 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeOptimizing Multi-Touch Textile and Tactile Skin Sensing Through Circuit Parameter Estimation
Apr 23, 2024



Tactile and textile skin technologies have become increasingly important for enhancing human-robot interaction and allowing robots to adapt to different environments. Despite notable advancements, there are ongoing challenges in skin signal processing, particularly in achieving both accuracy and speed in dynamic touch sensing. This paper introduces a new framework that poses the touch sensing problem as an estimation problem of resistive sensory arrays. Utilizing a Regularized Least Squares objective function which estimates the resistance distribution of the skin. We enhance the touch sensing accuracy and mitigate the ghosting effects, where false or misleading touches may be registered. Furthermore, our study presents a streamlined skin design that simplifies manufacturing processes without sacrificing performance. Experimental outcomes substantiate the effectiveness of our method, showing 26.9% improvement in multi-touch force-sensing accuracy for the tactile skin.
Robotic Defect Inspection with Visual and Tactile Perception for Large-scale Components
Sep 08, 2023



In manufacturing processes, surface inspection is a key requirement for quality assessment and damage localization. Due to this, automated surface anomaly detection has become a promising area of research in various industrial inspection systems. A particular challenge in industries with large-scale components, like aircraft and heavy machinery, is inspecting large parts with very small defect dimensions. Moreover, these parts can be of curved shapes. To address this challenge, we present a 2-stage multi-modal inspection pipeline with visual and tactile sensing. Our approach combines the best of both visual and tactile sensing by identifying and localizing defects using a global view (vision) and using the localized area for tactile scanning for identifying remaining defects. To benchmark our approach, we propose a novel real-world dataset with multiple metallic defect types per image, collected in the production environments on real aerospace manufacturing parts, as well as online robot experiments in two environments. Our approach is able to identify 85% defects using Stage I and identify 100% defects after Stage II. The dataset is publicly available at https://zenodo.org/record/8327713
Contact-Rich Trajectory Generation in Confined Environments Using Iterative Convex Optimization
Aug 09, 2020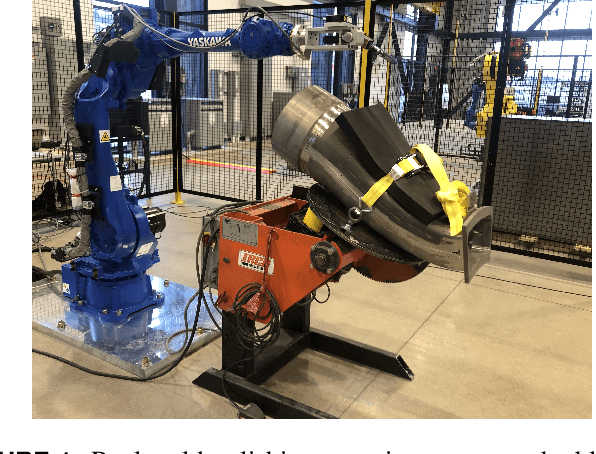
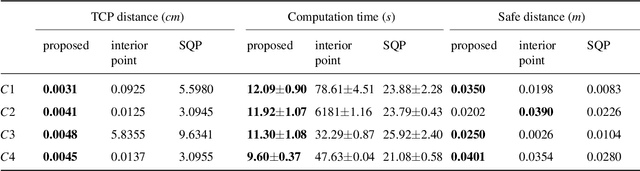
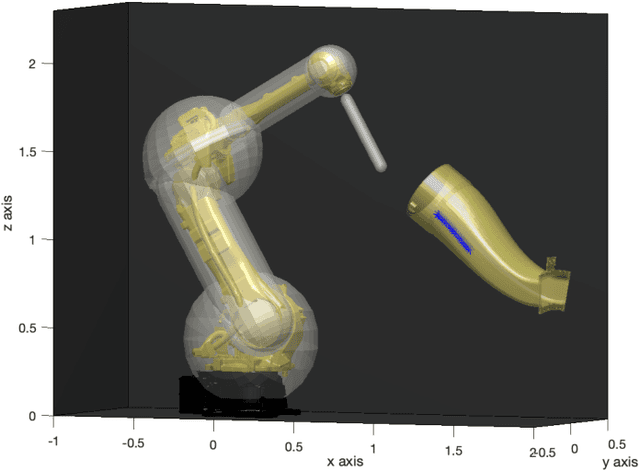

Applying intelligent robot arms in dynamic uncertain environments (i.e., flexible production lines) remains challenging, which requires efficient algorithms for real time trajectory generation. The motion planning problem for robot trajectory generation is highly nonlinear and nonconvex, which usually comes with collision avoidance constraints, robot kinematics and dynamics constraints, and task constraints (e.g., following a Cartesian trajectory defined on a surface and maintain the contact). The nonlinear and nonconvex planning problem is computationally expensive to solve, which limits the application of robot arms in the real world. In this paper, for redundant robot arm planning problems with complex constraints, we present a motion planning method using iterative convex optimization that can efficiently handle the constraints and generate optimal trajectories in real time. The proposed planner guarantees the satisfaction of the contact-rich task constraints and avoids collision in confined environments. Extensive experiments on trajectory generation for weld grinding are performed to demonstrate the effectiveness of the proposed method and its applicability in advanced robotic manufacturing.
Neural Subgraph Matching
Jul 06, 2020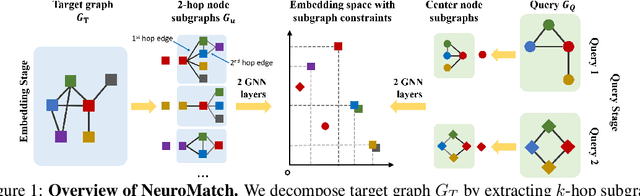
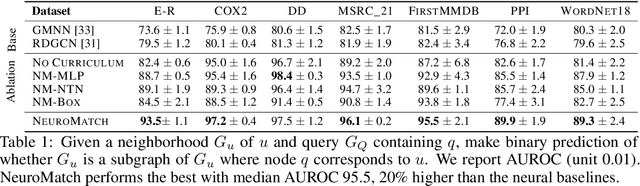
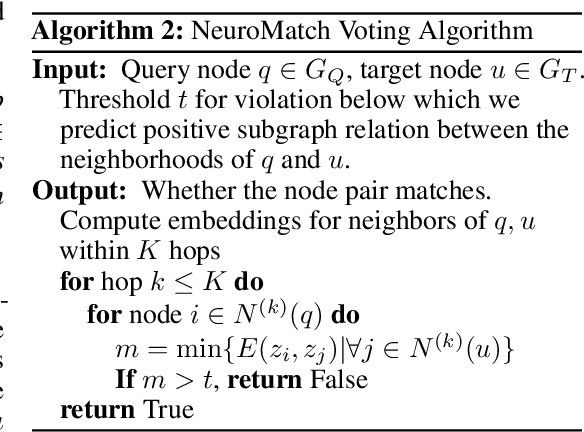
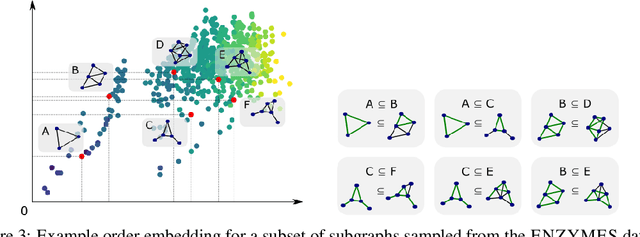
Subgraph matching is the problem of determining the presence and location(s) of a given query graph in a large target graph. Despite being an NP-complete problem, the subgraph matching problem is crucial in domains ranging from network science and database systems to biochemistry and cognitive science. However, existing techniques based on combinatorial matching and integer programming cannot handle matching problems with both large target and query graphs. Here we propose NeuroMatch, an accurate, efficient, and robust neural approach to subgraph matching. NeuroMatch decomposes query and target graphs into small subgraphs and embeds them using graph neural networks. Trained to capture geometric constraints corresponding to subgraph relations, NeuroMatch then efficiently performs subgraph matching directly in the embedding space. Experiments demonstrate NeuroMatch is 100x faster than existing combinatorial approaches and 18% more accurate than existing approximate subgraph matching methods.
LFZip: Lossy compression of multivariate floating-point time series data via improved prediction
Nov 01, 2019
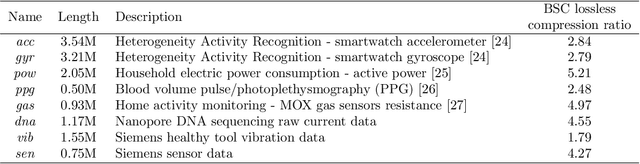
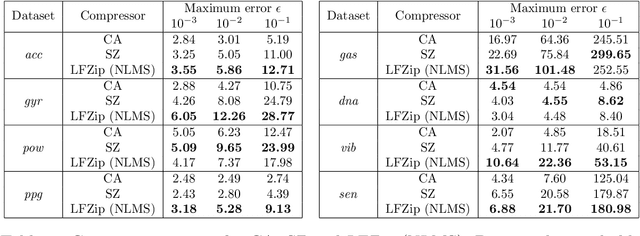
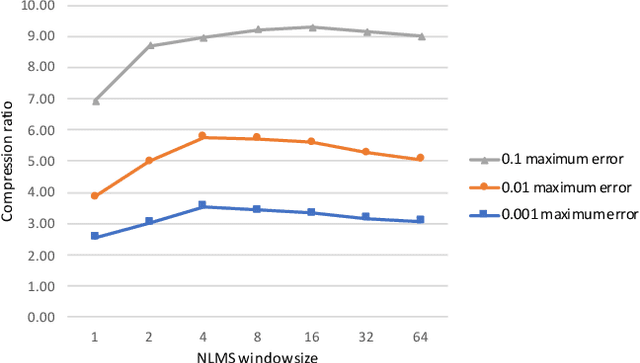
Time series data compression is emerging as an important problem with the growth in IoT devices and sensors. Due to the presence of noise in these datasets, lossy compression can often provide significant compression gains without impacting the performance of downstream applications. In this work, we propose an error-bounded lossy compressor, LFZip, for multivariate floating-point time series data that provides guaranteed reconstruction up to user-specified maximum absolute error. The compressor is based on the prediction-quantization-entropy coder framework and benefits from improved prediction using linear models and neural networks. We evaluate the compressor on several time series datasets where it outperforms the existing state-of-the-art error-bounded lossy compressors. The code and data are available at https://github.com/shubhamchandak94/LFZip
Reinforcement Learning on Variable Impedance Controller for High-Precision Robotic Assembly
Mar 20, 2019

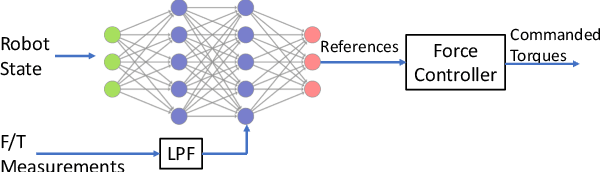
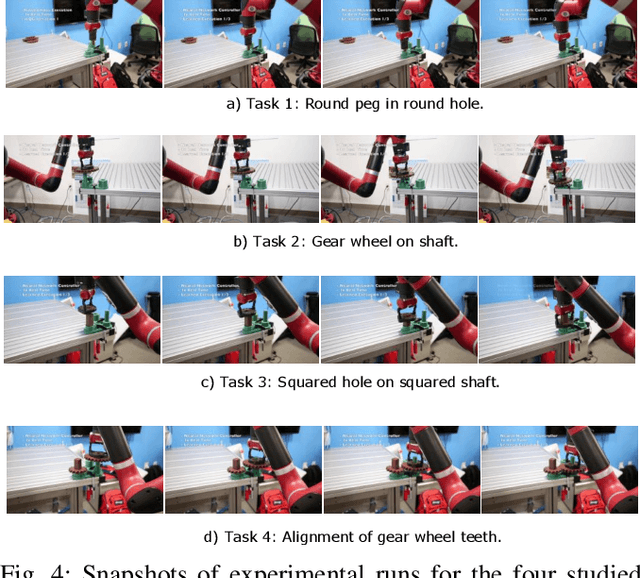
Precise robotic manipulation skills are desirable in many industrial settings, reinforcement learning (RL) methods hold the promise of acquiring these skills autonomously. In this paper, we explicitly consider incorporating operational space force/torque information into reinforcement learning; this is motivated by humans heuristically mapping perceived forces to control actions, which results in completing high-precision tasks in a fairly easy manner. Our approach combines RL with force/torque information by incorporating a proper operational space force controller; where we also exploit different ablations on processing this information. Moreover, we propose a neural network architecture that generalizes to reasonable variations of the environment. We evaluate our method on the open-source Siemens Robot Learning Challenge, which requires precise and delicate force-controlled behavior to assemble a tight-fit gear wheel set.