 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeReal-is-Sim: Bridging the Sim-to-Real Gap with a Dynamic Digital Twin for Real-World Robot Policy Evaluation
Apr 04, 2025Recent advancements in behavior cloning have enabled robots to perform complex manipulation tasks. However, accurately assessing training performance remains challenging, particularly for real-world applications, as behavior cloning losses often correlate poorly with actual task success. Consequently, researchers resort to success rate metrics derived from costly and time-consuming real-world evaluations, making the identification of optimal policies and detection of overfitting or underfitting impractical. To address these issues, we propose real-is-sim, a novel behavior cloning framework that incorporates a dynamic digital twin (based on Embodied Gaussians) throughout the entire policy development pipeline: data collection, training, and deployment. By continuously aligning the simulated world with the physical world, demonstrations can be collected in the real world with states extracted from the simulator. The simulator enables flexible state representations by rendering image inputs from any viewpoint or extracting low-level state information from objects embodied within the scene. During training, policies can be directly evaluated within the simulator in an offline and highly parallelizable manner. Finally, during deployment, policies are run within the simulator where the real robot directly tracks the simulated robot's joints, effectively decoupling policy execution from real hardware and mitigating traditional domain-transfer challenges. We validate real-is-sim on the PushT manipulation task, demonstrating strong correlation between success rates obtained in the simulator and real-world evaluations. Videos of our system can be found at https://realissim.rai-inst.com.
IMLE Policy: Fast and Sample Efficient Visuomotor Policy Learning via Implicit Maximum Likelihood Estimation
Feb 17, 2025



Recent advances in imitation learning, particularly using generative modelling techniques like diffusion, have enabled policies to capture complex multi-modal action distributions. However, these methods often require large datasets and multiple inference steps for action generation, posing challenges in robotics where the cost for data collection is high and computation resources are limited. To address this, we introduce IMLE Policy, a novel behaviour cloning approach based on Implicit Maximum Likelihood Estimation (IMLE). IMLE Policy excels in low-data regimes, effectively learning from minimal demonstrations and requiring 38\% less data on average to match the performance of baseline methods in learning complex multi-modal behaviours. Its simple generator-based architecture enables single-step action generation, improving inference speed by 97.3\% compared to Diffusion Policy, while outperforming single-step Flow Matching. We validate our approach across diverse manipulation tasks in simulated and real-world environments, showcasing its ability to capture complex behaviours under data constraints. Videos and code are provided on our project page: https://imle-policy.github.io/.
Multi-Modal 3D Scene Graph Updater for Shared and Dynamic Environments
Nov 05, 2024

The advent of generalist Large Language Models (LLMs) and Large Vision Models (VLMs) have streamlined the construction of semantically enriched maps that can enable robots to ground high-level reasoning and planning into their representations. One of the most widely used semantic map formats is the 3D Scene Graph, which captures both metric (low-level) and semantic (high-level) information. However, these maps often assume a static world, while real environments, like homes and offices, are dynamic. Even small changes in these spaces can significantly impact task performance. To integrate robots into dynamic environments, they must detect changes and update the scene graph in real-time. This update process is inherently multimodal, requiring input from various sources, such as human agents, the robot's own perception system, time, and its actions. This work proposes a framework that leverages these multimodal inputs to maintain the consistency of scene graphs during real-time operation, presenting promising initial results and outlining a roadmap for future research.
Affordance-Centric Policy Learning: Sample Efficient and Generalisable Robot Policy Learning using Affordance-Centric Task Frames
Oct 15, 2024



Affordances are central to robotic manipulation, where most tasks can be simplified to interactions with task-specific regions on objects. By focusing on these key regions, we can abstract away task-irrelevant information, simplifying the learning process, and enhancing generalisation. In this paper, we propose an affordance-centric policy-learning approach that centres and appropriately \textit{orients} a \textit{task frame} on these affordance regions allowing us to achieve both \textbf{intra-category invariance} -- where policies can generalise across different instances within the same object category -- and \textbf{spatial invariance} -- which enables consistent performance regardless of object placement in the environment. We propose a method to leverage existing generalist large vision models to extract and track these affordance frames, and demonstrate that our approach can learn manipulation tasks using behaviour cloning from as little as 10 demonstrations, with equivalent generalisation to an image-based policy trained on 305 demonstrations. We provide video demonstrations on our project site: https://affordance-policy.github.io.
Physically Embodied Gaussian Splatting: A Realtime Correctable World Model for Robotics
Jun 16, 2024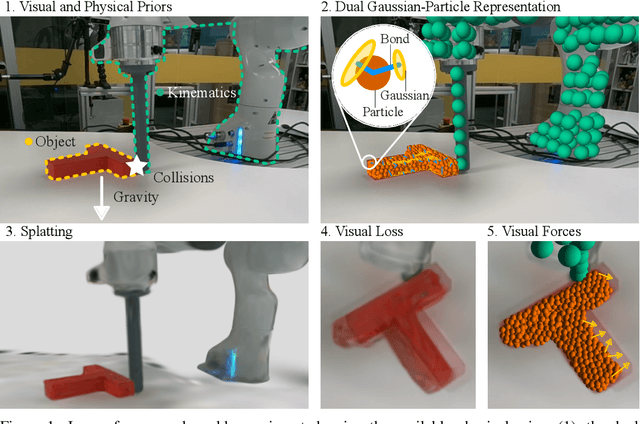
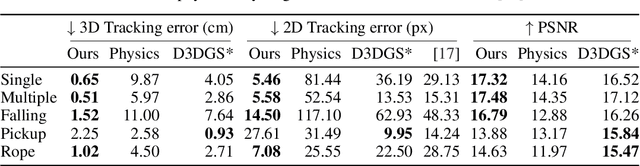


For robots to robustly understand and interact with the physical world, it is highly beneficial to have a comprehensive representation - modelling geometry, physics, and visual observations - that informs perception, planning, and control algorithms. We propose a novel dual Gaussian-Particle representation that models the physical world while (i) enabling predictive simulation of future states and (ii) allowing online correction from visual observations in a dynamic world. Our representation comprises particles that capture the geometrical aspect of objects in the world and can be used alongside a particle-based physics system to anticipate physically plausible future states. Attached to these particles are 3D Gaussians that render images from any viewpoint through a splatting process thus capturing the visual state. By comparing the predicted and observed images, our approach generates visual forces that correct the particle positions while respecting known physical constraints. By integrating predictive physical modelling with continuous visually-derived corrections, our unified representation reasons about the present and future while synchronizing with reality. Our system runs in realtime at 30Hz using only 3 cameras. We validate our approach on 2D and 3D tracking tasks as well as photometric reconstruction quality. Videos are found at https://embodied-gaussians.github.io/.
RoboHop: Segment-based Topological Map Representation for Open-World Visual Navigation
May 09, 2024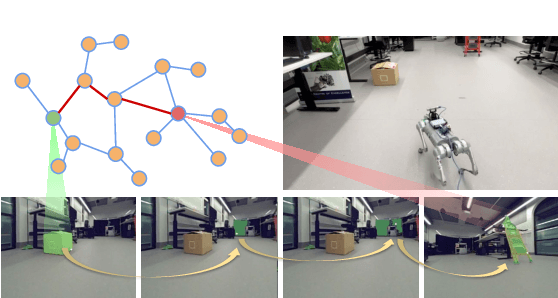
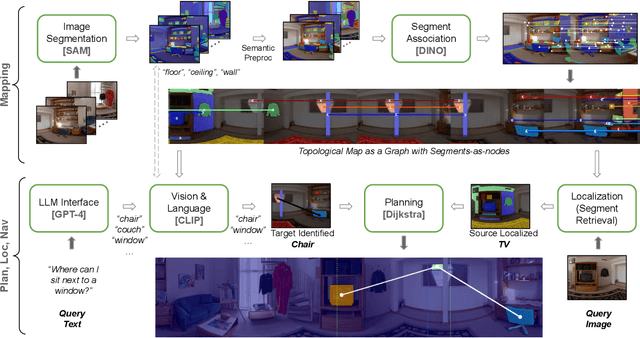
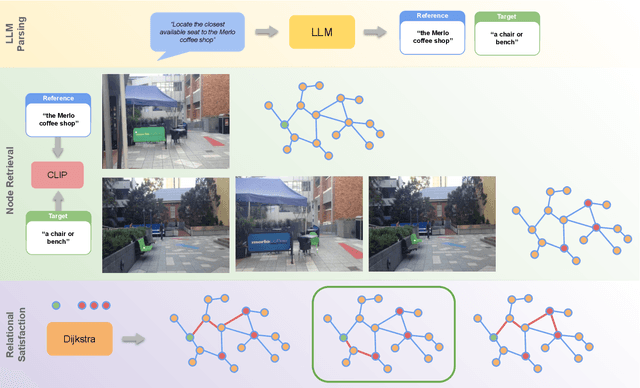

Mapping is crucial for spatial reasoning, planning and robot navigation. Existing approaches range from metric, which require precise geometry-based optimization, to purely topological, where image-as-node based graphs lack explicit object-level reasoning and interconnectivity. In this paper, we propose a novel topological representation of an environment based on "image segments", which are semantically meaningful and open-vocabulary queryable, conferring several advantages over previous works based on pixel-level features. Unlike 3D scene graphs, we create a purely topological graph with segments as nodes, where edges are formed by a) associating segment-level descriptors between pairs of consecutive images and b) connecting neighboring segments within an image using their pixel centroids. This unveils a "continuous sense of a place", defined by inter-image persistence of segments along with their intra-image neighbours. It further enables us to represent and update segment-level descriptors through neighborhood aggregation using graph convolution layers, which improves robot localization based on segment-level retrieval. Using real-world data, we show how our proposed map representation can be used to i) generate navigation plans in the form of "hops over segments" and ii) search for target objects using natural language queries describing spatial relations of objects. Furthermore, we quantitatively analyze data association at the segment level, which underpins inter-image connectivity during mapping and segment-level localization when revisiting the same place. Finally, we show preliminary trials on segment-level `hopping' based zero-shot real-world navigation. Project page with supplementary details: oravus.github.io/RoboHop/
LHManip: A Dataset for Long-Horizon Language-Grounded Manipulation Tasks in Cluttered Tabletop Environments
Dec 20, 2023



Instructing a robot to complete an everyday task within our homes has been a long-standing challenge for robotics. While recent progress in language-conditioned imitation learning and offline reinforcement learning has demonstrated impressive performance across a wide range of tasks, they are typically limited to short-horizon tasks -- not reflective of those a home robot would be expected to complete. While existing architectures have the potential to learn these desired behaviours, the lack of the necessary long-horizon, multi-step datasets for real robotic systems poses a significant challenge. To this end, we present the Long-Horizon Manipulation (LHManip) dataset comprising 200 episodes, demonstrating 20 different manipulation tasks via real robot teleoperation. The tasks entail multiple sub-tasks, including grasping, pushing, stacking and throwing objects in highly cluttered environments. Each task is paired with a natural language instruction and multi-camera viewpoints for point-cloud or NeRF reconstruction. In total, the dataset comprises 176,278 observation-action pairs which form part of the Open X-Embodiment dataset. The full LHManip dataset is made publicly available at https://github.com/fedeceola/LHManip.
Open X-Embodiment: Robotic Learning Datasets and RT-X Models
Oct 17, 2023



Large, high-capacity models trained on diverse datasets have shown remarkable successes on efficiently tackling downstream applications. In domains from NLP to Computer Vision, this has led to a consolidation of pretrained models, with general pretrained backbones serving as a starting point for many applications. Can such a consolidation happen in robotics? Conventionally, robotic learning methods train a separate model for every application, every robot, and even every environment. Can we instead train generalist X-robot policy that can be adapted efficiently to new robots, tasks, and environments? In this paper, we provide datasets in standardized data formats and models to make it possible to explore this possibility in the context of robotic manipulation, alongside experimental results that provide an example of effective X-robot policies. We assemble a dataset from 22 different robots collected through a collaboration between 21 institutions, demonstrating 527 skills (160266 tasks). We show that a high-capacity model trained on this data, which we call RT-X, exhibits positive transfer and improves the capabilities of multiple robots by leveraging experience from other platforms. More details can be found on the project website $\href{https://robotics-transformer-x.github.io}{\text{robotics-transformer-x.github.io}}$.
SayPlan: Grounding Large Language Models using 3D Scene Graphs for Scalable Task Planning
Jul 12, 2023



Large language models (LLMs) have demonstrated impressive results in developing generalist planning agents for diverse tasks. However, grounding these plans in expansive, multi-floor, and multi-room environments presents a significant challenge for robotics. We introduce SayPlan, a scalable approach to LLM-based, large-scale task planning for robotics using 3D scene graph (3DSG) representations. To ensure the scalability of our approach, we: (1) exploit the hierarchical nature of 3DSGs to allow LLMs to conduct a semantic search for task-relevant subgraphs from a smaller, collapsed representation of the full graph; (2) reduce the planning horizon for the LLM by integrating a classical path planner and (3) introduce an iterative replanning pipeline that refines the initial plan using feedback from a scene graph simulator, correcting infeasible actions and avoiding planning failures. We evaluate our approach on two large-scale environments spanning up to 3 floors, 36 rooms and 140 objects, and show that our approach is capable of grounding large-scale, long-horizon task plans from abstract, and natural language instruction for a mobile manipulator robot to execute.
Contrastive Language, Action, and State Pre-training for Robot Learning
Apr 21, 2023In this paper, we introduce a method for unifying language, action, and state information in a shared embedding space to facilitate a range of downstream tasks in robot learning. Our method, Contrastive Language, Action, and State Pre-training (CLASP), extends the CLIP formulation by incorporating distributional learning, capturing the inherent complexities and one-to-many relationships in behaviour-text alignment. By employing distributional outputs for both text and behaviour encoders, our model effectively associates diverse textual commands with a single behaviour and vice-versa. We demonstrate the utility of our method for the following downstream tasks: zero-shot text-behaviour retrieval, captioning unseen robot behaviours, and learning a behaviour prior for language-conditioned reinforcement learning. Our distributional encoders exhibit superior retrieval and captioning performance on unseen datasets, and the ability to generate meaningful exploratory behaviours from textual commands, capturing the intricate relationships between language, action, and state. This work represents an initial step towards developing a unified pre-trained model for robotics, with the potential to generalise to a broad range of downstream tasks.