 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeMeta-Reinforcement Learning for Robotic Industrial Insertion Tasks
May 23, 2020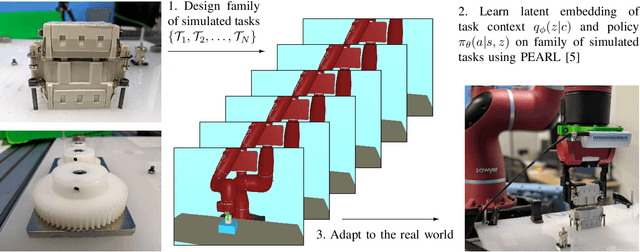
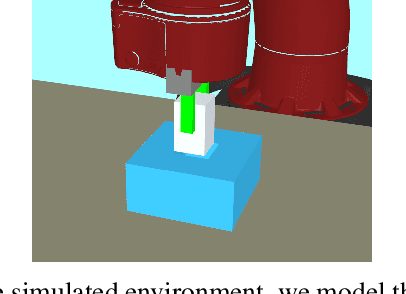
Robotic insertion tasks are characterized by contact and friction mechanics, making them challenging for conventional feedback control methods due to unmodeled physical effects. Reinforcement learning (RL) is a promising approach for learning control policies in such settings. However, RL can be unsafe during exploration and might require a large amount of real-world training data, which is expensive to collect. In this paper, we study how to use meta-reinforcement learning to solve the bulk of the problem in simulation by solving a family of simulated industrial insertion tasks and then adapt policies quickly in the real world. We demonstrate our approach by training an agent to successfully perform challenging real-world insertion tasks using less than 20 trials of real-world experience. Videos and other material are available at https://pearl-insertion.github.io/
Information-Collection in Robotic Process Monitoring: An Active Perception Approach
May 01, 2020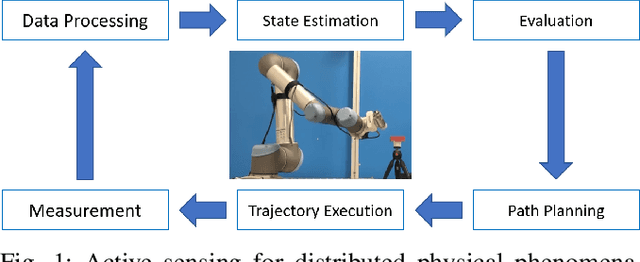
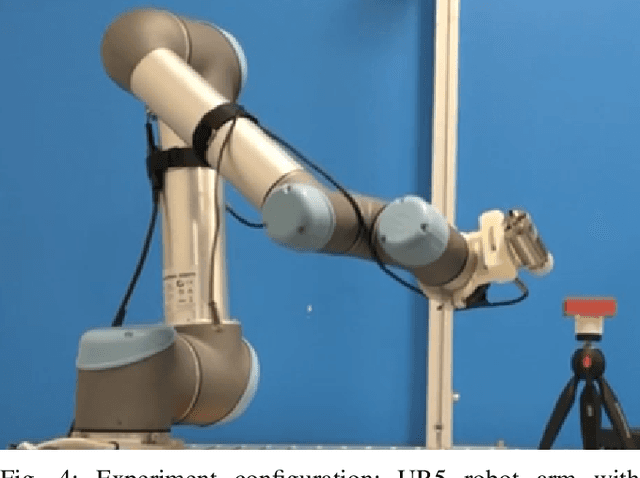
Active perception systems maximizing information gain to support both monitoring and decision making have seen considerable application in recent work. In this paper, we propose and demonstrate a method of acquiring and extrapolating information in an active sensory system through use of a Bayesian Filter. Our approach is motivated by manufacturing processes, where automated visual tracking of system states may aid in fault diagnosis, certification of parts and safety; in extreme cases, our approach may enable novel manufacturing processes relying on monitoring solutions beyond passive perception. We demonstrate how using a Bayesian Filter in active perception scenarios permits reasoning about future actions based on measured as well as unmeasured but propagated state elements, thereby increasing substantially the quality of information available to decision making algorithms used in control of overarching processes. We demonstrate use of our active perception system in physical experiments, where we use a time-varying Kalman Filter to resolve uncertainty for a representative system capturing in additive manufacturing.
UniGrasp: Learning a Unified Model to Grasp with N-Fingered Robotic Hands
Oct 24, 2019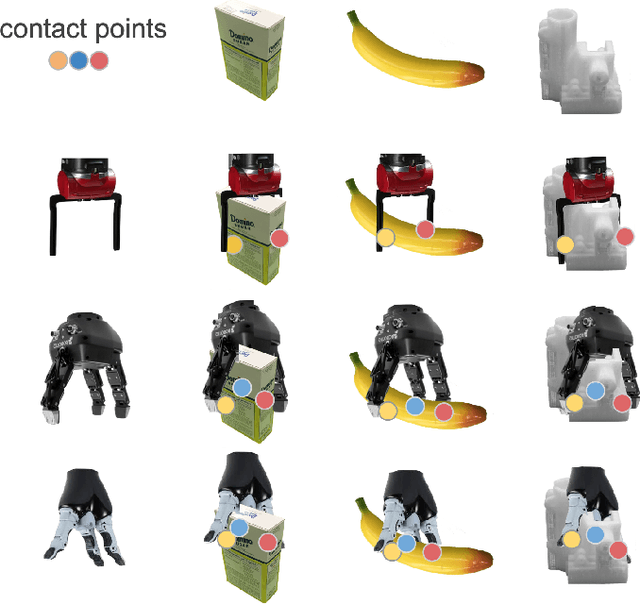
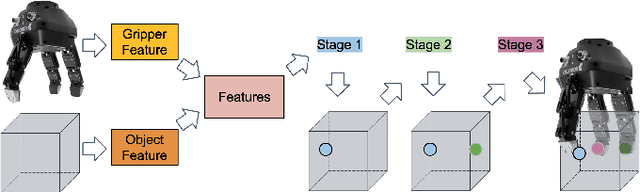
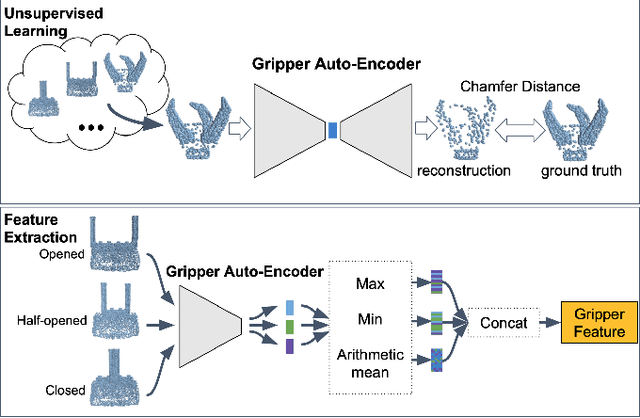
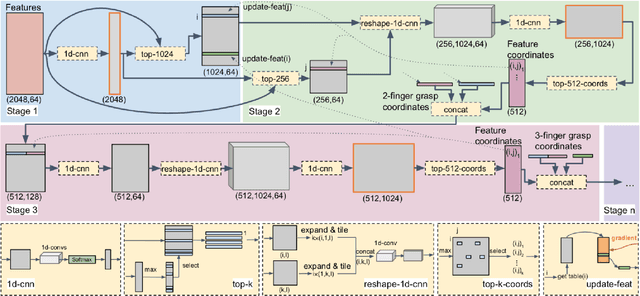
To achieve a successful grasp, gripper attributes including geometry and kinematics play a role equally important to the target object geometry. The majority of previous work has focused on developing grasp methods that generalize over novel object geometry but are specific to a certain robot hand. We propose UniGrasp, an efficient data-driven grasp synthesis method that considers both the object geometry and gripper attributes as inputs. UniGrasp is based on a novel deep neural network architecture that selects sets of contact points from the input point cloud of the object. The proposed model is trained on a large dataset to produce contact points that are in force closure and reachable by the robot hand. By using contact points as output, we can transfer between a diverse set of N-fingered robotic hands. Our model produces over 90 percent valid contact points in Top10 predictions in simulation and more than 90 percent successful grasps in the real world experiments for various known two-fingered and three-fingered grippers. Our model also achieves 93 percent and 83 percent successful grasps in the real world experiments for a novel two-fingered and five-fingered anthropomorphic robotic hand, respectively.
Deep Reinforcement Learning for Industrial Insertion Tasks with Visual Inputs and Natural Rewards
Jun 13, 2019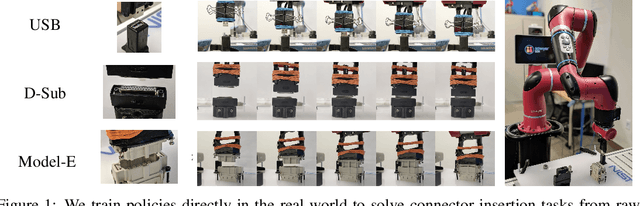
Connector insertion and many other tasks commonly found in modern manufacturing settings involve complex contact dynamics and friction. Since it is difficult to capture related physical effects with first-order modeling, traditional control methods often result in brittle and inaccurate controllers, which have to be manually tuned. Reinforcement learning (RL) methods have been demonstrated to be capable of learning controllers in such environments from autonomous interaction with the environment, but running RL algorithms in the real world poses sample efficiency and safety challenges. Moreover, in practical real-world settings we cannot assume access to perfect state information or dense reward signals. In this paper, we consider a variety of difficult industrial insertion tasks with visual inputs and different natural reward specifications, namely sparse rewards and goal images. We show that methods that combine RL with prior information, such as classical controllers or demonstrations, can solve these tasks from a reasonable amount of real-world interaction.
Reinforcement Learning on Variable Impedance Controller for High-Precision Robotic Assembly
Mar 20, 2019

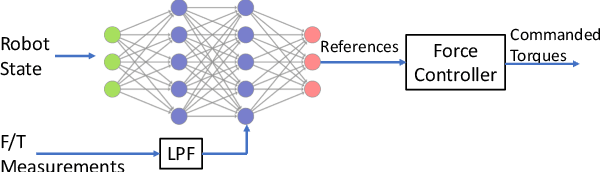
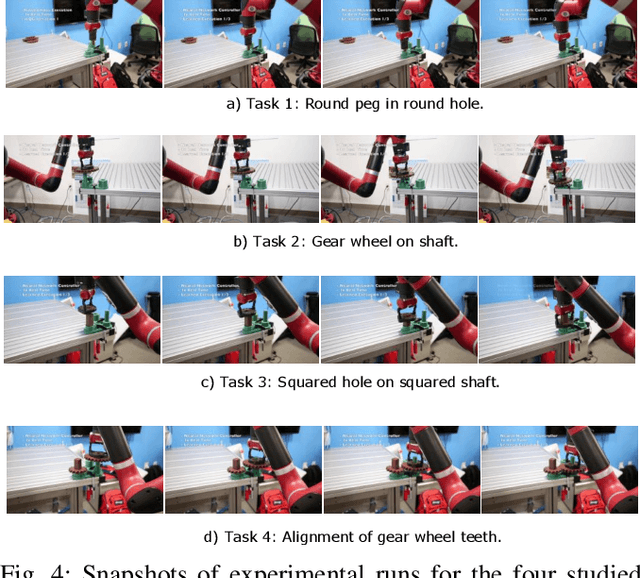
Precise robotic manipulation skills are desirable in many industrial settings, reinforcement learning (RL) methods hold the promise of acquiring these skills autonomously. In this paper, we explicitly consider incorporating operational space force/torque information into reinforcement learning; this is motivated by humans heuristically mapping perceived forces to control actions, which results in completing high-precision tasks in a fairly easy manner. Our approach combines RL with force/torque information by incorporating a proper operational space force controller; where we also exploit different ablations on processing this information. Moreover, we propose a neural network architecture that generalizes to reasonable variations of the environment. We evaluate our method on the open-source Siemens Robot Learning Challenge, which requires precise and delicate force-controlled behavior to assemble a tight-fit gear wheel set.
Domain Randomization for Active Pose Estimation
Mar 10, 2019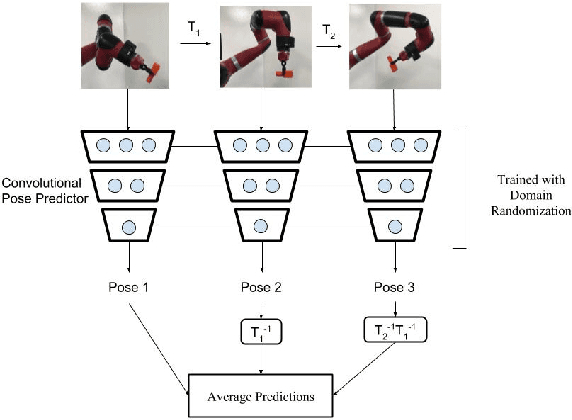

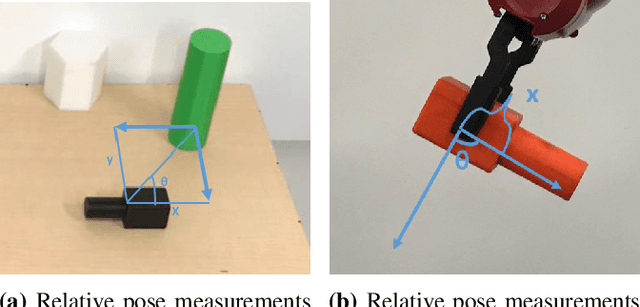

Accurate state estimation is a fundamental component of robotic control. In robotic manipulation tasks, as is our focus in this work, state estimation is essential for identifying the positions of objects in the scene, forming the basis of the manipulation plan. However, pose estimation typically requires expensive 3D cameras or additional instrumentation such as fiducial markers to perform accurately. Recently, Tobin et al.~introduced an approach to pose estimation based on domain randomization, where a neural network is trained to predict pose directly from a 2D image of the scene. The network is trained on computer-generated images with a high variation in textures and lighting, thereby generalizing to real-world images. In this work, we investigate how to improve the accuracy of domain randomization based pose estimation. Our main idea is that active perception -- moving the robot to get a better estimate of pose -- can be trained in simulation and transferred to real using domain randomization. In our approach, the robot trains in a domain-randomized simulation how to estimate pose from a \emph{sequence} of images. We show that our approach can significantly improve the accuracy of standard pose estimation in several scenarios: when the robot holding an object moves, when reference objects are moved in the scene, or when the camera is moved around the object.
Residual Reinforcement Learning for Robot Control
Dec 18, 2018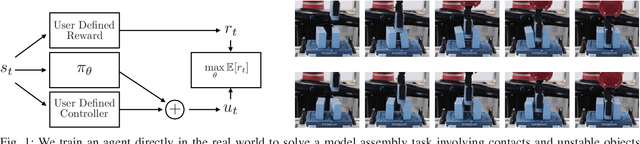

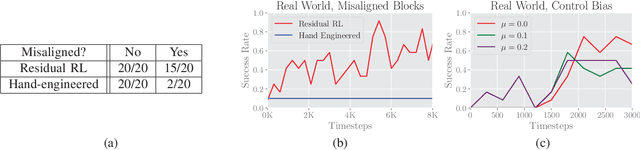
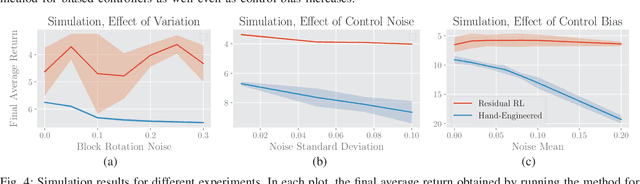
Conventional feedback control methods can solve various types of robot control problems very efficiently by capturing the structure with explicit models, such as rigid body equations of motion. However, many control problems in modern manufacturing deal with contacts and friction, which are difficult to capture with first-order physical modeling. Hence, applying control design methodologies to these kinds of problems often results in brittle and inaccurate controllers, which have to be manually tuned for deployment. Reinforcement learning (RL) methods have been demonstrated to be capable of learning continuous robot controllers from interactions with the environment, even for problems that include friction and contacts. In this paper, we study how we can solve difficult control problems in the real world by decomposing them into a part that is solved efficiently by conventional feedback control methods, and the residual which is solved with RL. The final control policy is a superposition of both control signals. We demonstrate our approach by training an agent to successfully perform a real-world block assembly task involving contacts and unstable objects.
Learning Robotic Assembly from CAD
Jul 24, 2018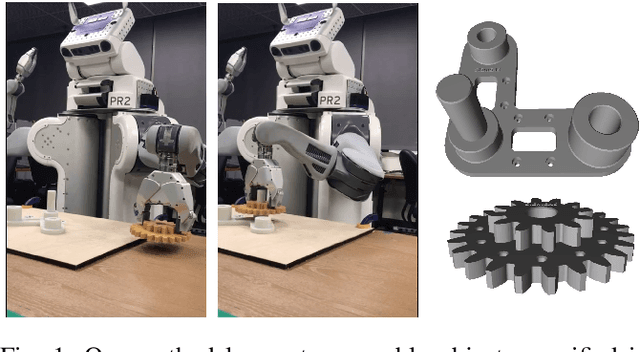
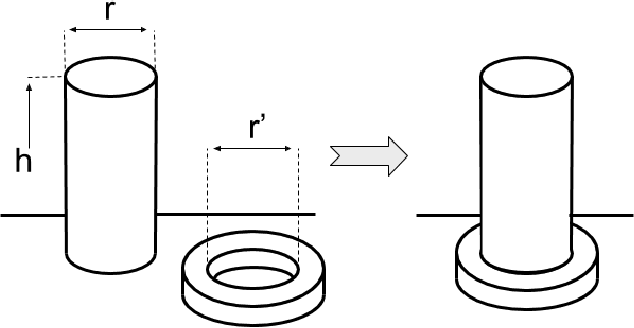
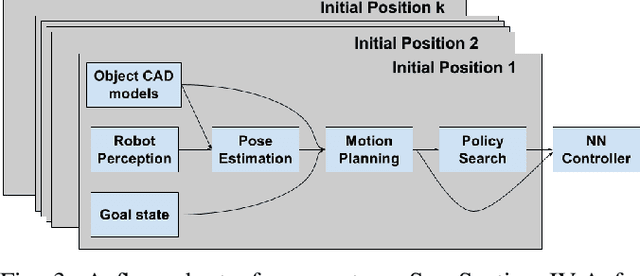
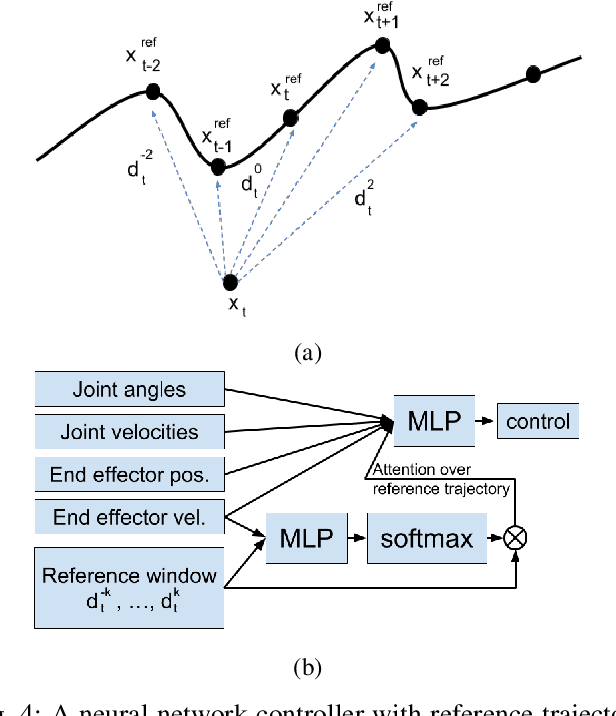
In this work, motivated by recent manufacturing trends, we investigate autonomous robotic assembly. Industrial assembly tasks require contact-rich manipulation skills, which are challenging to acquire using classical control and motion planning approaches. Consequently, robot controllers for assembly domains are presently engineered to solve a particular task, and cannot easily handle variations in the product or environment. Reinforcement learning (RL) is a promising approach for autonomously acquiring robot skills that involve contact-rich dynamics. However, RL relies on random exploration for learning a control policy, which requires many robot executions, and often gets trapped in locally suboptimal solutions. Instead, we posit that prior knowledge, when available, can improve RL performance. We exploit the fact that in modern assembly domains, geometric information about the task is readily available via the CAD design files. We propose to leverage this prior knowledge by guiding RL along a geometric motion plan, calculated using the CAD data. We show that our approach effectively improves over traditional control approaches for tracking the motion plan, and can solve assembly tasks that require high precision, even without accurate state estimation. In addition, we propose a neural network architecture that can learn to track the motion plan, and generalize the assembly controller to changes in the object positions.
Dex-Net 2.0: Deep Learning to Plan Robust Grasps with Synthetic Point Clouds and Analytic Grasp Metrics
Aug 08, 2017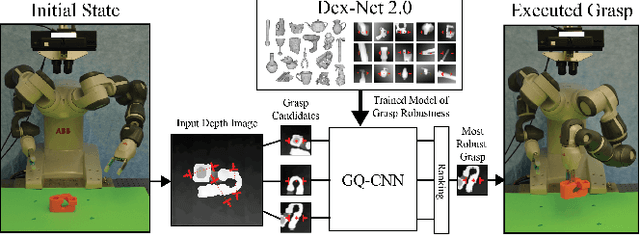
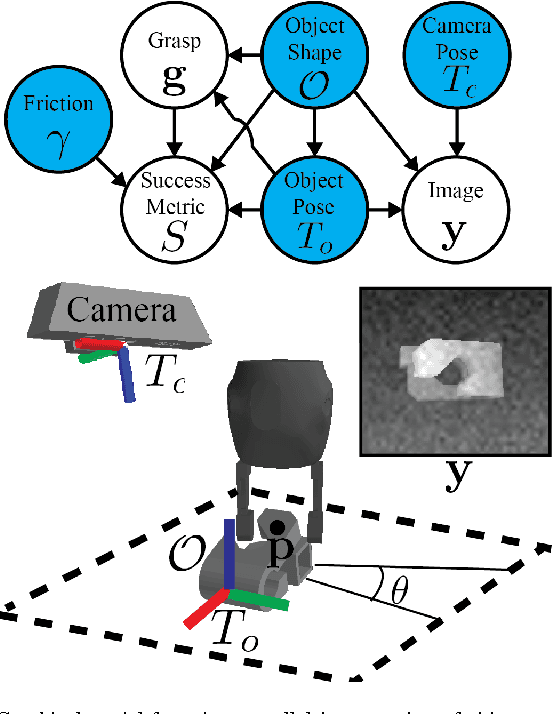
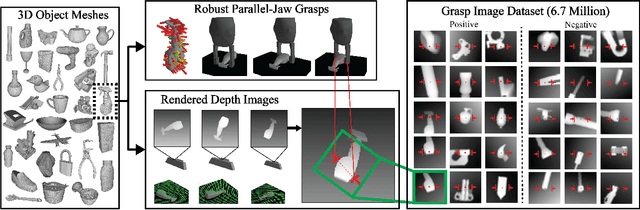
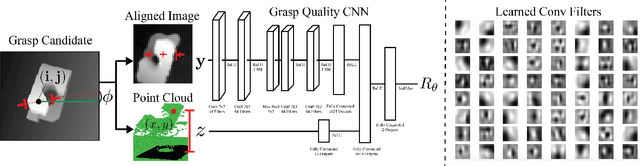
To reduce data collection time for deep learning of robust robotic grasp plans, we explore training from a synthetic dataset of 6.7 million point clouds, grasps, and analytic grasp metrics generated from thousands of 3D models from Dex-Net 1.0 in randomized poses on a table. We use the resulting dataset, Dex-Net 2.0, to train a Grasp Quality Convolutional Neural Network (GQ-CNN) model that rapidly predicts the probability of success of grasps from depth images, where grasps are specified as the planar position, angle, and depth of a gripper relative to an RGB-D sensor. Experiments with over 1,000 trials on an ABB YuMi comparing grasp planning methods on singulated objects suggest that a GQ-CNN trained with only synthetic data from Dex-Net 2.0 can be used to plan grasps in 0.8sec with a success rate of 93% on eight known objects with adversarial geometry and is 3x faster than registering point clouds to a precomputed dataset of objects and indexing grasps. The Dex-Net 2.0 grasp planner also has the highest success rate on a dataset of 10 novel rigid objects and achieves 99% precision (one false positive out of 69 grasps classified as robust) on a dataset of 40 novel household objects, some of which are articulated or deformable. Code, datasets, videos, and supplementary material are available at http://berkeleyautomation.github.io/dex-net .