 Add to Chrome
Add to Chrome Add to Firefox
Add to Firefox Add to Edge
Add to EdgeRateless DeepJSCC for Broadcast Channels: a Rate-Distortion-Complexity Tradeoff
Mar 23, 2026In recent years, numerous data-intensive broadcasting applications have emerged at the wireless edge, calling for a flexible tradeoff between distortion, transmission rate, and processing complexity. While deep learning-based joint source-channel coding (DeepJSCC) has been identified as a potential solution to data-intensive communications, most of these schemes are confined to worst-case solutions, lack adaptive complexity, and are inefficient in broadcast settings. To overcome these limitations, this paper introduces nonlinear transform rateless source-channel coding (NTRSCC), a variable-length JSCC framework for broadcast channels based on rateless codes. In particular, we integrate learned source transformations with physical-layer LT codes, develop unequal protection schemes that exploit decoder side information, and devise approximations to enable end-to-end optimization of rateless parameters. Our framework enables heterogeneous receivers to adaptively adjust their received number of rateless symbols and decoding iterations in belief propagation, thereby achieving a controllable tradeoff between distortion, rate, and decoding complexity. Simulation results demonstrate that the proposed method enhances image broadcast quality under stringent communication and processing budgets over heterogeneous edge devices.
SocioVerse: A World Model for Social Simulation Powered by LLM Agents and A Pool of 10 Million Real-World Users
Apr 14, 2025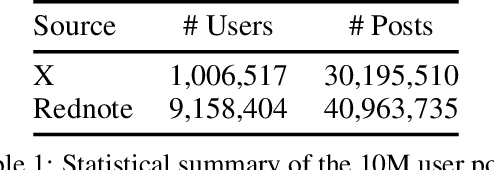
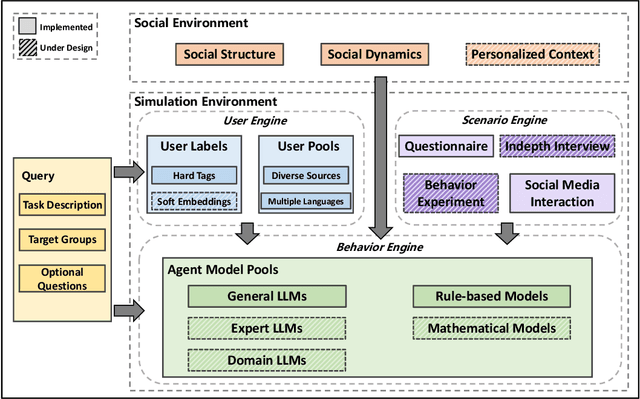

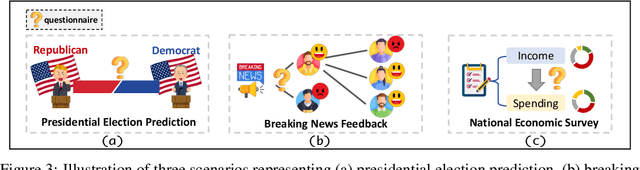
Social simulation is transforming traditional social science research by modeling human behavior through interactions between virtual individuals and their environments. With recent advances in large language models (LLMs), this approach has shown growing potential in capturing individual differences and predicting group behaviors. However, existing methods face alignment challenges related to the environment, target users, interaction mechanisms, and behavioral patterns. To this end, we introduce SocioVerse, an LLM-agent-driven world model for social simulation. Our framework features four powerful alignment components and a user pool of 10 million real individuals. To validate its effectiveness, we conducted large-scale simulation experiments across three distinct domains: politics, news, and economics. Results demonstrate that SocioVerse can reflect large-scale population dynamics while ensuring diversity, credibility, and representativeness through standardized procedures and minimal manual adjustments.
IMNet: Interference-Aware Channel Knowledge Map Construction and Localization
Dec 02, 2024



This paper presents a novel two-stage method for constructing channel knowledge maps (CKMs) specifically for A2G (Aerial-to-Ground) channels in the presence of non-cooperative interfering nodes (INs). We first estimate the interfering signal strength (ISS) at sampling locations based on total received signal strength measurements and the desired communication signal strength (DSS) map constructed with environmental topology. Next, an ISS map construction network (IMNet) is proposed, where a negative value correction module is included to enable precise reconstruction. Subsequently, we further execute signal-to-interference-plus-noise ratio map construction and IN localization. Simulation results demonstrate lower construction error of the proposed IMNet compared to baselines in the presence of interference.
Joint Offloading and Beamforming Design in Integrating Sensing, Communication, and Computing Systems: A Distributed Approach
Aug 28, 2024



When applying integrated sensing and communications (ISAC) in future mobile networks, many sensing tasks have low latency requirements, preferably being implemented at terminals. However, terminals often have limited computing capabilities and energy supply. In this paper, we investigate the effectiveness of leveraging the advanced computing capabilities of mobile edge computing (MEC) servers and the cloud server to address the sensing tasks of ISAC terminals. Specifically, we propose a novel three-tier integrated sensing, communication, and computing (ISCC) framework composed of one cloud server, multiple MEC servers, and multiple terminals, where the terminals can optionally offload sensing data to the MEC server or the cloud server. The offload message is sent via the ISAC waveform, whose echo is used for sensing. We jointly optimize the computation offloading and beamforming strategies to minimize the average execution latency while satisfying sensing requirements. In particular, we propose a low-complexity distributed algorithm to solve the problem. Firstly, we use the alternating direction method of multipliers (ADMM) and derive the closed-form solution for offloading decision variables. Subsequently, we convert the beamforming optimization sub-problem into a weighted minimum mean-square error (WMMSE) problem and propose a fractional programming based algorithm. Numerical results demonstrate that the proposed ISCC framework and distributed algorithm significantly reduce the execution latency and the energy consumption of sensing tasks at a lower computational complexity compared to existing schemes.
Mutual Information Analysis for Factor Graph-based MIMO Iterative Detections through Error Functions
Jul 04, 2023The factor graph (FG) based iterative detection is considered an effective and practical method for multiple-input and multiple-out (MIMO), particularly massive MIMO (m-MIMO) systems. However, the convergence analysis for the FG-based iterative MIMO detection is insufficient, which is of great significance to the performance evaluation and algorithm design of detection methods. This paper investigates the mutual information update flow for the FG-based iterative MIMO detection and proposes a precise mutual information computation mechanism with the aid of Gaussian approximation and error functions, i.e., the error functions-aided analysis (EF-AA) mechanism. Numerical results indicate that the theoretical result calculated by the EF-AA mechanism is completely consistent with the bit error rate performance of the FG-based iterative MIMO detection. Furthermore, the proposed EF-AA mechanism can reveal the exact convergent iteration number and convergent signal-to-ratio value of the FG-based iterative MIMO detection, representing the performance bound of the MIMO detection.
Air-Ground Integrated Sensing and Communications: Opportunities and Challenges
Feb 13, 2023



The air-ground integrated sensing and communications (AG-ISAC) network, which consists of unmanned aerial vehicles (UAVs) and ground terrestrial networks, offers unique capabilities and demands special design techniques. In this article, we provide a review on AG-ISAC, by introducing UAVs as ``relay'' nodes for both communications and sensing to resolve the power and computation constraints on UAVs. We first introduce an AG-ISAC framework, including the system architecture and protocol. Four potential use cases are then discussed, with the analysis on the characteristics and merits of AG-ISAC networks. The research on several critical techniques for AG-ISAC is then discussed. Finally, we present our vision of the challenges and future research directions for AG-ISAC, to facilitate the advancement of the technology.