 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeForce-Sensing Tensegrity for Investigating Physical Human-Robot Interaction in Compliant Robotic Systems
Jun 15, 2021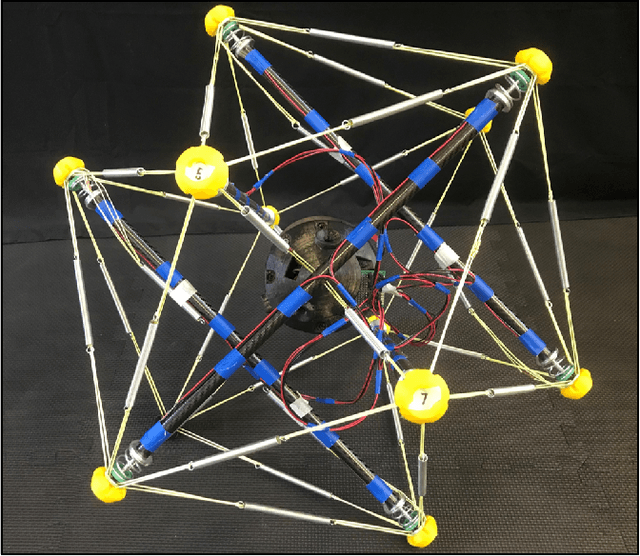
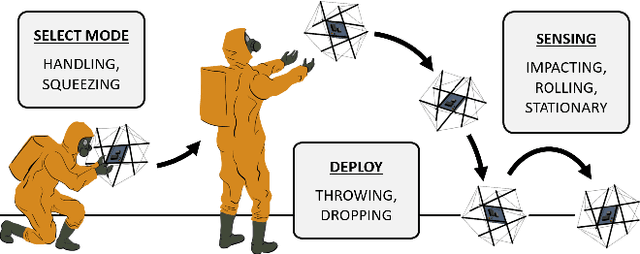
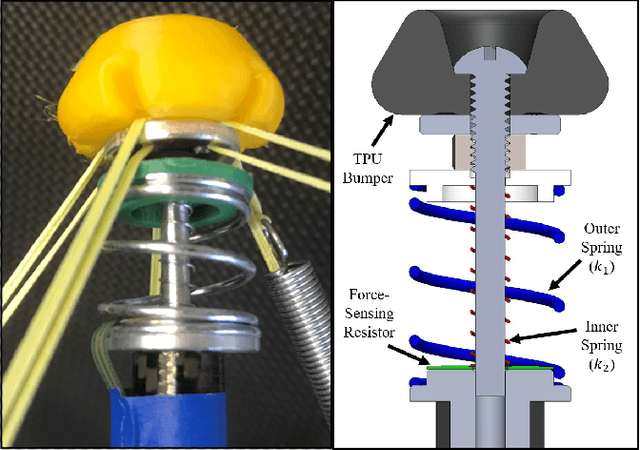
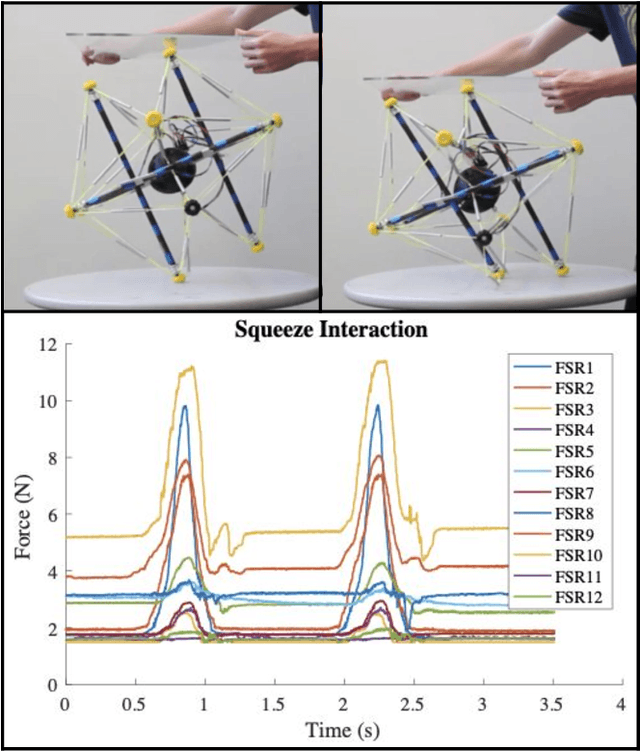
Advancements in the domain of physical human-robot interaction (pHRI) have tremendously improved the ability of humans and robots to communicate, collaborate, and coexist. In particular, compliant robotic systems offer many characteristics that can be leveraged towards enabling physical interactions that more efficiently and intuitively communicate intent, making compliant systems potentially useful in more physically demanding subsets of human-robot collaborative scenarios. Tensegrity robots are an example of compliant systems that are well-suited to physical interactions while still retaining useful rigid properties that make them practical for a variety of applications. In this paper, we present the design and preliminary testing of a 6-bar spherical tensegrity with force-sensing capabilities. Using this prototype, we demonstrate the ability of its force-sensor array to detect a variety of physical interaction types that might arise in a human context. We then train and test a series of classifiers using data from unique and representative interactions in order to demonstrate the feasibility of using this physical modality of sensing to reliably communicate goals and intents from a human operator in a human-robot collaborative setting.
Reinforcement Learning on Variable Impedance Controller for High-Precision Robotic Assembly
Mar 20, 2019

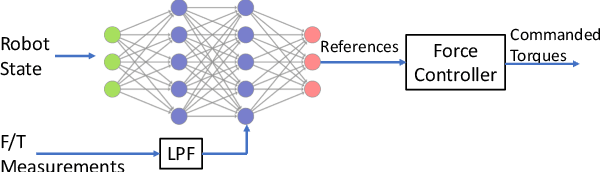
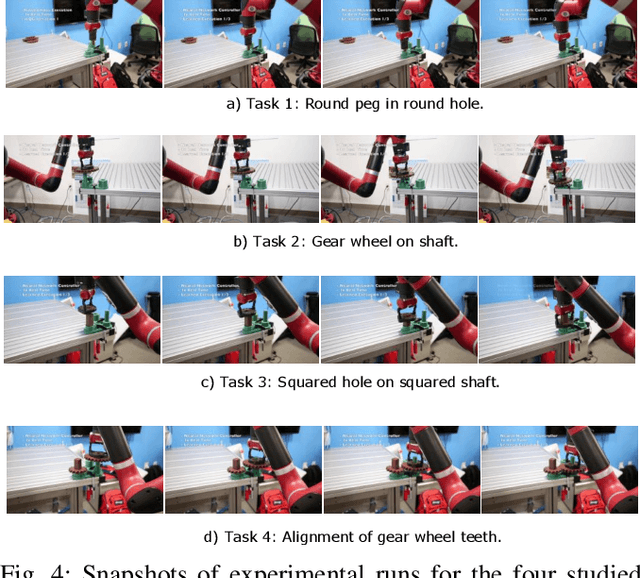
Precise robotic manipulation skills are desirable in many industrial settings, reinforcement learning (RL) methods hold the promise of acquiring these skills autonomously. In this paper, we explicitly consider incorporating operational space force/torque information into reinforcement learning; this is motivated by humans heuristically mapping perceived forces to control actions, which results in completing high-precision tasks in a fairly easy manner. Our approach combines RL with force/torque information by incorporating a proper operational space force controller; where we also exploit different ablations on processing this information. Moreover, we propose a neural network architecture that generalizes to reasonable variations of the environment. We evaluate our method on the open-source Siemens Robot Learning Challenge, which requires precise and delicate force-controlled behavior to assemble a tight-fit gear wheel set.
Design, Simulation, and Testing of a Flexible Actuated Spine for Quadruped Robots
Sep 11, 2018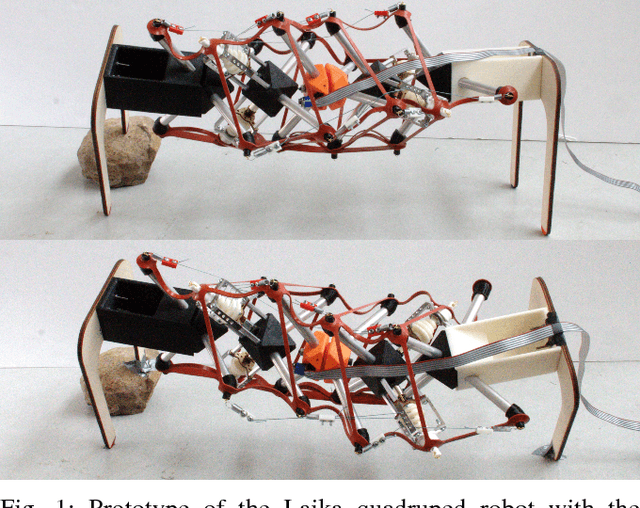
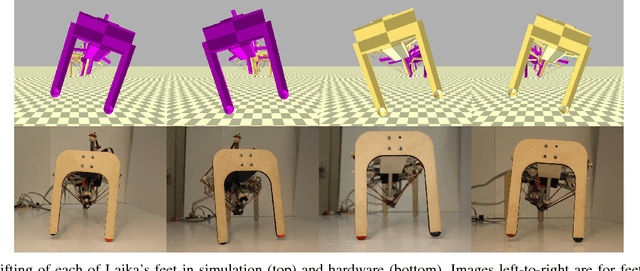
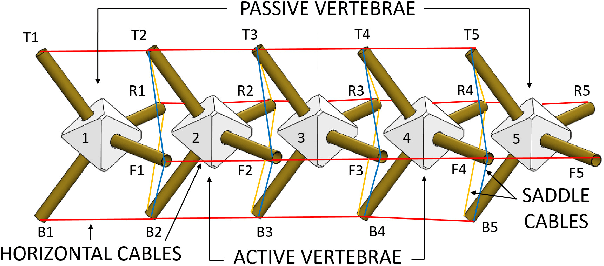
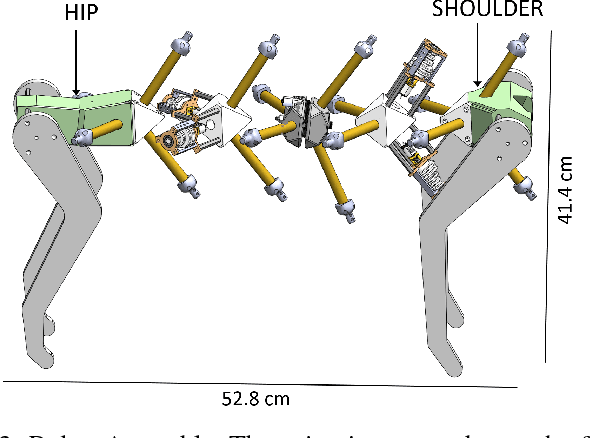
Walking quadruped robots face challenges in positioning their feet and lifting their legs during gait cycles over uneven terrain. The robot Laika is under development as a quadruped with a flexible, actuated spine designed to assist with foot movement and balance during these gaits. This paper presents the first set of hardware designs for the spine of Laika, a physical prototype of those designs, and tests in both hardware and simulations that show the prototype's capabilities. Laika's spine is a tensegrity structure, used for its advantages with weight and force distribution, and represents the first working prototype of a tensegrity spine for a quadruped robot. The spine bends by adjusting the lengths of the cables that separate its vertebrae, and twists using an actuated rotating vertebra at its center. The current prototype of Laika has stiff legs attached to the spine, and is used as a test setup for evaluation of the spine itself. This work shows the advantages of Laika's spine by demonstrating the spine lifting each of the robot's four feet, both as a form of balancing and as a precursor for a walking gait. These foot motions, using specific combinations of bending and rotation movements of the spine, are measured in both simulation and hardware experiments. Hardware data are used to calibrate the simulations, such that the simulations can be used for control of balancing or gait cycles in the future. Future work will attach actuated legs to Laika's spine, and examine balancing and gait cycles when combined with leg movements.
Trajectory Tracking Control of a Flexible Spine Robot, With and Without a Reference Input
Aug 24, 2018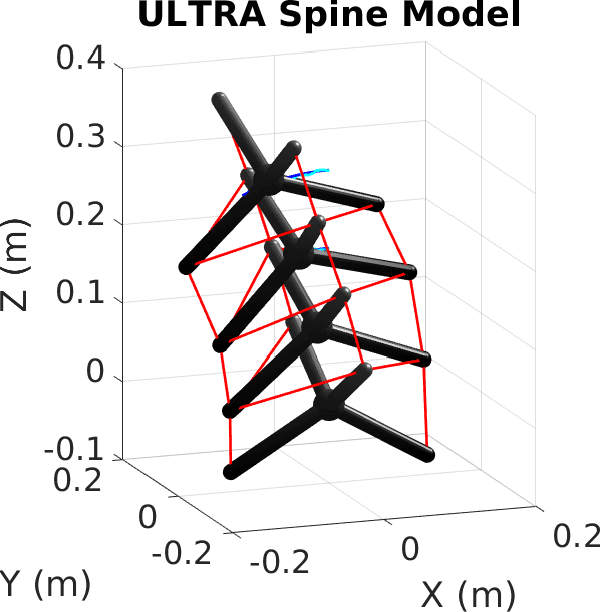
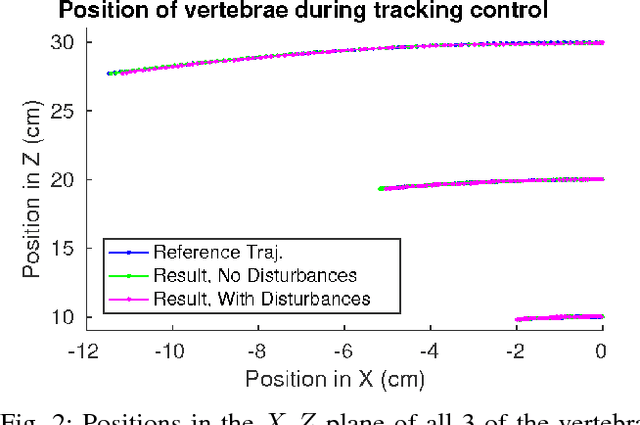
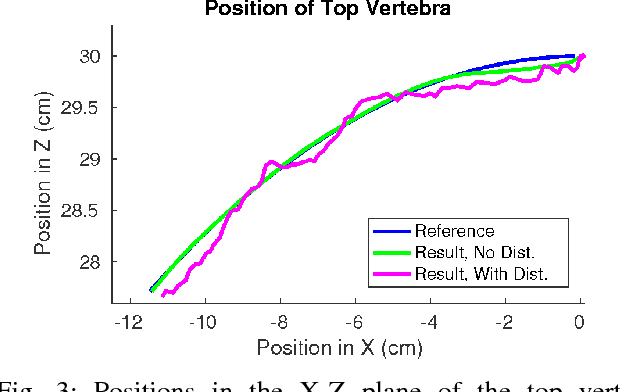
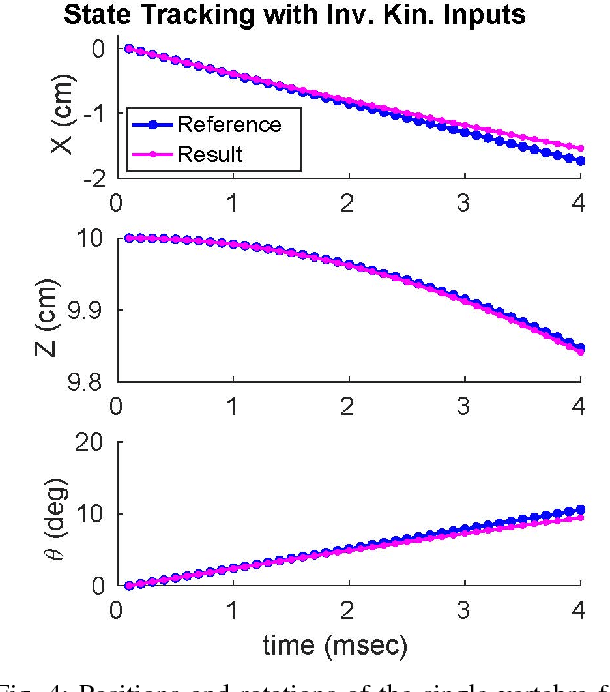
The Underactuated Lightweight Tensegrity Robotic Assistive Spine (ULTRA Spine) project is an ongoing effort to develop a flexible, actuated backbone for quadruped robots. In this work, model-predictive control is used to track a trajectory in the robot's state space, in simulation. The state trajectory used here corresponds to a bending motion of the spine, with translations and rotations of the moving vertebrae. Two different controllers are presented in this work: one that does not use a reference input but includes smoothing constrants, and a second one that uses a reference input without smoothing. For the smoothing controller, without reference inputs, the error converges to zero, while the simpler-to-tune controller with an input reference shows small errors but not complete convergence. It is expected that this controller will converge as it is improved further.
Inclined Surface Locomotion Strategies for Spherical Tensegrity Robots
Aug 27, 2017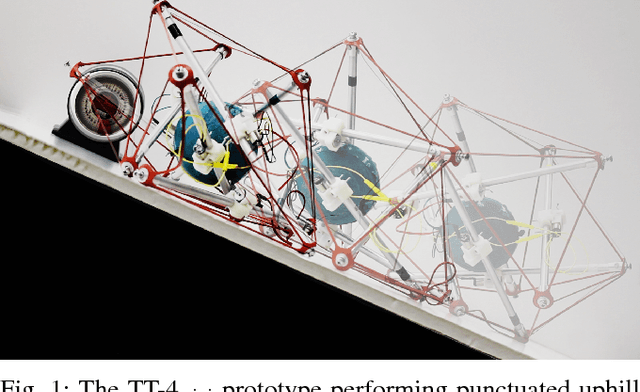
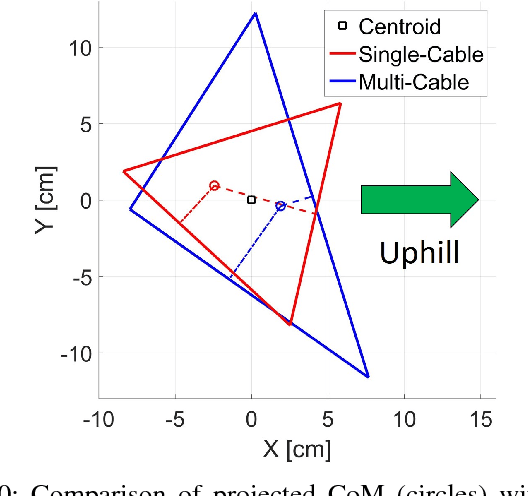
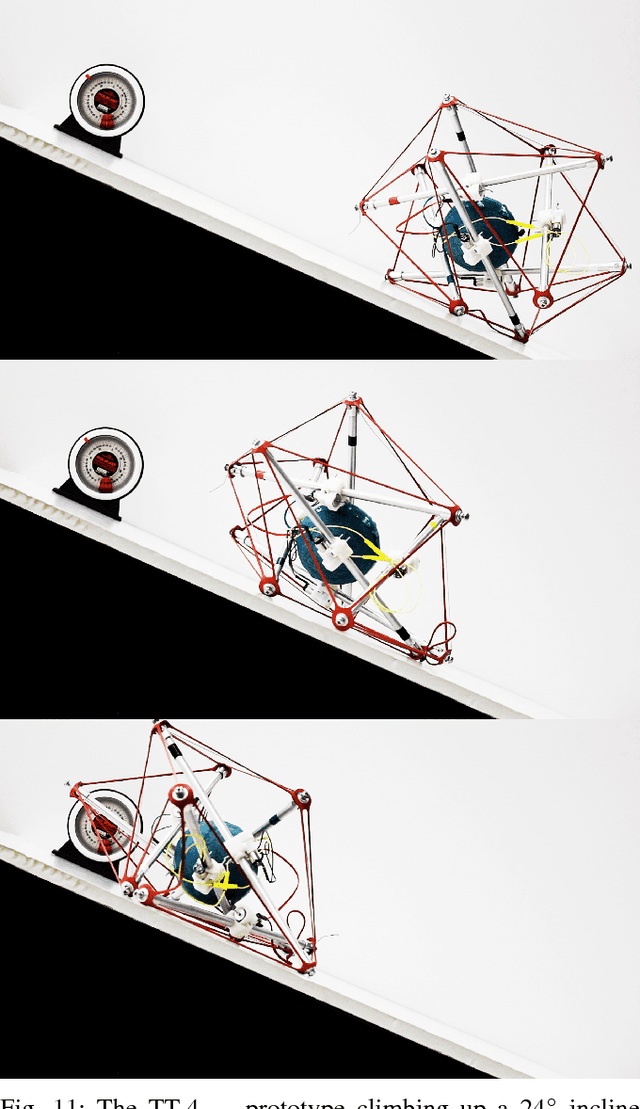
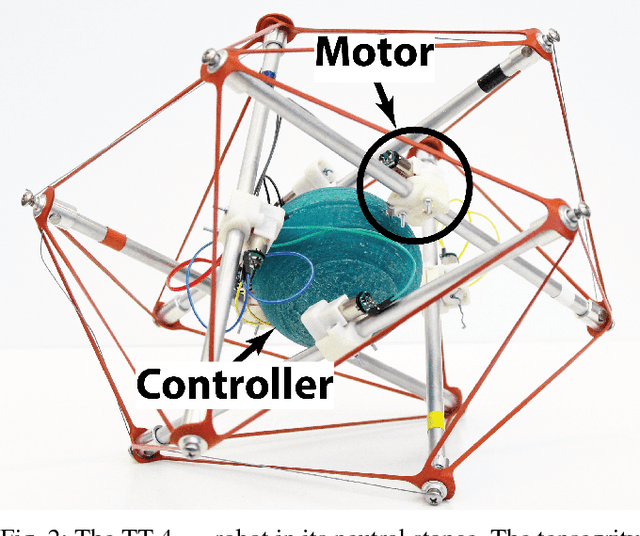
This paper presents a new teleoperated spherical tensegrity robot capable of performing locomotion on steep inclined surfaces. With a novel control scheme centered around the simultaneous actuation of multiple cables, the robot demonstrates robust climbing on inclined surfaces in hardware experiments and speeds significantly faster than previous spherical tensegrity models. This robot is an improvement over other iterations in the TT-series and the first tensegrity to achieve reliable locomotion on inclined surfaces of up to 24\degree. We analyze locomotion in simulation and hardware under single and multi-cable actuation, and introduce two novel multi-cable actuation policies, suited for steep incline climbing and speed, respectively. We propose compelling justifications for the increased dynamic ability of the robot and motivate development of optimization algorithms able to take advantage of the robot's increased control authority.
Stochastic Sensitivity Analysis Using Fuzzy Influence Diagrams
Mar 27, 2013



The practice of stochastic sensitivity analysis described in the decision analysis literature is a testimonial to the need for considering deviations from precise point estimates of uncertainty. We propose the use of Bayesian fuzzy probabilities within an influence diagram computational scheme for performing sensitivity analysis during the solution of probabilistic inference and decision problems. Unlike other parametric approaches, the proposed scheme does not require resolving the problem for the varying probability point estimates. We claim that the solution to fuzzy influence diagrams provides as much information as the classical point estimate approach plus additional information concerning stochastic sensitivity. An example based on diagnostic decision making in microcomputer assembly is used to illustrate this idea. We claim that the solution to fuzzy influence diagrams provides as much information as the classical point estimate approach plus additional interval information that is useful for stochastic sensitivity analysis.
Automated Construction of Sparse Bayesian Networks from Unstructured Probabilistic Models and Domain Information
Mar 27, 2013



An algorithm for automated construction of a sparse Bayesian network given an unstructured probabilistic model and causal domain information from an expert has been developed and implemented. The goal is to obtain a network that explicitly reveals as much information regarding conditional independence as possible. The network is built incrementally adding one node at a time. The expert's information and a greedy heuristic that tries to keep the number of arcs added at each step to a minimum are used to guide the search for the next node to add. The probabilistic model is a predicate that can answer queries about independencies in the domain. In practice the model can be implemented in various ways. For example, the model could be a statistical independence test operating on empirical data or a deductive prover operating on a set of independence statements about the domain.
Management of Uncertainty in the Multi-Level Monitoring and Diagnosis of the Time of Flight Scintillation Array
Mar 20, 2013

We present a general architecture for the monitoring and diagnosis of large scale sensor-based systems with real time diagnostic constraints. This architecture is multileveled, combining a single monitoring level based on statistical methods with two model based diagnostic levels. At each level, sources of uncertainty are identified, and integrated methodologies for uncertainty management are developed. The general architecture was applied to the monitoring and diagnosis of a specific nuclear physics detector at Lawrence Berkeley National Laboratory that contained approximately 5000 components and produced over 500 channels of output data. The general architecture is scalable, and work is ongoing to apply it to detector systems one and two orders of magnitude more complex.
Inference Using Message Propagation and Topology Transformation in Vector Gaussian Continuous Networks
Feb 13, 2013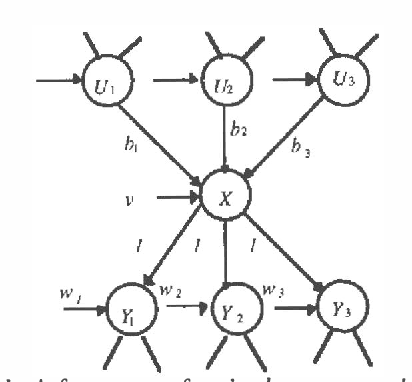
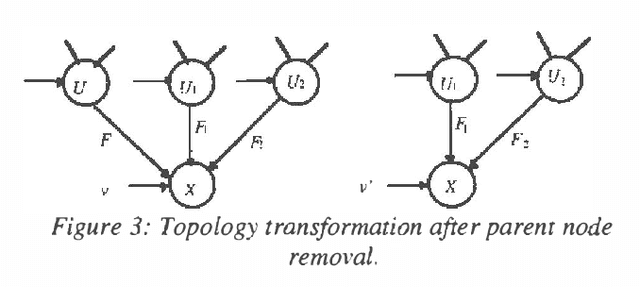
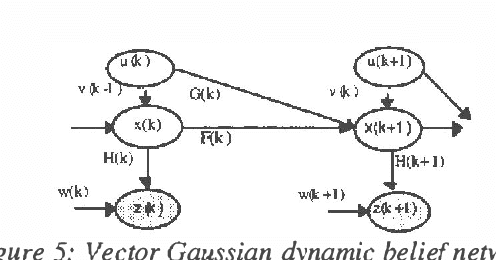
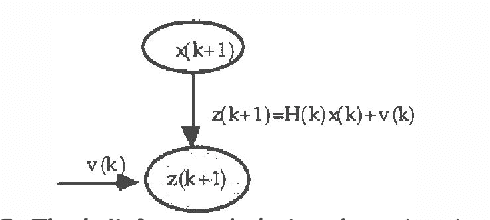
We extend Gaussian networks - directed acyclic graphs that encode probabilistic relationships between variables - to its vector form. Vector Gaussian continuous networks consist of composite nodes representing multivariates, that take continuous values. These vector or composite nodes can represent correlations between parents, as opposed to conventional univariate nodes. We derive rules for inference in these networks based on two methods: message propagation and topology transformation. These two approaches lead to the development of algorithms, that can be implemented in either a centralized or a decentralized manner. The domain of application of these networks are monitoring and estimation problems. This new representation along with the rules for inference developed here can be used to derive current Bayesian algorithms such as the Kalman filter, and provide a rich foundation to develop new algorithms. We illustrate this process by deriving the decentralized form of the Kalman filter. This work unifies concepts from artificial intelligence and modern control theory.