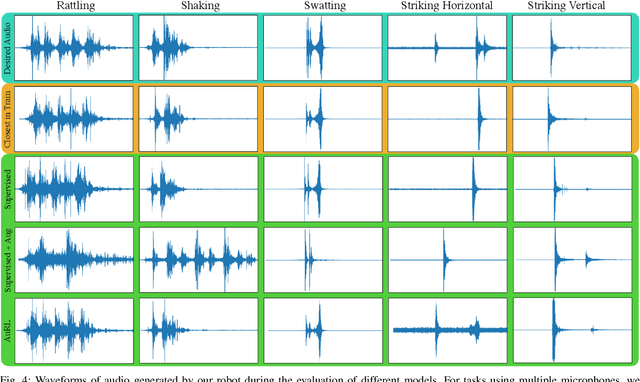
Learning to produce contact-rich, dynamic behaviors from raw sensory data has been a longstanding challenge in robotics. Prominent approaches primarily focus on using visual or tactile sensing, where unfortunately one fails to capture high-frequency interaction, while the other can be too delicate for large-scale data collection. In this work, we propose a data-centric approach to dynamic manipulation that uses an often ignored source of information: sound. We first collect a dataset of 25k interaction-sound pairs across five dynamic tasks using commodity contact microphones. Then, given this data, we leverage self-supervised learning to accelerate behavior prediction from sound. Our experiments indicate that this self-supervised 'pretraining' is crucial to achieving high performance, with a 34.5% lower MSE than plain supervised learning and a 54.3% lower MSE over visual training. Importantly, we find that when asked to generate desired sound profiles, online rollouts of our models on a UR10 robot can produce dynamic behavior that achieves an average of 11.5% improvement over supervised learning on audio similarity metrics.
Human Decision Makings on Curriculum Reinforcement Learning with Difficulty Adjustment
Aug 04, 2022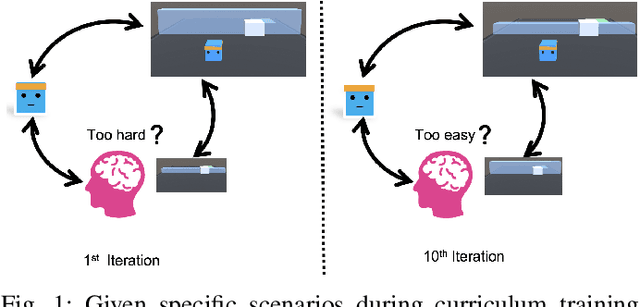
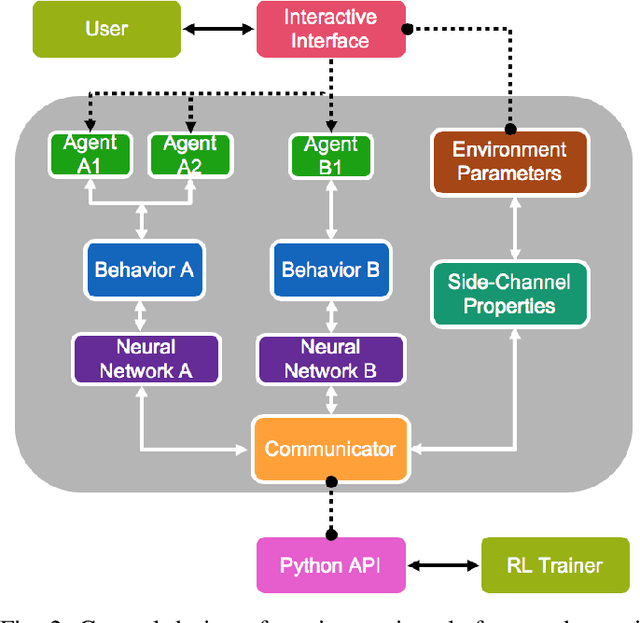
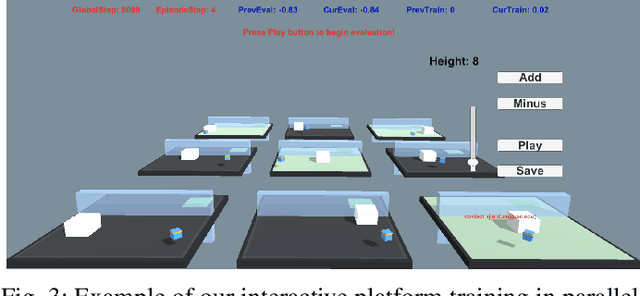
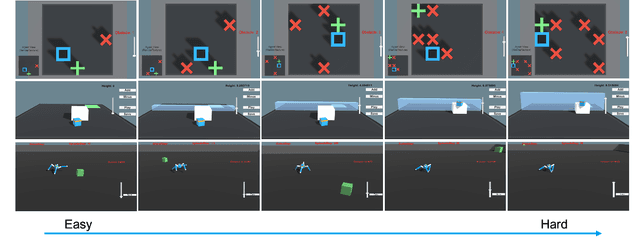
Human-centered AI considers human experiences with AI performance. While abundant research has been helping AI achieve superhuman performance either by fully automatic or weak supervision learning, fewer endeavors are experimenting with how AI can tailor to humans' preferred skill level given fine-grained input. In this work, we guide the curriculum reinforcement learning results towards a preferred performance level that is neither too hard nor too easy via learning from the human decision process. To achieve this, we developed a portable, interactive platform that enables the user to interact with agents online via manipulating the task difficulty, observing performance, and providing curriculum feedback. Our system is highly parallelizable, making it possible for a human to train large-scale reinforcement learning applications that require millions of samples without a server. The result demonstrates the effectiveness of an interactive curriculum for reinforcement learning involving human-in-the-loop. It shows reinforcement learning performance can successfully adjust in sync with the human desired difficulty level. We believe this research will open new doors for achieving flow and personalized adaptive difficulties.
Watch and Match: Supercharging Imitation with Regularized Optimal Transport
Jun 30, 2022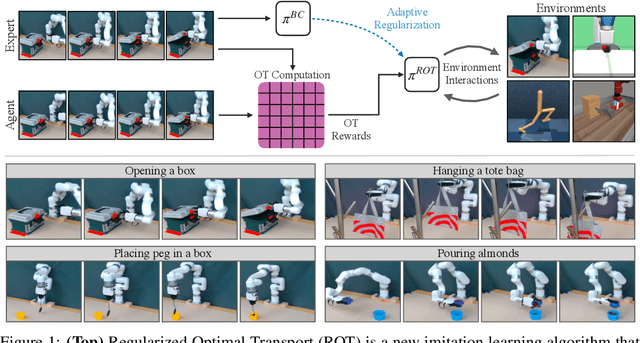
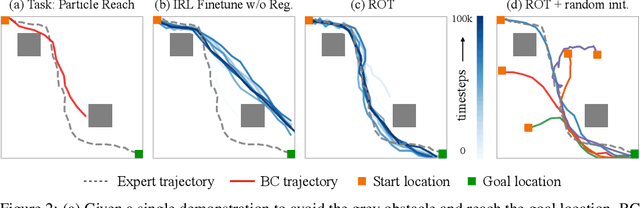
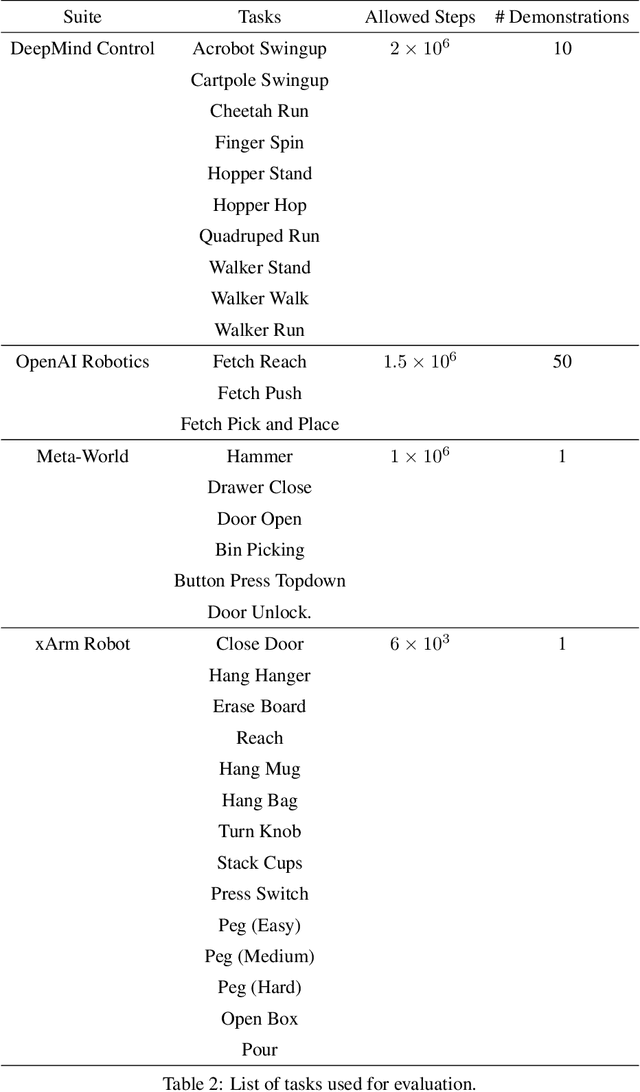
Imitation learning holds tremendous promise in learning policies efficiently for complex decision making problems. Current state-of-the-art algorithms often use inverse reinforcement learning (IRL), where given a set of expert demonstrations, an agent alternatively infers a reward function and the associated optimal policy. However, such IRL approaches often require substantial online interactions for complex control problems. In this work, we present Regularized Optimal Transport (ROT), a new imitation learning algorithm that builds on recent advances in optimal transport based trajectory-matching. Our key technical insight is that adaptively combining trajectory-matching rewards with behavior cloning can significantly accelerate imitation even with only a few demonstrations. Our experiments on 20 visual control tasks across the DeepMind Control Suite, the OpenAI Robotics Suite, and the Meta-World Benchmark demonstrate an average of 7.8X faster imitation to reach 90% of expert performance compared to prior state-of-the-art methods. On real-world robotic manipulation, with just one demonstration and an hour of online training, ROT achieves an average success rate of 90.1% across 14 tasks.